3, Устройство по п. 1/ о т л и чающееся тем, что блок формирования команд движения содержит элемент ИЛИ и элементы И, первый вход каждого из которы - соединен с соответствующим входом первой группы
входов блока, второй вход каждого элемента И соединен с соответст-вующим входом второй группы входов блока, выходы элементов И соедийены соответственно с входами элемента ИЛИ, выход которого является выходом блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1981 |
|
SU1019401A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU693385A1 |
| Устройство для автоматического адресования грузов | 1985 |
|
SU1270768A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Устройство для адресования грузов | 1983 |
|
SU1130517A1 |
| Устройство для психофизиологических исследований | 1990 |
|
SU1780717A1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для адресования транспортного средства | 1978 |
|
SU746563A1 |
| Многоканальное устройство для сбора данных | 1983 |
|
SU1095163A1 |
1. УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ТРАНСПОРТНЫМИ СРЕДСТВАМИ, содержащее блок индикации адресных позиций, блок формирования команд движения, блок формирования сигналов направления движения, элемент НЕ, элемент ИЛИ-НЕ, дешифратор, счетчик, первый элемент и, генератор прямоугольных импульсов, группу элементов НЕ, группу элементов И и датчики наличия груза, выход каждого из которых соединен с первым входом соответствующего элемента И группы и с соответ- ствующим входом первой группы входов блока формирования команд движения, выход каждого элемента И группы соединен с соответствующим входом элемента ИЛИ-НЕ и через элемент НЕ группы - с со тветствуклдил входом первой группы входов блока формирования сигналов направления движения, выход элемента ИЛИ-НЕ подключен к соответствующему входу первой группы входов блока формирования команд движения, к входу элемента НЕ и к первому входу первого элемента И, второй вход которого подключен к выходу генератора прямоугольных импульсов, выход первого элемента И соединен с входом счетчика, выходы которого соединены соответственно с входами дешифратора, выходы которого подключены соответственно к вторым входам элементов И группы, выход элемента НЕ соединен с соответствующим входом первой группы входов блока.формирования сигналов направления движения, входы второй группы которого и входы второй группы блока формирования команд движения соединены соответственно, с выходами, блока индикации адресных по зиций, выходы блока формирования сигналов направления движения и блока формирования команд движения являются сог : ответственно первым и вторым выходами устройства, отли.чающее ся тем, что, с целью повышения производительности, в него введены датчик ст.епени загрузки, второй элемент И, триггер, элемент ИЛИ и элемент задержки, вход которого подключен к выходу блока формирования команд движения, выход подключен к первому g входу элемента ИЛИ, второй вход ко1(Л торого соединен с выходом триггера, выход элемента ИЛИ подключен к перF вому входу второго элемента И, второй вход которого соединен с выходом датчика степени загрузки, выход вто- я рого элемента И подключен к третье- МУ входу первого элемента и, вход триггера соединен с соответствующим выходом блока индикации адресных позиций.. 2. Устройство по п. 1, о т л и- . ч а ю щ е е с, я тем, что блок формиСл рования сигналов направления движесзь. ния содержит элементы ИЛИ и элементы И, первый вход каждого из которых 4 соединен с соответствующим входом первой группы входов блока, второй вход первого элемента И соединен с первым входом второй группы входов блока, выход каждого элемента И, кромепоследнего, соединен с первым входом соответствующего элемента ИЛИ, второй вход которого подключен к соотретхггвующему входу второй группы входов блока, второй вход каждого элемента И, начиная с втррого, подключен к выходу соотретствующего элемента ИЛИ, выход последнего элемента И 5шляется выходом блока.
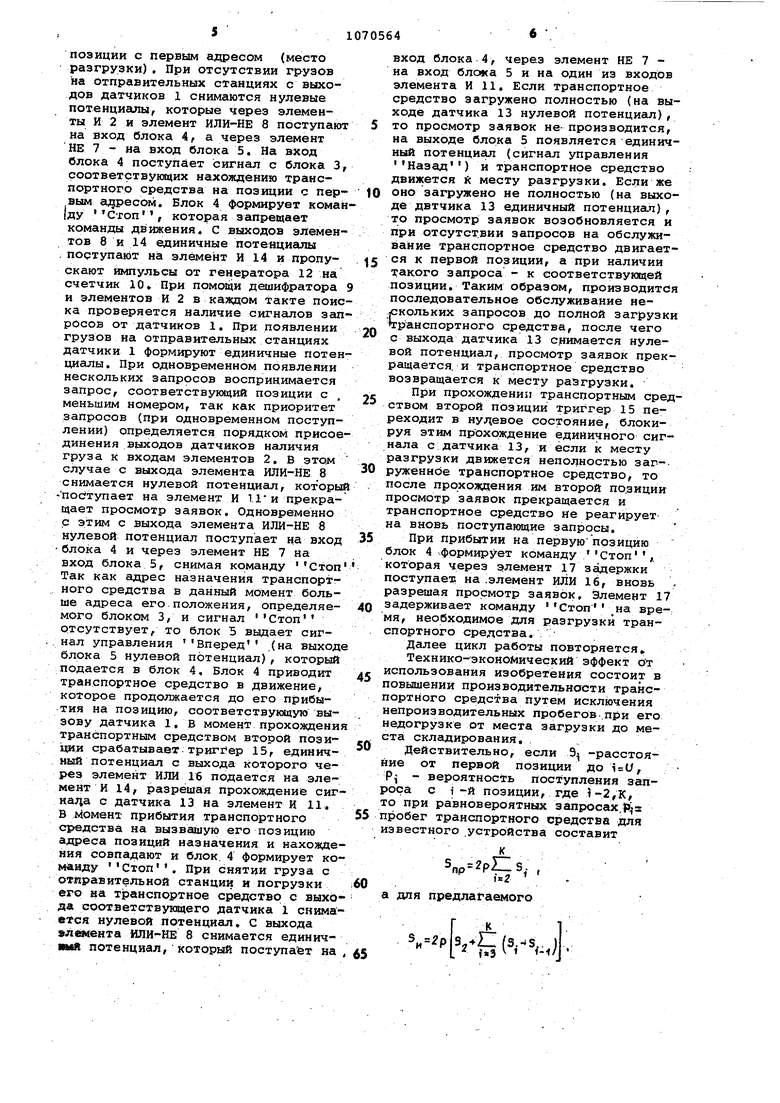
Изобретение относится к автоК1атике и вычислительной технике и может быть использовано для многойрограммного управления движением транспорт ных средств. Известно устройство для управления транспортными средствами, содержащее блок формирования команд движения, две группы вх.одов которого подсоединены соответственно к выхода блока индикации адресных позиций и к выходам дешифратора, подключенного. к соответствующим входам регистра адреса и инверсными выходами ко вторым входам блока формирования сигналов направления движения, первые входы которого подключены к соответствующим выходам блока индикации, адресных позиций, а выход подсоединен к соответствующему входу блока формирования команд движения Cl. Недостатками данного устройства являются сложность и низкая произйодительнрсть. Наиболее близким к предлагаемому является устройство для управлейия транспортными средствами, содержащее датчик загрузки, генератор импульсов, элемент И, счетчик, дешифратор, элемент , элемент НЕ и K-l Цепочек, каждая из которядх состоит из последовательно соединенных датчика наличия груза элемента и и элемента НЕ, выходы элементов НЕ соединены |с соответствующими входами второй группы входов блока формирования сигналов направления движения, выходы датчиков наличия груза подключены к соответствующим К-1 входам второй группы входов блока форьадрования команд движения, а выхйды элементов И соединены с входами элемента ИЛИ-НЕ, выход которого подключен к первому входу второй группы входов блока фор мирования команд движения, к первому входу элемента И и к входу элемента НЕ, .выход которого соединен с первым входом второй группы входов блока .формирования сигналов направления движения выход датчика загрузки под ключен к второму входу элемента И к третьему входу которого подключен выход генератора импульсов, а выход элемента и подсоединен ко входу счет чика, п выходов которого подключены к соответствующим входам дешифратора, К-1 2 выходов которого соединены с управляющими входами соответствующих К-1 элементов И С2. Недостатком известного устройства является низкая .производительность, связанная с непроизводительными пробегами недогруженного транспортного средства от места загрудки до места складирования. Цель изобретения - повышение производительности устройства. Поставленная цель достигается тем, что в устройство, содержащее блок индикации адресных, позиций, блок формирования команд движения, блок формирования сигнёшов направления движения, элемент НЕ, элемент ИЛИ-НЕ, дешифратор, счетчик, первый элемент И, генератор прямоугольных импульсов, группу элементов НЕ, группу элементов И и датчики наличия груза, выход каждого из которых соединен, с первым входом соответствующего элемента И группы и ссоответствующим входом первой группы входов блока.формирования команд движения, выход каждого элемента И группы соединен с соответствующим входом элемента ИЛИ-НЁ и через элемент НЕ группы - с соответствуйщим входом первой группы входов блока формирования сигналов направления движения, выход элемента ИЛИ-НЕ подключен к соответствукндему входу первой группы входов блока формирования команд движения, к входу элемента НЕ и к первому входу первого элемента И, второй вход которого подключен к выходу генератора прямоугольных импульсов, выход первого элемента И соединен с входом счетчика, выходы которого соединены чзоответственно с входами дешифратора, выходы которого подключены соответственно к вторым входам элементов И группы, выход элемента НЕ соединен с соответствующим входом первой группы входов блока формирования сигналов направления движения/ входы втсчрсй групгпы которого и входы второй группы блока формирования команд движения соединены соответственно с |аыходамй блока индикации адресных позиций, выходы блока формирования сигналов направления движения и бло ка формирования команд движения являются соответственно- первым и вторым выходами устройства, введены датчик степени загрузки, второй эле мент И, триггер, элемент ИЛИ и элемент задержки, .вход которого подклю чен к выходу блока формирования команд движения, выход подключен к первому входу элемента ИЛИ, второй вход которого соединен с выходом триггера, выход элемента ИЛИ подклю чен к первому входу второго элемента И, второй вход которого соединен с выходом датчика степени загрузки, выход второго элемента И подключен к третьему входу первого элемента И вход триггера соединен с соответствующим выходом блока индикации адресных позиций. Блок формирования сигналов направления движения в устройстве содержит элементы ИЛИ и элементы И, первый вход каждого из которых соединен с соответствующим входом первой группы входов блока, второй вхо первого элемента И соединен с первы входом второй группы входов блока, выход каждого элемента и, кроме пос -леднего, соединен с первымiвходом соответствукщего элемента ИЛИ, второй вход которого подключен к соответствующему входу второй группы входо блока, второй вход каждого элемента И, начиная с второго, подключен к выходу соответствующего элемента ИЛ выход последнего элемента И являетс выходом блока. Блок формирования команд движени содерлдит элемент ИЛИ и элемента И, первый вход каждого из которых соединен с соответствующим входом первой группы входов , второй вхо кС1ЖДОГО элемента И соединен с соответствующим входом второй группы вх дов блокад выходы элементов И соеди нены соответственно с входами элемента ИЛИ, выход которого является выходом блока, На чертеже приведена схема предла гаемого устройства. Устройство содержит датчики 1 наличия груза, элементы И 2, блок -3 индикации адресных позиций, блок 4 формирования команд движения, блок 5 формирования сигнсшов направления движения, элементы НЕ 6, элемент НЕ 7, элемент ИЛИ-НЕ 8, дешифратор 9 счетчик 10. элемент И 11, генератор 12прямоугольных импульсбв, датчик 13степени загрузки, элемент И 14, тригг1ер 15, элемент ИЛИ 16, элемент 17 .задержки, элементы. И 18-21, элементы ИЛИ , элементы И 25-28, элемент ИЛИ 29 и узел 30 управления приводом,Датчики 1 служат для регистрации наличия груза на отправительных станциях и определения номера позиции, к которой должно быть подано транспортное средство. Элементы И 2 используются для уп/равления прохождением запросовот датчиков 1. Блок 3 индикации адресных позиций предназначен для формирования сигналов с позиций в момент нахождения на них транспортного средства. Блок 4 формирования команд движем, ния служит для формирования команд движения и останова транспортного средства на основе сигналов о нап равлении движения, выработанных блоком 5/ и сигнала останова, выработанного схемой совпадения (не показана) одноименных адресов датчиков 1 и блока 3. Блок 5 формирования сигналов направления движения -предназначен для выработки сигналов движения в зависимости от того, больше или меньше очередной ащрес адреса на- . хождения транспортного средства. Элементы НЕ б и 7 служат для инвертирования сигналов, поступающих на группу входов блока 5, элемент ИЛИ-НЕ 8 - для сборки и инвертирования сигналов,, снимаемых с элементов 2, дешифратор 9 - для преобразования кода -счетчика 10 в унитарный код, счетчик 10 - для формирования кодов номеров опрашиваемых датчиков 1, элемент И 11 для управления прохождением импульсов от генератора 12, генератор 12для выработки импульсов сканирования. Датчик 13 степени загрузки используется для формирования единичного потенциала при неполной загрузке транспортного средства, и нулевого - при полной. Элемент И 14 служит для управления прохождением сигнала от датчика 13, Триггер 15 предназначен для формирования сигнала в момент прохождения транспортным средством второй по.зиции с целью исключения реакции возвращающегося к месту разгрузки транспортного средства на запросы обслуживания при прохождении им второй:позиции. Элемент или 16 служит для сборки сигналов, снимаемых с выходов элемента 17 задержки и триггера 15, а элемент 17 задержки - для задержки команды Стоп на время, необхоЙимбе для разгрузки транспортного средства. Устройство работает следуицим образом. В исходном состоянии незагруженное транспортное средство стоит не позиции с первым адресом (место разгрузки), При отсутствии грузов на отправительных станциях с выходов датчиков 1 снимаются нулевые потенциалы, которые через элементы И 2 и элемент ИЛИ-НЕ 8 поступают на вход блока 4, а через элемент НЕ 7 - на вход блока 5, На вход блока 4 поступает сигнал с блока 3, соответствуклцих нахождению транспортного средства на позиции с первым aj pecoM. Блок 4 формирует коман ду Стоп, которая запрещает команды движения. С выходов элементов 8 и 14 единичные потенциалы поступают на элемент И 14 и пропуекают импульсы от генератора 12 на счетчик 10 При помощи дешифратора и элементов И 2 в каяздом такте поис ка проверяется наличие сигналов зап росов от датчиков 1. При появлении грузов на отправительных станциях датчики 1 формируют единичные потен циалы. При одновременном появлении нескольких запросов воспринимается запрос, соответствующий позиции с . меньшим номером, так как приоритет запросов (при одновременном поступлении) определяется порядком присое динения выходов датчиков наличия груза к входам элементов 2, В этом случае с выхода элемента ИЛИ-НЕ 8 снюхается нулевой потенциал, которы -поступает на элемент И Т1 и прекращает просмотр заявок. Одновременно с Эгтим с выхода элемента ИЛИ-НЕ 8 нулевой потенциал поступает на вход -блока 4 и через элемент НЕ 7 на вход блока 5, снимая команду Стоп Так как адрес назначения транспортного средства в данный момент больше адреса его положения, определяемого блоком 3, и сигнал Стоп отсутствует, то блок 5 выдает сигнал управления Вперед ,(на выход блока 5 нулевой потенциал), который подается в блок 4. Блок 4 приводит транспортное средство в движение, которое продолжается до его прибытия на позицию, соответствукхцую вызову датчика 1, В момент прохождени транспортным средством второй позидай срабатывает тригг ер 15, единичный потенциал с выхода которого через элемент ИЛИ 16 подается на элемент И 14, разрешая прохождение сиг када с датчика 13 на элемент И 11, В NiOMeHT прибытия транспортного средства на вызвашую его позицию адреса позиций назначения и нахожде ния совпадают и блок. 4 формирует ко манду Стоп. При снятии груза с отяравительной станции и погрузки его на транспортное средство с выхо да соответствующего датчика 1 снима ется нулевой потенциал, С выхода л дмента ИЛИ-НЕ 8 снимается единичтлЛ потенциал, который поступает на вход блока 4, через элемент НЕ 7 на вход блока 5 и на один из входов элемента И 11. Если транспортное средство загружено полностью (на выходе датчика 13 нулевой потенциал), то просмотр заявок не-производится, на выходе блока 5 появляется единичный потенциал (сигнал управления Назад) и тр анспортное средство движется Л месту разгрузки. Если же оно загружено не полностью (на выходе двтчика 13 единичный потенциап), то просмотр заявок возобновляется и при отсутствии запросов на обслуживание транспортное средство двигается к первой позиции, а при наличии такого запроса - к соответствующей позиции. Таким образом, производится последовательное обслуживание не Скольких запросов до полной загрузки тгранспортного средства, после чего с выхода датчика 13 снимается нулевой потенциал, просмотр заявок прекращается, и транспортное средство возвращается к месту разгрузки. При прохождении транспортным средством второй позиции триггер 15 переходит в нудевое состояние, блокируя этим прохождение единичного сигнала с датчика 13, и если к месту разгрузки движется неполностью загруженное транспортное средство, то после прохолсдения им второй пО.зиции просмотр заявок прекращается и транспортное средство не реагирует на вновь поступающие запросы. При прибытии на первую позицию блок 4 .формирует команду Стоп, которая через элемент 17 задержки поступает на .элемент ИЛИ 16, вновь . разрешая просмотр заявок. Элемент 17 задерживает команду Стоп на время, необходимое Для разгрузки транспортного средства. . Далее цикл работы повторяется. Технико-экономический эффект от использования изобретения состоит в повышений производительности транспортного средства путем исклк)чения непроизводительных пробегов при его недогрузке от места загрузки до места складирования. Действительно, если Э -расстояние от первой позиции до , Р - вероятность поступления запроса с t -и позиции, где i-2,K, то при равновероятных запросах, пробег транспортного средства для известного .устройства составит а для предлагаемого Ivi 5,.pjS,.n(S..S,j| L f«3
Непроизводительный пробег транспортного средства составляет
к Л5«5„р-3 2рП5,. .
даже в случае одинаковой вероятности наличия и отсутствия запросов (,5)
устраняемый с помощью изобретения непроизводительный пробег транспортного средства составляет достаточно большую величину: к
..
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке №3370112/18-24, кл. | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
