со
4 Изобретение относится к автоматизации производственных процессов и может быть использовано для многопрограммного управления движением транспортных средств. Известно цифровое устройство упра ления транспортнЕлми средствами, осуществляющее операции переноса грузов из одного адреса в другой, содержащее елок программ, блок номера адресной позиций, комбинационные двоич ные сумматоры, блок управления испол нительными механизмами, элемент И, элемент И-НЕ til. Недостатками известного устройства являются его сложность и низкая производительность, Наиболее близким техническим; реше к изобретению является устройств для упр&вления транспортньми средствами, сОуЦержащее блок формирования команд движения, две группы из К вхо дов которого подсоединены соответст шенно к. К выходам блока индикации адресных.позиций и к к выходам дешифратора, подключенного входами к соотве ствующим входам регистра адреса и :инверсныгли выходами к вторым К входам блока формирования сигналов направле ния движения,, первые К входов которого подключены к соответствукяиим выходам блока индикации адресных позиций а выход подсоедине-н к соотвётствующе блока формирования кома;нд движения . Однако известное устройство имеет малую производительность, связанную с бесприорите±ным обслуживанием заяBQK и низким уровнем автоматизации процесса ввода заявок на о 5служивание. Цель изобретения - расширение .функциональных возможностей. Поставленная цель достигается тем, что в устройство для управления транспортньми средствами, содержащее блок индикации адресных позиций, соединенный К выходами с К входами первых групп входов блока формирования коман) и блока формирования си.рналов направления движения, выход КОТОРОГО: соединен с соответствующим входом блока формирования команд, введены К-1 цепочек, каждая из которых состоит из последовательно соединенных датчика наличия груза, пер-г в5го элемента И и первого элемента НЕ Последовательно соединенные элементы ИЛИ-НЕ второй элемент НЕ, последовательно соединенные генератор импульсов, второй элемент И, счетчик и дешифратор, и датчик загрузки, соединенный выходом с вторым входом второ го элемента И, и третий вход которого соединен с выходом элемента ИЛИ-НЕ и с первым входом второй группы блока формирования команд, у которого остальные К-1 входов второй группы входов соединены с выходами датчиков наличия груза, выходы дешифратора соединены с вторыми входами первых элементов И, выходы которых соединены с. входами элемента ИЛИ-НЕ, выход второго элемента НЕ соединен с первым входом второй группы входов, блока формирования сигналов направления движения, у которого остальные К-1 входов второй группы входов соединены с выходами первых элементов НЕ. На фиг. 1 приведена структурная схема устройства/ на фиг. 2 - структурная схема блока формирования команд.. Устрой ство содержит датчики 1 наличия груза, первый элемент И 2, блок 3 индикации адресных позиций, блок 4 формирования команд, блок 5 |формирования сигналов направления движения, первый элемент 6 НЕ, второй элемент 7 НЕ, элемент 8 ИЛИ-НЕ, дешифратор 9, счетчик 10, второй элемент 11 И, генератор 12, датчик 13 загрузки. Датчики 1 служат для регистрации наличия груза на отправительных станциях и определения номера позиции, к которой должно бь1ть подогнано транспортное средство. Элементы И 2 служат для управления прохождением запросов от датчиков 1. Блок 3 индикации.адресных позиций служит для формирования сигналов с позиций в момент нахождения на них транспортного средства. Элок 4 формирования команд движения служит для формирования команд движения и Останова транспортного средства на основе сигналов о направлении движения, выработанных блоком 5, и сигнала останова. Блок 5 формирования сигналов направления движения служит для выработки сигналов движения в зависимости от того, больше или меньше очередной адрес адреса нахождения транспортного средства. Элементы 6 и 7 НЕ служат для инвертирования сигналов, поступающих на вторую группу входов блока 5. Элемент 8 ИЛИ-НЁ служит для сборки и инвертирования сигналов, снимаемых с элементов 2. Дешифратор 9 служит для преобразования кода счетчика 10 в унитарный код. п-разрядный счетчик 10 () служит дпя формирования кодов номеров опрацшваемь1Х датчиков 1. Элемент 11 И служит для управления прохождением импульсов от генератора 12 импульсов. Генератор 12 импульсов служит для выработки импульсов сканирования. Датчик 13 загрузки служит для фопмирования единичного потенциала, если транспортное средство не загружено, и нулевого потенциала - если загружено.
Устройство работает следующим образом.
В и.2х }дном состоянии незагруженное транспортное средство стоит на позиции с адресом 1 (место разгрузки) . При отсутствии груза на отправительньл станциях .с в ыходов датчиков 1 снимаются нулевые потенциалы, которые через элементы 2 И, элемент ИЛИ-НЕ поступают На- п-эрвый вход второй группы входов блока 4, а через элемент 7 НЕ - на первый вход второй группы входов блока 5. На первый вход первой группы входов блока 4 поступает сигнал с блока 3, соответствующий нахождению транспортного средства на позиций с адресом 1. Блок 4 формирует команду стоп, которая запрещает команды движения. С выходов элемента 8 и датчика 13 эагрузки единичные потенциалы постук пают на элемент 11 И и пропускают импульсы от генератора 12 на счетчик 10. При помощи, дешифратора; 9 и элементов 2 И в каждом такте поиска проверяется наличие ригналов запросов от датчика 1 При появлении гру|за на отправительныя станциях датчики 1 формируют единичные потенциалы. При oднoiвpeмeннoм появлении нескольких запросов воспринимается запрос, сдответствующий позиции с меньшим , так ка.к приоритет запросов онредаляе т ся порядком тгрисоединения выходов датчиков наличия гру за {(входам элементов 2. в э-.ом случае с; выхода элемента 8 снимается нулевой потенциал, который поступает на элемент 11 И и прекращает просмот задвок. Одновременно с этим с выхода элемента 8 нулевс потенциал поступает на первый вход второй группы входов блока 4 и через элемент 7 Щ на первый вход второй группы входов блока 5, сйимая тем самым команду Стоп. Так как адрес наэиачения трайспортного средства в данный момент больше адреса его положения,
определяемого блоком 3, и сигнал Стоп отсутствует, то блок ,5 выдает сигнал управления Вперед (на выхОде блока 5 - нулевой потенциал), который подается в блок 4 Блок 4 приводит транспорткое средство в движение, которое продолжается до тех пор, пока оно не придет на позицию, соответствующую вызову,датчика 1. В момент прибытия транспортного средства на вызвавшую его позицию адреса позиций назначения и нахождения совпадают и блок 4 формирует команду Стоп.
При снятии груза с отправительной станции и загрузке транспортного средства с выходов соответствующего датчика 1 и датчика 13 будут сниматься нулевые потенциалы. С выхода элемента 8 снимается елцаничный потенциал, который поступает на первый вход второй группы входов блока 4 и через элемент 7 - на первый вход второй группы входов блока 5.. На выходе блока 5 появится единичный потенциал и транспортное средство будет двигатьс назад. Причем нулевой потенциал с датчика 13 будет блокировать прохождение . импульсов от генератора 12 и просмотр запросов производиться не будет. После прибытия транспортного средства на 1 позицию (месТО разгруз ки) блок 4 формирует команду С;топ. После разгрузки транспортного средства на выходе датчика 13 появится единичный потенциал и просялотр запросов возобновится. Далее Цикл работы повторяется..
Технико-экономический э ффект использования изобретения состоит в (Повышении производительности трансПортного средства за счет исключений его непроизводительных простоев путем автоматического сбора и ввода заявок на обслуживание и за счёт введения приоритетного обслуживания заявок.
Фиг.1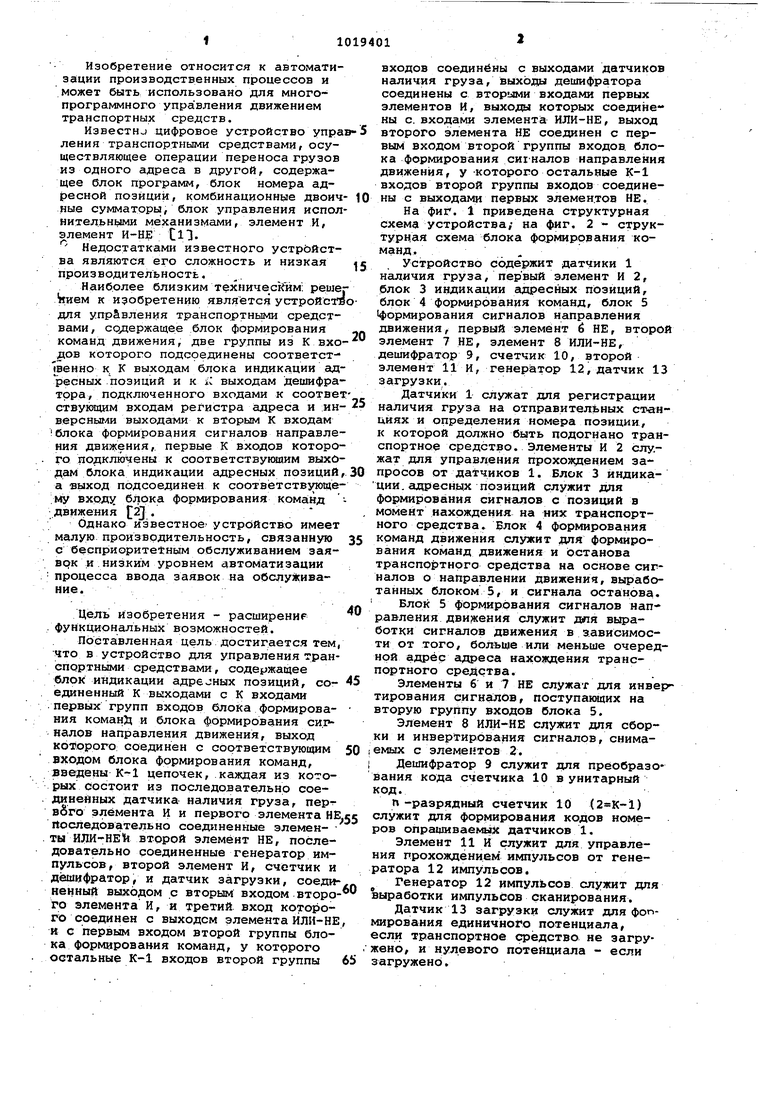
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1982 |
|
SU1070564A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU693385A1 |
| Устройство для управления транспортными средствами | 1990 |
|
SU1705842A1 |
| Устройство для адресования грузов | 1983 |
|
SU1130517A1 |
| Устройство для психофизиологических исследований | 1990 |
|
SU1780717A1 |
| Устройство для индикации положения грузоносителя | 1987 |
|
SU1537632A1 |
| Многоканальное устройство для сбора данных | 1983 |
|
SU1095163A1 |
| Устройство для адресования транспортного средства | 1978 |
|
SU746563A1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |

УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ., ТРАНСПОРТНЫМИ СРЕДСТЙЙМй, содержащее бЛ1ЭК индикации адресных позиций, соединенный К выходами с К входами первых групп входов блока формирования команд и блока формирования сигналов направления движения, выход которсэго соединен с соответствующим входом блока формирования команд, отличают е е; с я тем, что, с целью расширения функциональных возможностей, в неговведены К-1 цепочек, каждая из которых- состоит из последовательно соединенных датчика наличия груза, первого элемента И и , первого элемента НЕ, последовательно соединенные элемент ИЛИ-НЕ и второй элемент НЕ, последовательно соединенные генератор импульсов, второй SjieMeHT И, счетчик и дешифратор, и датчик загрузки, соединенный выходом с вторым входом второго элемента И, третий вход которого соединен с выходом элемента ИЛИ-НЕ и с первым вз1.одом второй группы входов блока формирования команд, у которого ос.тальные К-1 входов второй группы входов соединены с выходами,- датчиков наличия груза, выходы дешифратора соединеныс вторыми входами первых элементов И, выходы которых сеединены с входами элемента ИЛИ-НЕ, выход второго элемента НЕ соединен с W первым входом второй группы входов блока формирования сигналов направления движения, У которого с&стальные K-i входов второй группы входов сое- д динены с выходами первых элементов НЕ,С
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU690500A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления транспортными средствами | 1977 |
|
SU693385A1 |
| . | |||
