Изобретение относится к автомати™ ке и вычислительной технике и может быть использовано на складах грузов, оснащенных кранами-штабелерами,
Цель изобретения. - упрощение и повышение помехоустойчивости устройства .
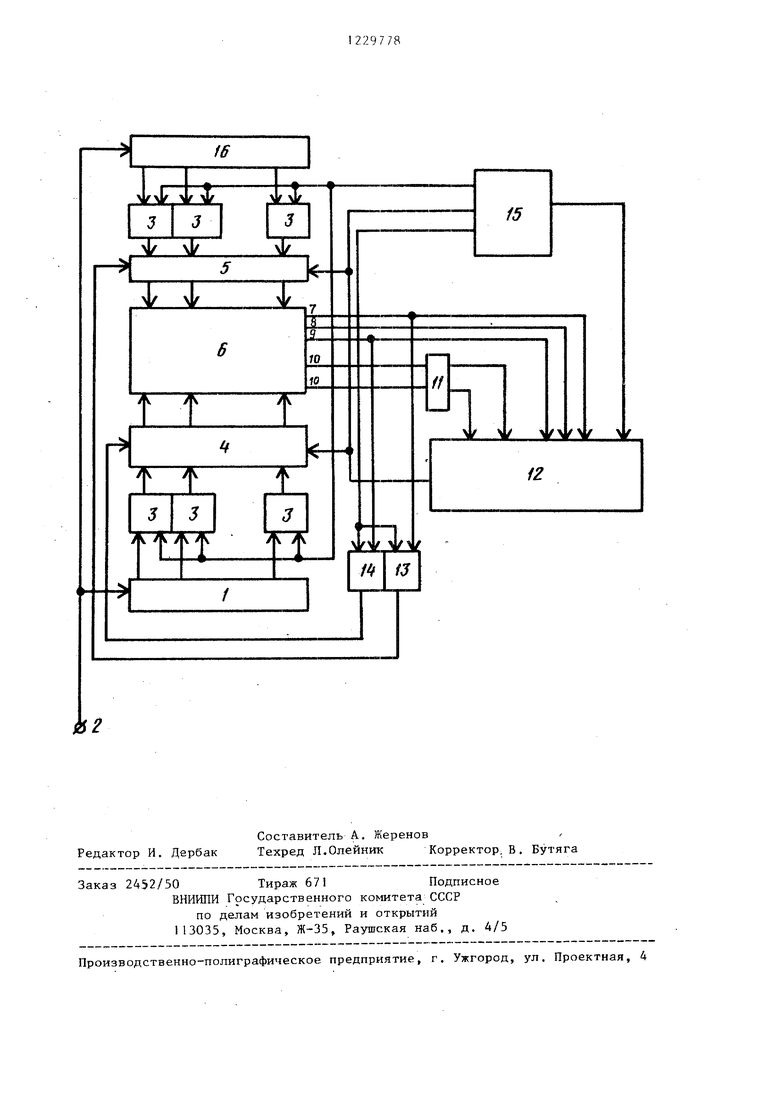
На чертеже представлена схема устройства.
Устройство содержит блок 1 задания адреса, вход 2 пуска, группы 3 элементов И, блок 4 памяти заданной позиции, блок 5 памяти исходной позиции, блок 6 сравнения, выходы Вперед 7, Назад 8, Стоп 7 блока 6, информационные выходы 10 блока 6, дешифратор 11, блок 12 управления исполнительными механизмами, элементы И 13 и 14, генератор 15 тактовых импульсов и блок 16 датчиков обратной связи.
При кодовом методе определения координат датчики обратной связи могут содержать логическую схему, состоящую из входных шин, подключенных к одноименным разрядам бесконтактных датчиков истинного положений Подключенных по входам элементов И. -,
Датчики обратной связи при число- импульсном методе определения координат могут содержать реверсивный счетчик, датчики, элементы ИЛИ, И и триггер исходного положения. Блок сравнения может быть выполнен на ин™ тегральных микросхемах серии 155, например ИПЗ,
Устройство работает следующим образом.
В исходном состоянии кран-штабе- лер находится у одной из разгрузоч- но-погрузочных позиций.
При включении питания- сигналом установки с выхода генератора 15 тактовых импульсов блоки 4 и 5 устанав- . ливаются в начальное состояние.
На выходе 9 блока 6 сравнения формируется команда Стоп. По коман де Пуск с входа 2 устройства на вы ходах блока 16 формируется двоичньш код, постоянно присутствующей на вхо дах группы 3 элементов И. В блоке 1 задания адреса формируется двоичньи код адреса позиции. По сигналу с выхода генератора 15 командой Запуск черЪз входы блоков 4 и 5 записываются требуемый и исходный адреса крана штабелера. Блок 6 сравнения опреде- .ляет, какой из адресов меньше и на
,
2297782
сколько, чтобы задать определенную скорость движения.
Допустим, величина заданной.адресной позиции по абсолютному значеS нию превьппает величину исходной адресной позиции на десять единиц, В этом случае на выходе 7 блока 6 сравнения появляется сигнал Вперед. Он поступает на вход блока 12 и по
0 сигналу синхронизации включает привод исполнительного механизма, по сигналу Вперед открывается элемент И 13, тактовые импульсы с выхода генератора 15 поступают на вход блока
15 5 памяти исходной позиции, Это происходит до тех пор, пока состояние блока 5 не полностью соответствует состоянию блока 4,
Одновременно с сигналом Вперед
20 на выходах 10 появляются сигналы кода разности между кодом заданной адресной позиции и кодом исходной адресной позиции, который через дешифратор 11 подается на входы блока
25 12 и включает привод исполнительного механи зма на движение со скоростью, определяемой необходимым упреждением. Команда,на переключение скорости подается с одного из выходов дешифра30 тора 11 по сигналу установки с выхода генератора 17 тактовых импульсов и записывается в блок 12. В зависимости от состояния на выходах 10 блока 6 сравнения на выходах дешифjr ратора 11 формируются команды на переключение скорости за любое число позиций с требуемым упреждением.
Последующими сигналами установки с выхода генератора 15 тактовых им4Q пульсов устанавливаются блоки 5 и 4, команда на переключение скорости переписывается в блок 12, сигналами с выходов генератора 15 устанавливаются адреса заданной и исходной пози ций, переписывается в блок 12 направление движения, Этс происходит до тех пор,, пока кран-щтабелер не достигает заданного адреса, записанного в блоке 4,
- При достижении краном-штабелером заданного адрес снимается сигнал Вперед и на, выходе 9 блока 6 сравнения появляется сигнал Стоп, Кран-щтабе.пер останавливается у за- 55 данного адреса,
В случае, если величина адресной позиции меньще величины исходной, на выходе 8 блока 6 сравнения появляет3-
ся сигнал Назад. Этот сигнал открывает элемент И 14 и включает привод исполнительного механизма на движение назад. На выходах дешифратора I формируется сигнал переключения скорости.
При прохождении крана-штабелера мимо адресных позиций с датчиков обратной связи блока 16 в блок 5 записываются текущие адреса транспортного средства. Каждое новое состояние блока 5 сравнивается с состоянием блока 4.
При достижении краном-штабелером заданного адреса число, записанное в блоке 4, становится равным числу, записанному в блок 5. Сигнал Назад на выходе 8 блока сравнения снимает
вы
ся, на выходах 10 блока 6 нулевое состояние, привод ключается, снимается скорость и кран-штабелер останавливается у данного адреса.
сравнения Назад
завы
Формула изобретения25
Устройство для автоматического адресования транспортного средства, содержащее блок датчиков обратной
вы-20
связи, блок задания адреса, блок па- зо ми, первый синхронизирующий выход мяти заданной позиции, блок памяти исходной позиции, блок управления исполнительными механизмами, дещиф- ратор, выходы которого соединены согенератора тактовых импульсов соед нен с вторыми входами первого и вт рого элементов И, установочный вых подключен к входам сброса блока па ти исходной позиции, блока памяти заданной позиции и блока управлени исполнительными механизмами, второ синхронизирующей выход генератора тактовых импульсов соединен с син ронизирующим входом блока управлен исполнительными механизмами, отл чающееся тем, что, с целью его упрощения, выходы кода разност блока сравнения подключены к соотв
ответственно с группой входов управления скоростью блока управления исполнительными механизмами, два элемента И, генератор тактовых импульсов, две группы элементов И, блок сравнения, первая и вторая группы информа{;ионных входов которого соединены соответственно с выходами блока памяти исходной позиции и блока памяти заданной позиции, синхронизирую-
щие входы которых соединены соответ- ствующим входам дешифратора,
10
25
ственно с выходами первого и второго элементов И, выход Больше блока сравнения подключен к первому входу первого элемента И и к первому входу задания направления блока управления исполнительными механизмами, второй вход задания направления которого и первый вход второго элемента И соединены с выходом Меньше блока сравнения, входы разрешения выдачи блока задания адреса и блока датчиков обратной связи подключены к входу пуска устройства, первые входы элементов И первой и второй групп соединены с запускающим выходом генератора тактовых импульсов, вторые входы элементов И первой группы соединены соответственно с выходами блока датчиков обратной связи, а выходы под- 20 ключены соответственно к информационным входам блока памяти исходной по- . зиции, входы элементов И второй группы соединены соответственно с выходами блока задания.адреса, а выходы подключены соответственно к информационным- входам блока памяти заданной позиции, выход Равно -блока сравнения подключен к входу останова блока управления исполнительными механизма15
ми, первый синхронизирующий выход
генератора тактовых импульсов соединен с вторыми входами первого и второго элементов И, установочный выход подключен к входам сброса блока памяти исходной позиции, блока памяти заданной позиции и блока управления исполнительными механизмами, второй синхронизирующей выход генератора тактовых импульсов соединен с синхронизирующим входом блока управления исполнительными механизмами, отличающееся тем, что, с целью его упрощения, выходы кода разности блока сравнения подключены к соответ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| Устройство для программного управления краном-штабелером | 1982 |
|
SU1070509A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для автоматического адресования транспортных средств | 1982 |
|
SU1027737A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано на складах тарно- штучных грузов, оснащенных кранами- штабелерами. Целью изобретения является упрощение и повьшение помехоустойчивости устройства. Устройство содержит датчики обратной связи, блок задания адреса, болк памяти заданной позиции, блок памяти исходной позиции, блок управления исполнительными exaнизмaми, дешифратор, соединенный с блоком управления исполнительными механизмами и предназначенный для формирования команды задания скорости движения, два элемента И для коммутатции сигналов генератора тактовых импульсов, две группы элементов И для подключения выходов датчиков обратной связи и блока задания адреса,,блок сравнения, формирующий команды Вперед, Назад, Стоп, и код разности значений, поступающих с выходов блока памяти ис- . ходной позиции и блока памяти заданной позиции. 1 ил. о $ (Л ю tc со 00
| Устройство для автоматического управления штабелером | 1975 |
|
SU557375A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для автоматического адресо-ВАНия ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU822201A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
