Изобретение относится к сельскохозяйственному машиностроению, а именно к устройствам автоматического направления движения тракторов или других сельскохозяйственных машин в процессе пахоты, прополки, посадки или уборки рядковых культур.
По основному авт. св. № 1037856 известно автоматическое устройство для управления подвижным объектом, содержащее телевизионную камеру с цветным светофильтром на входе и электронной схемой увеличения контрастности изображения, временной дискриминатор, первый фильтр нижних частот, генератор импульсов и синхронизатор.
Недостатком известного устройства является то, что при установке его на различные объекты невозможно обеспечить оптимальные режимы этих объектов и получить максимальную точность и надежность автоматического вождения из-за наличия только одного Выхода по управляющему сигналу, соответствующего суммарному линейному и угловому отклонению подвижного объекта от направляющей траектории.
Целью изобретения является расширение области применения устройства путем получения независимых сигналов управления, соответствующих линейному и курсовому отклонениям подвижного объекта от направляющей траектории.
Указанная цель достигается тем, что устройство дополнительно снабжено фильтром кадровых сигналов, фазосдвигающей цепью, первым и вторым усилителями, фазовым детектором, вторым фильтром нижних частот, блоком коррекции, блоком вычитания и фильтром курсового сигнала, при этом вход фильтра кадрового сигнала подключен к выходу синхронизатора, а его выход через фазосдвигающую цепь и.первый усилитель -к первому входу фазового детектора, второй вход которого через второй усилитель связан с выходом фильтра курсового сигнала, вход которого соединен с выходом временного дискриминатора, а выход фазового детектора через второй фильтр нижних частот и блок коррекции связан с первым входом блока вычитания, второй вход которого соединен с выходом первого фильтра нижних частот.
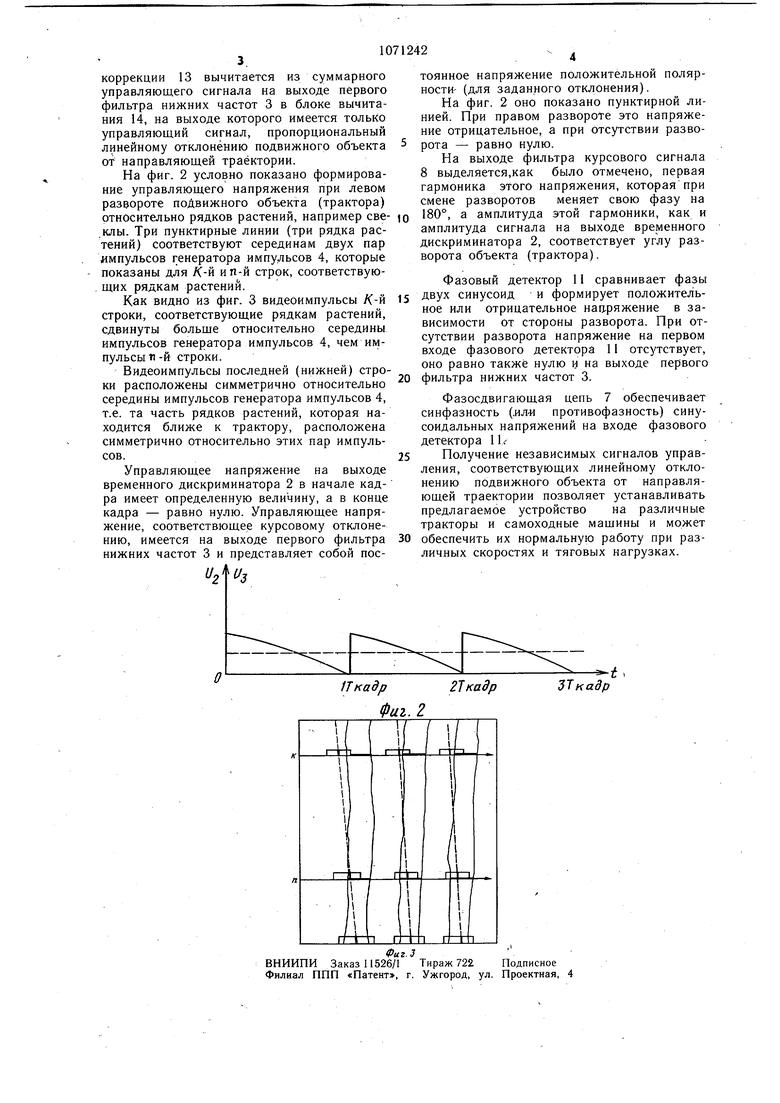
На фиг. 1 изображена функциональная схема предлагаемого устройства; на фиг. 2, 3 - диаграммы формирования управляющего сигнала, соответствующего курсовому отклонению подвижного объекта от направляющей траектории.
Устройство содержит телевизионную камеру 1, временной дискриминатор 2, первый фильтр нижних частот 3, генератор импульсов 4, синхронизатор 5, фильтр кадрового сигнала б, фазосдвигающую цепь 7, фильтр курсового сигнала 8, первый и второй усилители 9, 10, фазовый детектор 11, второй фильтр нижних частот 12, блок коррекции 13, блок вычитания 14. Позицией 15 на фиг. 1 обозначен сюжет рядков растений. Выход телевизионной камеры } соединен с основным входом временного дискриминатора 2, выход которого соединен со входом фильтра курсового сигнала 8 и со входом первого фильтра нижних частот 3, выход которого является первым выходом устройства и соединен с первым входом блока вычитания 14, выход которого является вторым
выходом устройства. Выходы генератора импульсов 4 соединены с управляющими входами временного дискриминатора 2. Выход синхронизатора 5 дополнительно соединен со входом фильтра кадрового сигнала б, выход которого через фазосдвигающую цепь
5 7, первый усилитель 9 и фазовый детектор 11 соединен со входом второго фильтра нижних частот 12, выход которого является третьим выходом устройства и соединен со входом блока коррекции 13. Выход блока коррекции 13 соединен со вторым входом блока вычи0 тания 14. Выход фильтра курсового сигнала 8 через усилитель 10 соединен с первым входом фазового детектора 11.
Устройство работает следующим образом.
Сюжет передачи в виде рядков растений
проецируется на экран телевизионной каме ры 1 и преобразуется в электрический сигнал, поступающий на первый вход временного дискриминатора 2, на второй вход которого поступают два импульса с генератора импульсов 4, запускаемого синхронизатором 5.
На выходе первого фильтра нижних частот 3 имеется управляющий сигнал, соответствующий линейному и курсовому отклонению подвижного объекта от направляющей траектории.
Для получения раздельных управляющих сигналов на вход временного дискриминатора 2 подключают фильтр курсового сигнала 8, который выделяет первую гармонику огибающей сигнала. Этот сигнал усиливается вторым усилителем 10 и подается на пер0 вый вход фазового детектора 11.
С выхода синхронизатора 5 кадровые импульсы Подаются на фильтр кадрового сигнала 6, который выделяет первую гармонику импульсной последовательности. Фазосдвигающая цепочка 7 и первый усилитель 9
5 осуществляют необходимый сдвиг по фазе и усиление входного сигнала, а с выхода первого усилителя 9 сигнал поступает на второй вход фазового детектора 11.
Второй фильтр нижних частот 12 выделяет постоянную составляющую управляющего сигнала по курсу.
Для получения управляющего сигнала по линейному отклонению управляющий сигнал с выхода второго фильтра нижних частот 12 подают на блок коррекции 13,
5 который обеспечивает такой же закон изменения управляющего сигнала от курсового угла, какой имеется на выходе первого фильтра нижних частот 3. Выходной сигнал блока коррекции 13 вычитается из суммарного управляющего сигнала на выходе первого фильтра нижних частот 3 в блоке вычитания 14, на выходе которого имеется только управляющий сигнал, пропорциональный линейному отклонению подвижного объекта от направляющей траектории. На фиг. 2 условно показано формирование управляющего напряжения при левом развороте подвижного объекта (трактора) относительно рядков растений, например свеклы. Три пунктирные линии (три рядка растений) соответствуют серединам двух пар импульсов генератора импульсов 4, которые показаны для /С-й ип-й строк, соответствую. щих рядкам растений. Как видно из фиг. 3 видеоимпульсы /(-и строки, соответствующие рядкам растений, сдвинуты больще относительно середины импульсов генератора импульсов 4, чем импульсы п -и строки. Видеоимпульсы последней (нижней) строки расположены симметрично относительно середины импульсов генератора импульсов 4, т.е. та часть рядков растений, которая находится ближе к трактору, расположена симметрично относительно этих пар импульсов. Управляющее напряжение на выходе временного дискриминатора 2 в начале кадра имеет определенную величину, а в конце кадра - равно нулю. Управляющее напряжение, соответствющее курсовому отклонению, имеется на выходе первого фильтра нижних частот 3 и представляет собой постоянное напряжение положительной полярности- (для заданного отклонения). На фиг. 2 оно показано пунктирной линией. При правом pa3BOpote это напряжение отрицательное, а при отсутствии разворота - равно нулю. На выходе фильтра курсового сигнала 8 выделяется,как было отмечено, первая гармоника этого напряжения, которая при смене разворотов меняет свою фазу на 180°, а амплитуда этой гармоники, как и амплитуда сигнала на выходе временного дискриминатора 2, соответствует углу разворота объекта (трактора). Фазовый детектор 11 сравнивает фазы двух синусоид и формирует положительное или отрицательное нап-ряжение в зависимости от стороны разворота. При отсутствии разворота напряжение на первом входе фазового детектора 11 отсутствует, оно равно также нулю и на выходе первого фильтра нижних частот 3. Фазосдвигающая цепь 7 обеспечивает синфазность (.ил-и противофазность) синусоидальных напряжений на входе фазового детектора 11 Получение независимых сигналов управления, соответствующих линейному отклонению подвижного объекта от направляющей траектории позволяет устанавливать предлагаемое устройство на различные тракторы и самоходные мащины и может обеспечить их нормальную работу при различных скоростях и тяговых нагрузках.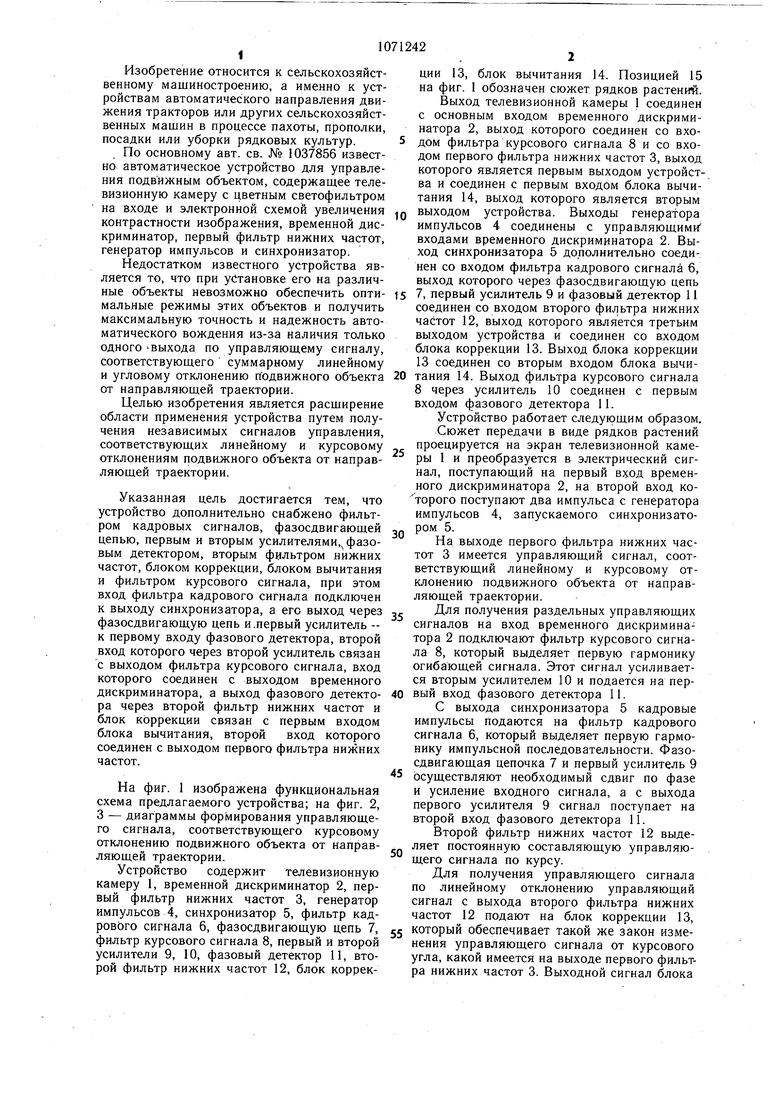
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2019 |
|
RU2713624C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ОБЪЕКТА | 1990 |
|
SU1823773A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
| Формирователь линейно-частотно-модулированных сигналов | 1986 |
|
SU1424112A1 |
| Следящий фильтр фазоманипулированного псевдослучайного сигнала | 1986 |
|
SU1394411A1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| Преобразователь угла поворота вала в код | 1978 |
|
SU771115A2 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2759511C1 |
АВТОМАТИЧЕСКОЕ УСТРОЙСТВО .ДЛЯ УПРАВЛЕНИЯ ПОДВИЖНЫМ ОБЪЕКТОМ по авт., св. № 1037856, отли чающееся тем, что, с целью расширения области применения устройства путем получения независимых сигналов управления, соответствующих линейному и курсовому отклонению подвижного объекта от направляющей траектории, оно дополнительно снаб аг. f жено фильтром кадровых сигналов, фазосдвигающей цепью, первым и вторым усилителями, фазовым детектором, вторым фильтром нижних частот, блоком коррекции, блоком вычитания и фильтром курсового сигнала, при этом вход фильтра кадрового сигнала подключен к выходу синхронизатора, а его выход через фазосдвиг.ающую цепь и первый усилитель - к первому входу фазового детектора, второй вход которого через вторей усилитель связан с выходом фильтра курсового сигнала, вход которого Соединен .с выходом временного дискриминатора, а выход фазового детектора через второй фильтр нижних частот и блок коррекции - с первым входом блока вычитания, второй вход которого соединен с выходом первого фильтра нижних частот.о (Л и. ю to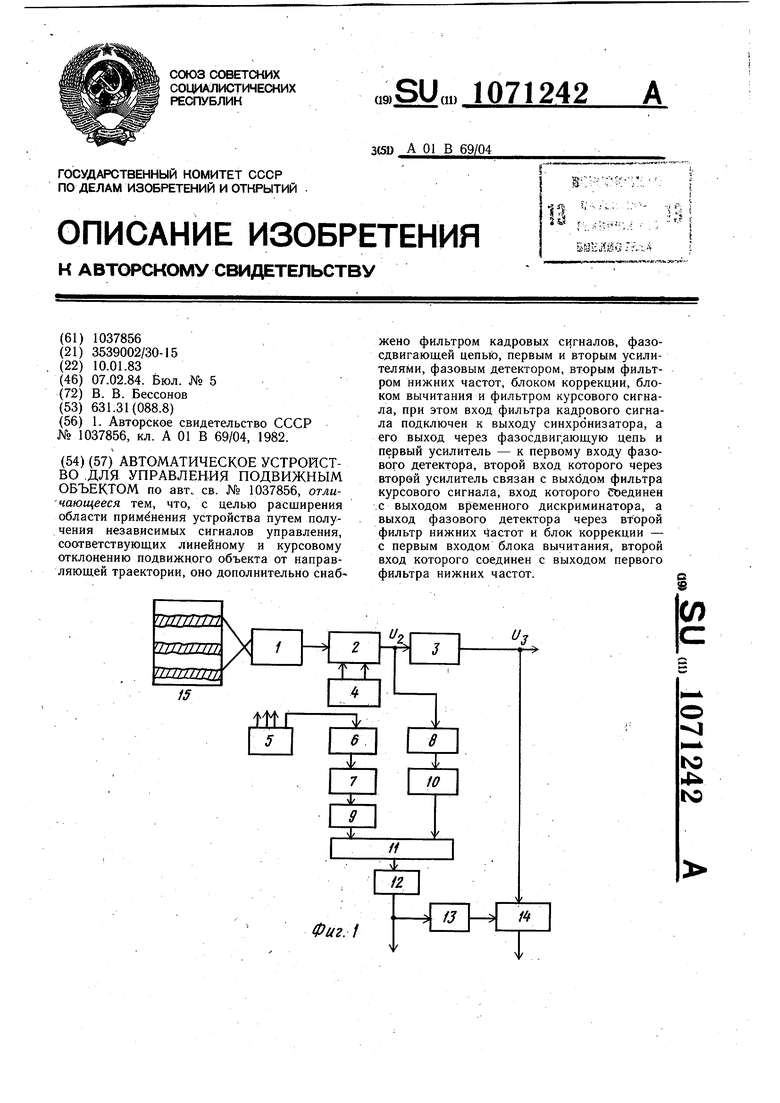
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Автоматическое устройство для управления подвижным объектом | 1980 |
|
SU1037856A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
