Изобретение относится к судостроению, в частности к системам управления турбоагрегатами, работающими на винт регулируемого шага.
Цель изобретения - расширение эксплуатационных возможностей
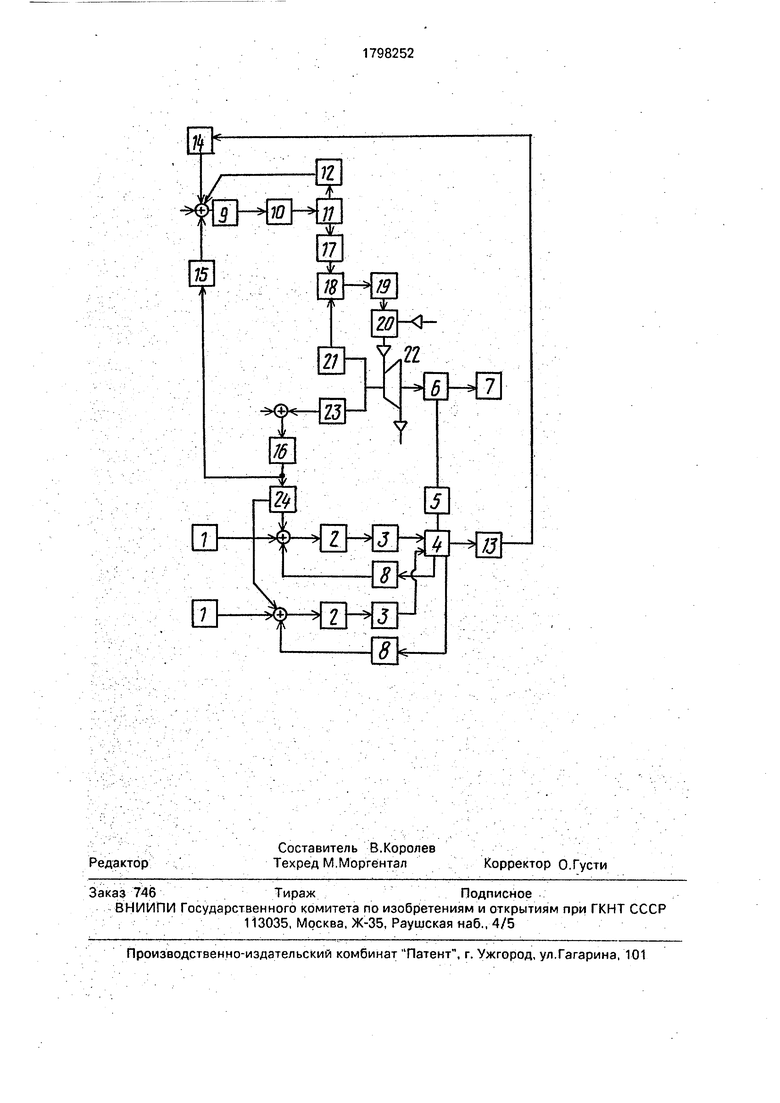
На чертеже показана блок-схема системы, .
Система управления судовым комплек сом турбоагрегат-винт регулируемого шага- валогенератор содержит задатчик 1 шага винта, выход которого через усилитель 2 и электрогидравлический преобразователь 3 блока управления шагом винта соединен с входом привода 4 золотника 5 механизма изменения шага, один выход которого через датчик 8 обратной связи соединен с входом усилителя 2 блока управления шагом, другой - через механизм 6 изменения шага .соединен с винтом регулируемого шага, а третий - через корректор частоты 13 соединен с входом инерционного блока 14; измеритель частоты 16, вход которого соединен с валогенератором 23, а выходы соединены со входом интегрального задатчика 15 и через регулирующее устройство 24 - с входом усилителя 2 блока управления шагом; усилитель 9 блока управления частотой вращения, вход которого соединен с выходами
интегрального задатчика 15, датчика 12 обратной связи блока управления частотой вращения и инерционного блока 14, соединенного с выходом корректора 13 частоты вращения, а выход через электрогидравлический преобразователь 10 блока управления частотой вращения соединен с входом привода 11 задатчика частоты вращения, один выход которого соединен с входом датчика 12 обратной связи, а другой через управляющий золотник 17, регулирующий золотник 18, привод 19 маневрового клапана и маневровый клапан 20 - с турбоагрегатом 22.
Управление режимами работы комплекса осуществляется воздействием на зэдат- чик 1. Электрический сигнал, пропорциональный углу поворота задатчика, поступает на вход усилителя 2. Этот сигнал суммируется с сигналом противопожарной фазы датчика 8 и их разность, усиленная усилителем 2, поступает на электрогидравлический преобразователь 3, преобразуется в перепад давлений, управляющий сервомотором, привода 4. Привод, перемещаясь, поворачивает жестко связанный с ним датчик 8 и корректор 13 частоты вращения. При равенстве нулю разности сигналов задатчика 1 и датчика 8 приел
ч о со
О
ел
ьо
вода 4 останавливается в положении, соответствующем заданному, а на выходе корректора 13 устанавливается сигнал, определяемый выражением
А Пко З Нпзш,
где А Пко - выходной сигнал корректора оборотов;
S - статизм внутреннего контура регулирования частоты вращения турбоагрегата;
Нпзш - положение привода 4 золотника механизма изменения шага.
При этом Нпзш определяется выражением
г
з(1- } ТпЗЩ J,
где Нз -заданный шаг винта;
Тпзш - постоянная времени контура управления положением привода 4 золотника механизма изменения шага.
Перемещение привода 4 вызывает изменение положения золотника 5 механизма изменения шага, входящего в состав гидравлического блока управления шагом, состоящего из золотника 5 и механизма 6, перекладывающего лопасть винта 7. Таким образом, каждому положению привода 4, а следовательно, и зздатчика 1, соответствует вполне определенное положение лопастей винта 7..
Поддержание частоты вращения винта 7 осуществляется с помощью регулятора 20 частоты вращения, корректора 13 частоты вращения с инерционным блоком 14 и интегрального задатчика 15. Уставка регулятора частоты вращения. формируется положением привода 11 задэтчика частоты вращения. При фиксированном положении привода задатчика частоты вращения регулятор поддерживает значение частоты вращения турбоагрегата, соответствующее данному положению. Отклонение частоты вращения преобразуется в ртклонение импульсного давления импульсного насоса 21, жестко связанного с турбоагрегатом. Изменение импульсного давления через регулирующий золотник 18 вызывает перемещение привода 19 и маневрового клапана 20 в направлении изменения расхода пара, препятствующего отклонению частоты вращения турбоагрегата. Для исключения статической ошибки регулирования вводится импульс по положению привода 4 золотника механизма изменения шага.. На входе корректора 13 частоты вращения появляется электрический сигнал, пропорциональный заданному шагу винта, а на выходе формируется квадрат входного сигнала и масштабируется таким образом, чтобы при полном (100%) шаге винта статическая ошибка была равна нулю. Уравнение корректора частоты вращения имеет вид оt
Ang An ко-(Ы Тиб - Тпзш )
где Arig- выходной сигнал инерционного блока;
t - время маневра;
Тиб - постоянная времени инерционного блока по прототипу.
0 Этот сигнал поступает на вход усилителя 9, где суммируется с сигналом противоположной фазы датчика 12 сигнала обратной связи по положению привода задатчика частоты вращения. Усиленный уси5 лителем 9 сигнал поступает на электрогидравлический преобразователь 10, где преобразуется в перепад давлений, управляющий севромотором привода 11 задатчика частоты вращения. Положение при0 вода 11 задатчика частоты вращения меняется и происходит механическое перемещение управляющего золотника 17, которое преобразуется в сигнал, давления, которое через регулирующий золотник 18
5 воздействует на привод 19 маневрового клапана 20. Последний изменяет подвод пара к турбоагрегату до восстановления прежней частоты вращения (до поворота задатчика шага). Из приведенного описания
0 видно, что корректор частоты вращения при изменении режима работы комплекса создает дополнительный импульс, исключающий статическую ошибку. Форсирующее действие корректора 13 частоты вращения,
5 уменьшающее динамическую, ошибку управления частотой вращения, обеспечивается за счет ввода инерционного блока 14. Очевидно, что при изменении сигнала зэдатчика 1 шага винта, изменяется положе0 ние привода 4 золотника изменения шага винта и начинается разворот лопастей винта 7 с некоторым запаздыванием, что объясняется временем севромотора механизма 6 изменения шага. Изменение положения ло5. пастей винта приведет к отклонению частоты вращения турбоагрегата. Тогда регулятор 19 частоты вращения будет воздействовать на маневровый клапан 20. Запаздывание при прохождении сигнала по
0 системе управления оборотами всегда меньше, чем механизм б изменения шага, что позволяет формировать действие регулятора 19 частоты вращения сигналом корректора 13 частоты вращения, изменяя его
5 по определенному закону во времени. Эту функцию выполняет инерционный блок 14, у которого постоянная времени выбирается такой, чтобы сигнал корректора частоты вращения начинал воздействовать на маневровый клапан несколько раньше, чем
будет меняться нагрузка турбоагрегата (разворот лопастей винта).
Таким образом, при изменении режима работы комплекса, корректор частоты вращения воздействует на регулятор в сторону, противоположную ожидаемому изменению частоты раньше, чем происходит это изменение и тем самым исключает динамическую ошибку управления частотой вращения турбоагрегата.
Формула изобретения Система дистанционного автоматического управления судовым комплексом турбоагрегат-винт регулируемого шага-ва- логенератор, содержащая задатчик шага винта, выход которого через усилитель и электрогидравлический преобразователь блока управления шагом винта соединен с входом привода золотника механизма изменения шага, один выход которого через датчик обратной, связи соединен с входом усилителя блока управления шагом, а другой через механизм изменения шага соединен с винтом регулируемого шага, измеритель частоты, вход которого соединен с валогенератором, а выходы соединены с входом интегрального задатчика и через регулирующее устройство - с входом усилителя блока управления шагом, усилитель блока управления частотой вращения, вход которого соединен с выходами интегрального задатчика, датчика обратной связи блока управления частотой вращения и инерционного блока, соединенного с выходом корректора частоты вращения, а выход через элёктрогидравлический преобразователь блока управления частотой вращения соединен с входом привода задатчика частоты вращения, один выход которого соединен с входом датчика обратной связи, а другой через управляющий золотник, регулирующий золотник, привод маневрового клапана и маневровый клапан - с турбогенератором, импульсный масляный насос,
вход которого соединен с турбоагрегатом, а выход-с входом регулирующего золотника, отличающаяся тем, что, с целью расширения эксплуатационных возможностей системы, вход корректора частоты вращения соединен с выходом привода золотника механизма изменения шага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного автоматизированного управления режимами работы комплекса "главный" судовой турбоагрегат-винт регулируемого шага- навешенный генератор | 1977 |
|
SU779179A1 |
| Система ограничения перегрузок судового комплекса турбоагрегат-винт регулируемого шага-валогенератор | 1990 |
|
SU1775327A1 |
| Устройство управления судовым комплексом турбоагрегат-винт регулируемого шага-валогенератор | 1988 |
|
SU1562234A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО | 1973 |
|
SU383651A1 |
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1980 |
|
SU903573A1 |
| Система управления судовым турбоагрегатом с винтом регулируемого шага | 1982 |
|
SU1071778A1 |
| Устройство для управления судовым турбоагрегатом с винтом регулируемого шага | 1984 |
|
SU1183418A1 |
| Устройство дистанционного автоматизированного управления транспортной паровой турбиной | 1974 |
|
SU528229A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Система автоматического управления судовой турбиной | 1979 |
|
SU985329A1 |
Сущность изобретения: в отличие от существующей схемы вход корректора частоты вращения соединен не с задатчиком шага винта, а с выходом привода золотника механизма изменения шага винта, что расширяет эксплуатационные возможности системы без ее усложнения. 1 ил.
| Устройство управления судовым комплексом турбоагрегат-винт регулируемого шага-валогенератор | 1988 |
|
SU1562234A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
