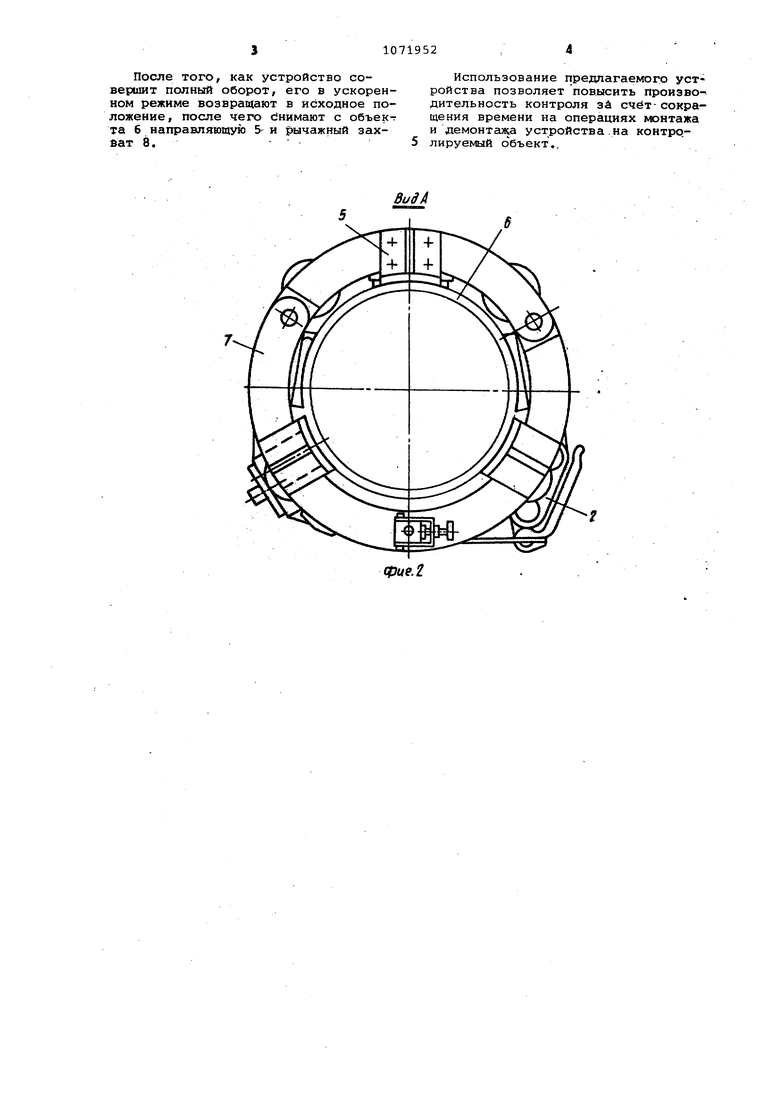
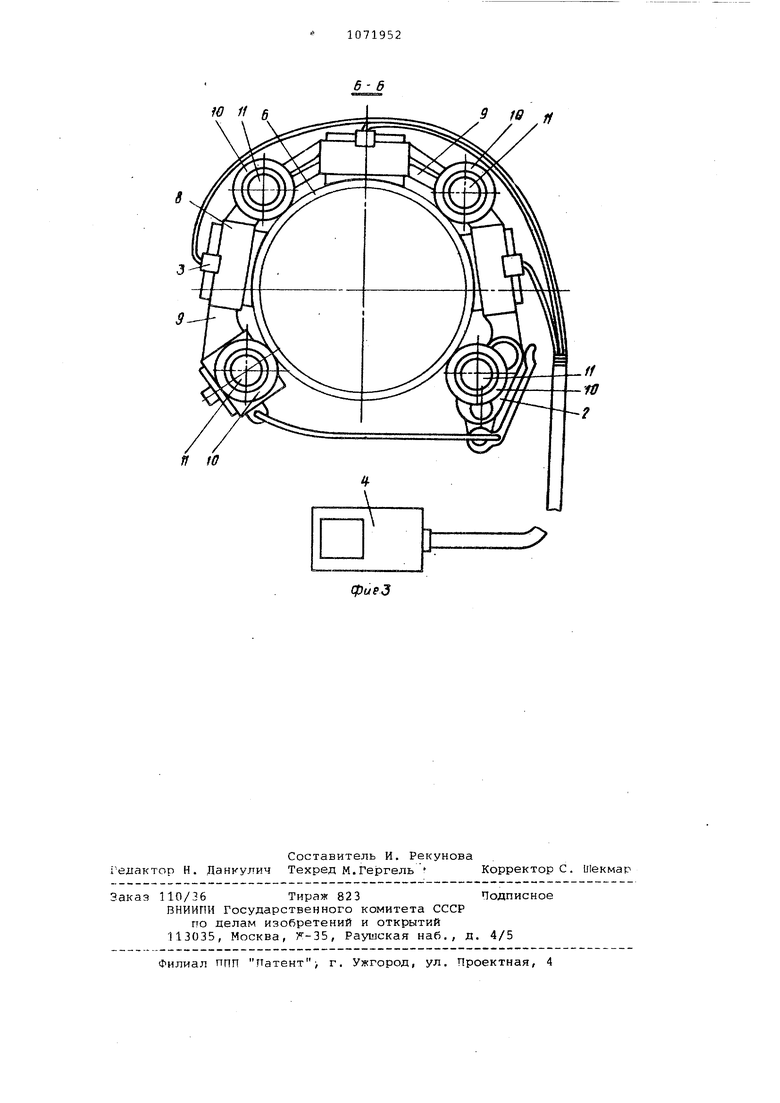
Изобретение относится к дефектескопим, а именно к установкам, с помощью которых осуществляется нераэрушающий контроль за состоянием конструкционного материала объектов цилиндрической формы. Известно устройство для контрюля за состоянием материала неподвижных труб, содержащее каретку с установленными на ней преобразователями дефектоскопа, направляющую цепЬ со звездочкой, приводной ремень и винтовой механизм для пе земещения каретки вокруг контролируемой трубы 1 Недостатком данного устройства является невозможность проведения контроля объектов цилиндрической формы, расположенных вертикально, а также сложность крепления устройства на контролируемый объект, так как необходимо одновременно фиксировать направляющую цепь и приводной ремень, что в свою очередь не позволяет повысить производительность контроля. Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для дистанционного контроля -и сигна лизации состояйия материала объектов цилиндрической формы, содержаще . каретку с приводом, размещенные на ней преобразователи дефектоскопа, выходы которых соединены с блоком обработки и регистрации сигналов, и предназначенную для охйата объект /направляющую с элементами фиксации. Направляющая устройства выполнена в виде винтовой цилиндрическяй пружины, а каретка - в виде установлен на четырех катках тележки 123 . Недостатком известного устройств является также сложность крепления его на контролируемом объекте, что снижает производительность контроля Целью изобретения является повышение производительности контроля. Эта цель достигается тем, что в устройстве для дистанционного контроля и сигнализации состояния материала объектов цилиндрической формы, содержащем каретку с приводом, размещенные на ней преобразователи дефектоскопа, выходы которых соединены с блоком обработки и регистрации сигналов, и предназначенную для охвата объекта направляющую с элементами фиксации, направляющая выполнена в виде разъемного ферромагнитного фланца, каретка выполнена в виде многозвенного рычажного захвата, звенья которого связаны между собой шарнирс1ми в виде роликов, служащих для взаимодействия каретки с объектом, а в торцах роликов закреплены постоянные магниты, взаимо действующие с фланцем. . На фиг. 1 показано устройство, общий вид; на фиг.. 2 - вид А на фиг. I; на фиг. 3 - сечение Б-Б на фиг. 1. Устройство состоит из каретки 1 с приводом 2, размещенных на какетке 1 преобразователей 3, выходы которых соединены с блоком 4 обработки и регистрации сигналов, направляющей 5 с элементами фиксации (не показаны), которая охватывает контролиру мый объект 6, при этом направляющая 5 выполнена в виде разъемного ферромагнитного фланца 7, каретка 1 выполнена в виде многозвенного рычажного захвата 8, звенья 9 которого связаны между собой шарнирами в виде роликов 10, служащих для взаимодействия каретки 1 с объектом 6, а в торцах роликов 10 закреплены постоянные магниты 11, взаимодействующие с фланцем 7. Устройство работает следующим образом. На контролируемый объект б (трубу | устанавливают направляющую 5, которая выполнена в виде разъемного ферромагнитного фланца 7, и жестко ее закрепляют известным способом элементами фиксации, Затем на контролируемый объект 6 устанавливают каретку 1, выполненную в виде мнсэгозвенного рычажного захвата 8, взвеньях 9 которого установлены преобразователи 3 дефектоскопа , и привод 2, при этом должна быть обеспечена возможность вращения захвата 8 вокруг контролируемого объекта б так, чтобы постоянные магниты 11, закрепленные в торцах роликов 10, контактировали с торцовой ферромагнитной поверхностью фланца 7. Соединяют выходы преобразоватев лей 3 с блоком 4 обработки и регистрации сигналов. Далее включают привод 2, который приводит в движение ролики 10, и вся система приходит в движение, при этом каретка 1, выпол-ненная в виде многозвенного рычажного захвата 8 с установленными нанем преобразователями 3 и роликами 10, вращается вокруг контролируемо- го объекта б но строго заданной траектории , так как осуществляется постоянное контактирование постоянных магнитов 11с торцом фланца 7 (его ферромагнитной поверхностью), поэтому устройство не имеет возможности перемещаться вдоль оси объекта б. В процессе вращения устройства преобразователи 3 дефектоскопа фиксируют Изменения состояния материала контролируемого объекта 6 и выдают сигналы в блок 4 обработки и регистрации.
После того, как устройство совершит полный оборот, его в ускоренном режиме возвращают в исходное положение, после чего «Снимают с объек-г та б направляющую 5- и рычажный захват 8.
Использование предлагаемого устройства позволяет пов.ысить производительность контроля зА счёт-сокращения времени на операциях монтажа и демонтажа устройства.на контрюлируемый объект.,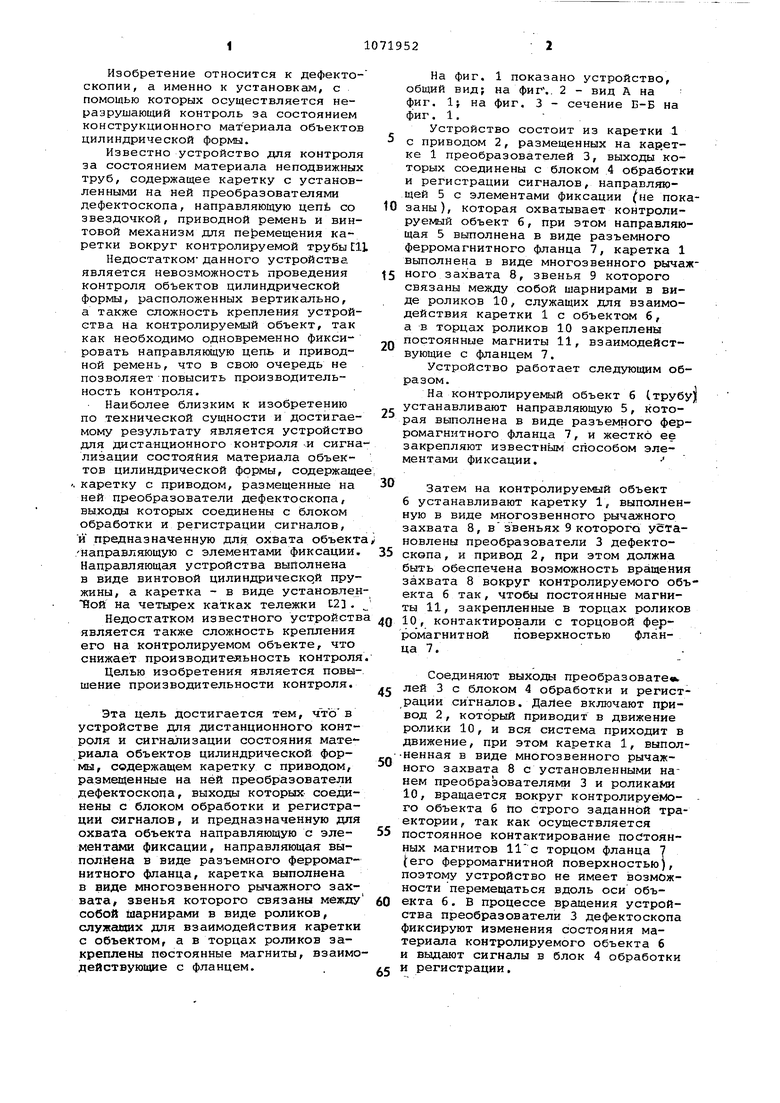
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ СВАРНЫХ СОЕДИНЕНИЙ ТРУБ | 1987 |
|
SU1445396A1 |
| Устройство для ультразвукового контроля вертикально расположенных корпусов энергетического оборудования | 1988 |
|
SU1563395A1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| Установка для дефектоскопии внутренней поверхности труб | 1982 |
|
SU1067423A1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ МАГНИТНОЙ ДЕФЕКТОСКОПИИ СТЕНОК СТАЛЬНЫХ ТРУБОПРОВОДОВ | 1993 |
|
RU2102737C1 |
| СПОСОБ МАГНИТНОЙ ДЕФЕКТОСКОПИИ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1997 |
|
RU2133032C1 |
| МАГНИТНЫЙ ДЕФЕКТОСКОП | 2005 |
|
RU2295721C2 |
| Устройство для контроля трубопроводов | 1984 |
|
SU1317356A1 |
| Намагничивающее устройство дефектоскопа | 2019 |
|
RU2715473C1 |
| УСТРОЙСТВО ДЛЯ ВИХРЕТОКО-МАГНИТНОЙ ДЕФЕКТОСКОПИИ ФЕРРОМАГНИТНЫХ ОБЪЕКТОВ | 2014 |
|
RU2566416C1 |

Ю 11 6
9 fe ff
