Изобретение относится к устройствам для ультразвукового контроля и может быть использовано при контроле корпусов энергетического оборудования о
Целью изобретения является повышение надежности контроля за счет обеспечения точности ориентации ультразвукового преобразователя о
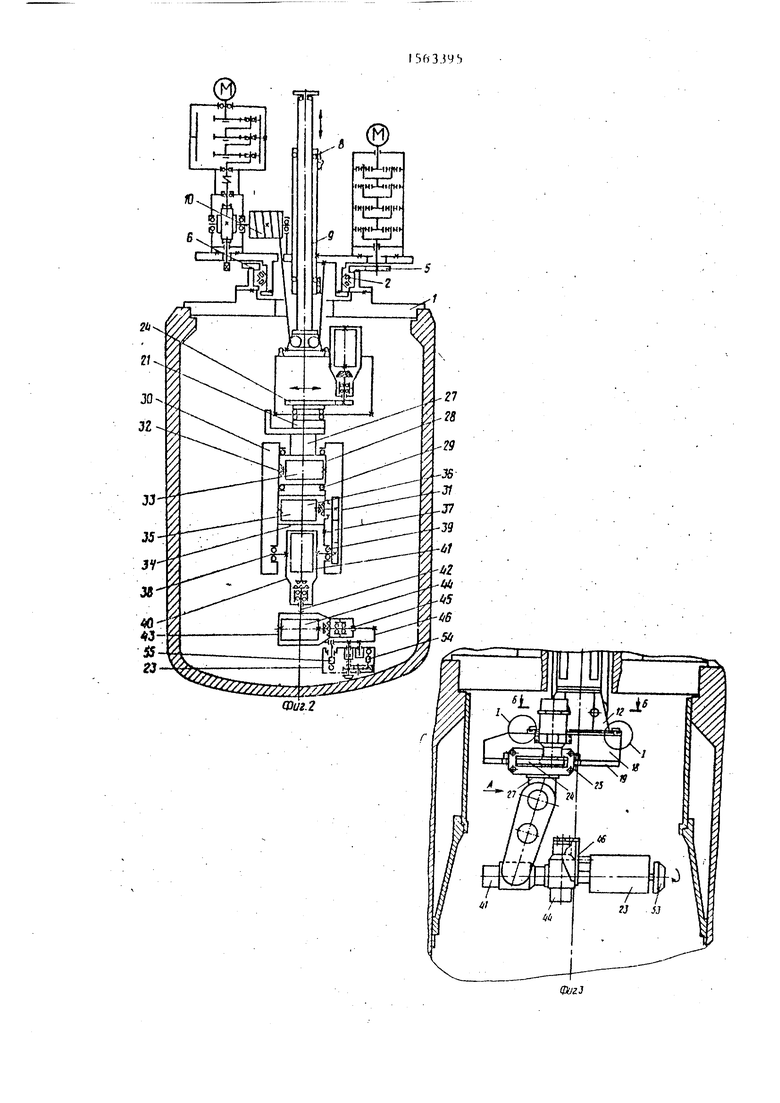
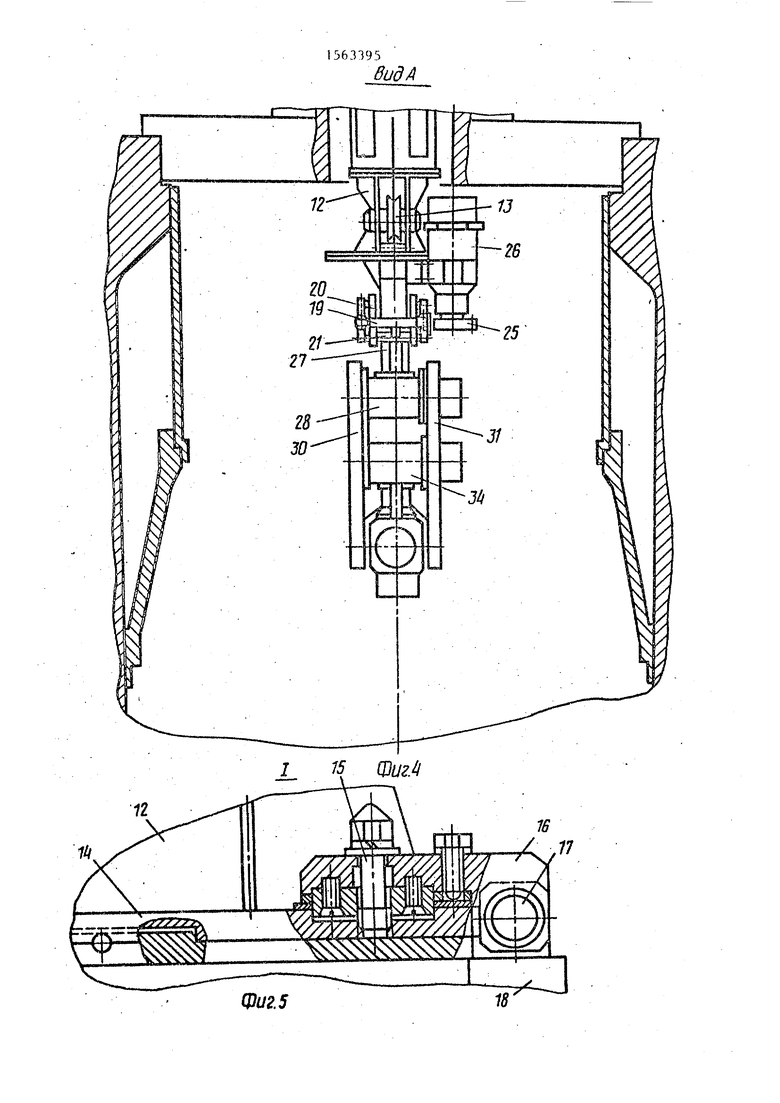
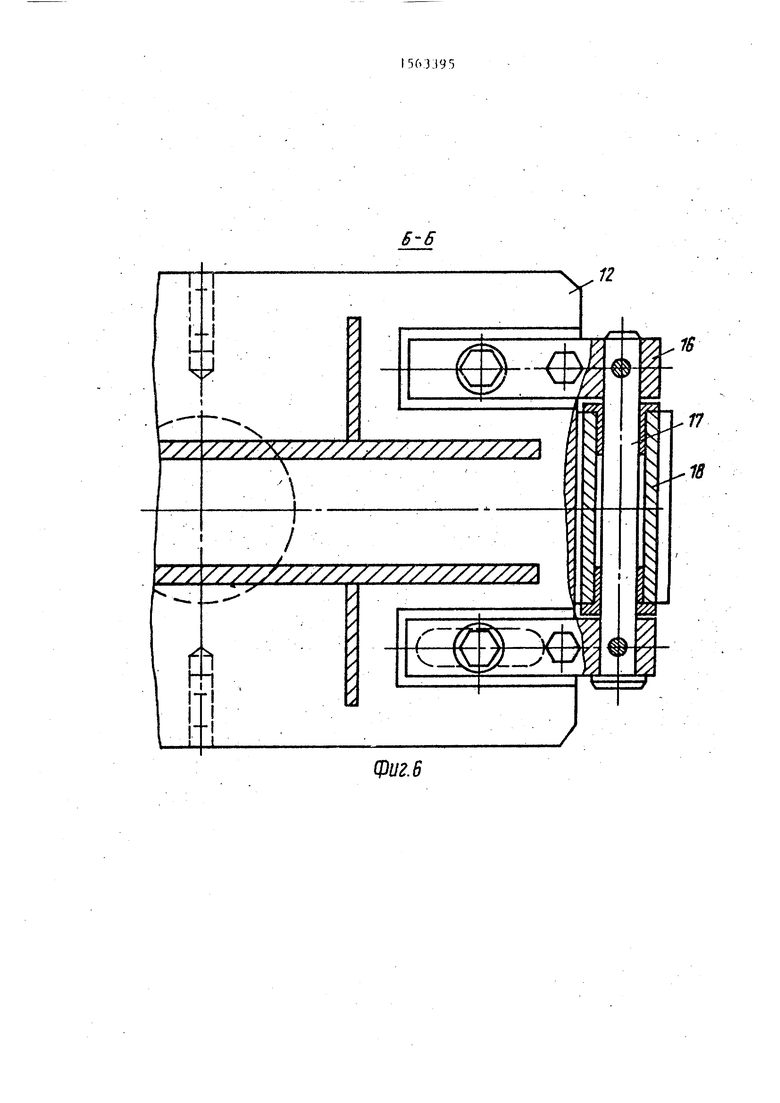
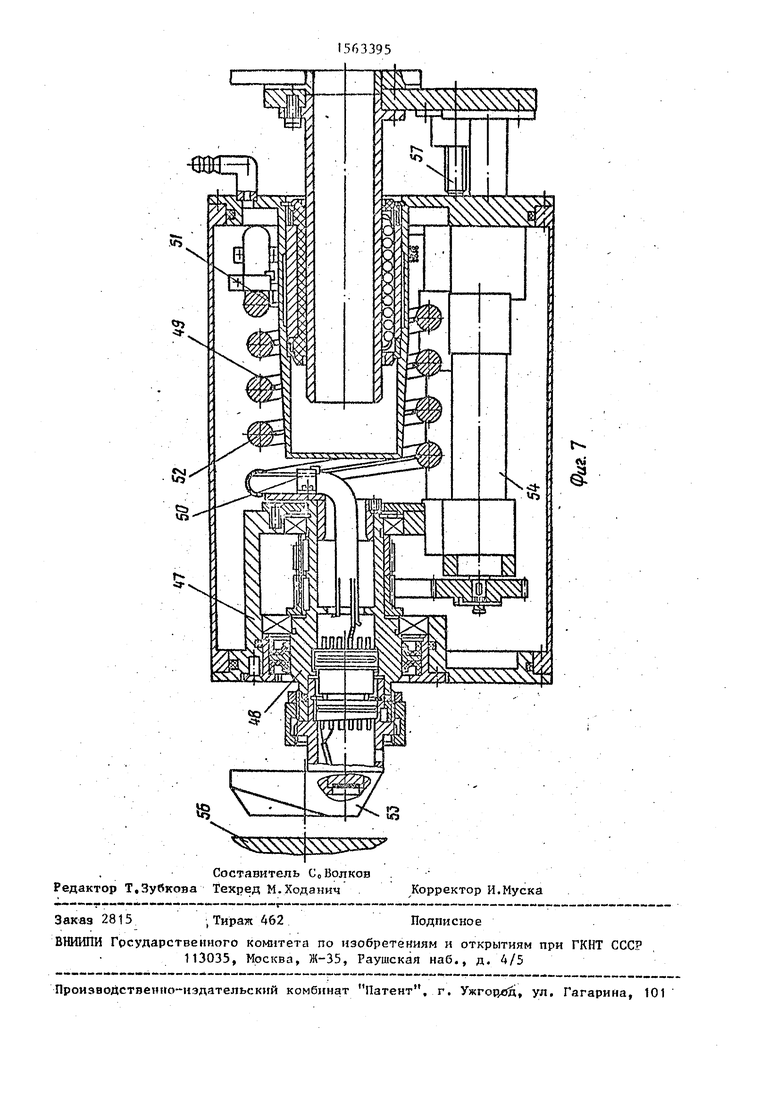
На фиг.1 схематично изображено предлагаемое устройство, установленное на контролируемом, изделии, общий вид; на фиг,2 - кинематическая схема устройства; на фиг.З - предлагаемое устройство в крайнем положении,общий вид; на фиг04 - вид А на фиг.З; на фиг05 - узел 1 на фиг.З; на фиг.6 - сечение Б-Б на фиг.З; на на фиг.7 - ультразвуковая головка, общий вид, разрез о
Предлагаемое устройство содержит центрирующее опорное кольцо I с опорным подшипником 2 и с поворотной плитой 3, на которой установлен привод 4 поворота. Выходная шестерня 5 привода 4 поворота кинематически связана с неподвижным зубчатым коле- сом 6, жестко связанным с опорным кольцом 10 Зубчатое колесо 6 снабжено дополнительным датчиком (на фиг.
Си
Cfe
ОЭ
Ьэ
СЈ СЛ
to
fS
20
е показан) для отсчета угла пово- отас Опорное кольцо 1 снабжено сменм MI r коньцамп (на фиг, не показаны) ля обеспечения контроля соответст- ующих диаметров контролируемых корусов,,
Поворотная плита 3 жестко связана втулкой 7, п направляющих роликах 8 которой установлена вертикальная танга Q с возможностью поступатель- noro перемещения от механизма вертиального перемещения, состоящего из приводной лебедки 10 с тросом 11, смонтированной на поворотной плите 3. На штанге 9 установлена рейка (на фиг„ не показана), находящаяся в зацеплении также с отсчстным узлом (на фиг„не покатано).,
К штанге 9 прикреплена подвеска 12, внутри конторой установлены блоки 13 через которые пропущен трос 11 механизма подъема и опускания устройства, К торцовой поверхности 14 подвески 12 на болтах 15 крепят диамет- 25 рапьно расположенные проушины 16, в которых на осях 17 подвешена рама 18 с возможностью разворота в вертикальной плоскости и фиксации ее болтами 15„ Торцовая поверхность рамы 18 выполнена в виде прямоугольной направляющей 19, на которой с возможностью перемещения в радиальном направлении под торцовой поверхностью 14 штанги 9 установлен на роликах 20 подвижный узел, выполненный в виде каретки 21, несущей многозвенный шарнирно-ры- чажный механизм 22 управления с ультразвуковой головкой 23, Шарнирно-ры чяжный механизм четыре степе ни свободы. На каретке 21 жестко закреплена рейка 24, кинематически связанная через зубчатое копесо 25 с приводом 26 ее перемещения, установленным на раме 180 Многозвенный шар- 45 нирно-рычажный механизм 22 управления включает кронштейн 27, установленный на каретке 21 подвижного узла и жестко связанный с ним стакан . 28 с горизонтальной осью0 На стакане 28 с возможностью поворота в вертикальной плоскости на подшипниках 29 установлены щеки 30 и 31, одна из которых (30 ) через муфту 32 связана с приводом )3 поворота щек 30 и 31, размещенным внутри стакана 28, Щеки 30 и 31 жестко связаны между собой втулкой 34, внутри которой размещен .привод 35, который через муфту 36 и
30
35
40
50
55
o
S
0
5 45
0
35
40
50
55
зубчатую передачу 37 кинематически связан с валом 38, Установленным с возможностью поворота на подшипниках 39 в щеках 30 и 31„ На валу 38 жестко закреплен корпус 40, внутри рого размещен привод 31 с выходным валом 42., перпендикулярным валу 38 и несущим дополнительный корпус 43 с размещенным в нем приводом 44, Вы ходной вал 45 привода 44 перпендикулярен валу 42 и на нем жестко закреплен Г-образпый кронштейн 46, который является последним звеном шар- нирно -рычажного механизма управления.
На кронштейне 46 с возможностью возвратно-постунательного перемещения установлен корпус 47 ультразву- ковой головки,, В корпусе 47 размещена вращающаяся обойма 48 с демпфером, выполненным в виде пружины 49 кручения, один конец 50 которой предварительно заневолеи на угол 180° на вращающейся обойме 48, другой конец 51 закреплен на корпусе 47, На демпфере вдоль витков пружины 49 уложен кабель 52, связанный с источником питания (на фиг0 не показан). На обойме 48 по центру установлен пье- зопреобразователь 53, кабелем 52 подсоединенный ,к источнику -питания и к аппаратуре управления (на фиг, не показаны),
В корпусе 47 расположены привод 54 сканирования и привод 55 слежения за расстоянием от преобразователя 53 до поверхности контролируемого корпуса 56 с винтовым механизмом 57, Привода 54 и 55 имеют датчики отсчета и конечные выключатели (на фиг, не показаны)о В опорном кольце 1 выполнено окно 580
Предлагаемое устройство работает следующим образом.
Устанавливают устройство центрирующим опорным кольцом 1 на контролируемый корпус 56. Каретку 21 и многозвенный шарнирно-рычажный механизм 22 управления с ультразвуковой головкой 23 устанавливают на прямоугольных направляющих 19 торцовок поверхности рамы 18 в исходное положение, так что их габариты в радиальном направлении меньше диаметра горловины 59« Для обеспечения доставки ультразвуковой головки 23 в зону контролируемой поверхности корпуса 56 соответствующего диаметра приводной ле - белкой 10 и с помощью троса II, оги-(
бающего блоки 1 3 подвески 12, перемещают на длину хода вертикальную штангу 9 в направляющих роликах 8 втулки 7. Отсчет глубины хода штанги 9 осуществляют рейкой (на фиг,не показана), находящейся в зацеплении с датчиком (на фиг0 не показан) от- счетного узла (на фиг, не показано). Для установки пьеэопреобразователя 53 но нормали к контролируемой поверхности корпуса 56 приводом 33 через муфту 32 осуществляют поворот щеки 30 на подшипниках 29 относительно
на неподвижном корпусе 47„ При этом в начальный момент движения ил угле 180° пружина 49 через заневоленнып конец 50 помогает природу 5А вращать преобразователь 53, а на остальные 182° затормаживает, выполняя роль демпфера При вращении в обратном направлении происходит то же самое. В ig процессе контроля при изменении расстояния между пьезопреобразователем 53 и контролируемым корпусом 56 сигнал с пьезопреобразователя 53 поступает в аппаратуру управления (на стакана 28 и кронштейна 27 многозвен- фиг, не показана) и от нее на привод но го шарпнрно-рычажного механизма 22. 55, который сообщает через винтовой Щека 30 через втулку 34 передает вра- механизм 57 вотвратпо-поступатель- щение на щеку 310 Приводом 35 через ное перемещение ультразвуковой го- муфту 36 и зубчатую передачу 37 вра- ловке 23. В случае отклонения оси щают вал 38 я подшипниках 39, установ-20 пьезопреобразователя 53 от нормали ленных в щеках 30 и 31, соединенных к контролируемой поверхности корпу- с корпусом 40 0 Привод 41 через выход- са 56 сигнал также от пьезопреобразо
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ультразвукового контроля ферромагнитных поверхностей изделий | 1983 |
|
SU1112893A1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ РЕЛЬСОВ | 2001 |
|
RU2184372C1 |
| Устройство для позиционирования приборов контроля | 1981 |
|
SU947754A1 |
| Искательная головка к ультразвуковому дефектоскопу | 1972 |
|
SU785736A1 |
| Устройство для ультразвукового контроля изделий | 1982 |
|
SU1052995A1 |
| Устройство для ультразвукового контроля сварных швов труб | 1984 |
|
SU1165979A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| ИСКАТЕЛЬНАЯ ГОЛОВКА К УЛЬТРАЗВУКОВОМУ ДЕФЕКТОСКОПУ | 1970 |
|
SU275489A1 |
| Устройство для ультразвукового контроля изделий | 1983 |
|
SU1147978A1 |
| Устройство для ультразвукового контроля вертикальных технологических каналов изделий | 1985 |
|
SU1421083A1 |
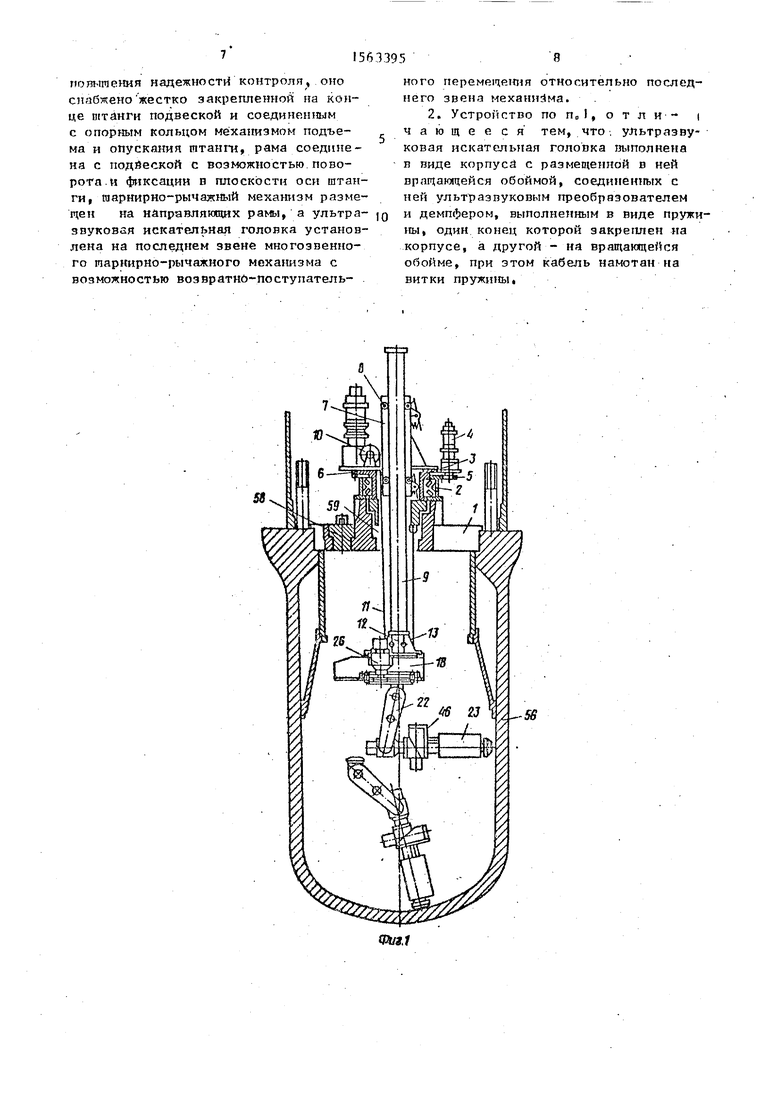
Изобретение относится к устройствам для ультразвукового контроля. Целью изобретения является повышение надежности контроля„ Устройство содержит центрирующее опорное-кольцо, на котором с возможностью подъема и поворота закреплена штанга. К штанге снизу прикреплена подвеска, к которой с возможностью поворота и фиксации прикреплена-рама с направляющими, на которой установлен шарнирно-рычажный многозвенный механизм, на последнем звене которого закреплен ультразвуковой преобразователь Перед контролем при опускании преобразователя в контролируемый корпус через его узкую горловину ослабляется фиксация рамы, л звенья шарнирно-рычажного механизма вытягивают в линию, что позволяет ввести преобразователь с многозвенным гаарнирно-рычажным механизмом внутрь контролируемого корпуса. Подводя ультразвуковой преобразователь в требуемую точку контроля по нормали к поверхности, осуществляют контроль перемещением по раме шарнирно-рычажного механизма и ориентацией звеньев механизма 1 з„п, ф-лы, 7 ило i (Л С
ной вал 42 осуществляет разворот корпуса 43 в плоскости, перпендикулярной плоскости поворота корпуса 40, При- вод 44 через выходной вап 45 осуществляет поворот Г-образного кронштейна 46 с корпусом 47 ультразвуковой головки 23 в плоскости, перпендикулярной плоскости поворота корпуса 43, Пе ремещение в радиальном направлении осуществляют приводом 26, который через зубчатое колесо 25 и рейку 24 перемещает каретку 21 с роликами 20 в радиальном направлении вдоль прямоугольной направляющей 19 рамы 18 под торцовой поверхностью штанги 9, выполненной в виде подвески 12, при. этом производят отсчет перемещения с помощью датчиков (на фиг. не показа- ны) Приводом 4 выходную шестерню 5 обкатывают относительно неподвижного зубчатого колеса 6 и передают движение на поворотную плиту 3, осуществляя разворот ее на 360° на опорном подшипнике 2 вместе с вертикальной штангой 9, затем приводной ле4- бедкой 10 вертикальную штангу 9 перемещают вверх на шаг контроля и ре
версивным движением привода 4 поворотную плиту 3 поворачивают на угол 360°в обратном направлениио При этом привод 54 сканирования обеспечивает возвратно-в ращательное (реверсивное) движение обоймы 48 на угол 362° с пьезопреобраэователем 53 и закручивает и раскручивает пружину 49 с кабелем 52 через один ее конец 50, второй конец 51 которой закреплен
35
25 ,о
40
45
50
5
вателя 53 поступает на аппаратуру управления, которая через приводы 33, 35, 41, 44 корректирует положение ультразвуковой головки 23 перемещениями многозвенного шарнирно-рычаж- ного механизма 22,
I
При аварийной ситуации приводно лебедкой 10 через трос 11 поднимают штангу 9 вверх (см,фиг.3) и через окно 58 отвинчивают болты 15 с одной стороны нижней торцовой поверхности 14 подвески 12, и под собственным весом рама 18 получает разворот вокруг оси 17, установленной в диаметрально противоположных проушинах 16. Таким образом сокращают габариты в радиальном направлении, обеспечивая перемещение многозвенного шариирно- рычажного механизма 22 с ультразвуковой головки 23 через узкую горловину 59 контролируемого корпуса 56,
Формула изобретения
1, Устройство для ультразвукового контроля вертикально расположенных корпусов энергетического оборудования, содержащее опорное кольцо, соосно размещенную в нем штангу, установленную на штанге раму, закрепленные на ней направляющие, размещенный на направляющих многозвенный шарнир- но-рычажный механизм и закрепленную на нем ультразвуковую искательную головку, с кабелем, отличающееся тем, что, с целью
повышения надежности контроля, оно снабжено жестко закрепленной на конце штанги подвеской и соединенным с опорным кольцом механизмом подъема и опускания гатаиги, рама соединена с подйеской с возможностью поворота и фиксации в плоскости оси штанги, гаарнирно-рычажный механизм размещен на направляющих рамы, а ультра- звуковая искательная головка установлена на последнем звене многозвенного тарнирно-рычажного механизма с возможностью возвратнб-поступательного перемещения относительно последнего звена механизма.
J з9 гпф
veng
set. с 951
LT1
c
k
I 4
X
/У///У7
777777771
K NkVbs
$(777
LVWWXXNJK VV VI
а И
| Патент QUA К 4311556, кп„ С 01 N 29/04, 1977„ Патент США № 4149932, кл0 G 01 N 29/04, 1979. |
