того функционального преобразователя, выход которого подключен к второму входу второго сумматора, выход последнего соединен с вторым входом первого делителя напряжения, выходкоторого подключен к первому входу седьмого сумматора/ выход последнего является первым выходом устройства, вторым выходом которого является выход второго сумматора, выход первого сумматора является третьим выходом устройства, выход датчика местного угла атаки
соединен с вторым входом пятого функционального преобразователя, выход которого подключен к первому входу восьмого сумматора, выход последнего через третий ключ соединен с входом третьего интегратора, выходкоторого подключен к третьему входу пятого сумматора и к вторым входам седьмого и восьмого сумматоров, выход третьего сумматора соединен с вторым входом второго делителя напряжения .
| название | год | авторы | номер документа |
|---|---|---|---|
| Вычислитель угла атаки | 1983 |
|
SU1129630A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2332634C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА ТОПЛИВА САМОЛЕТА | 2008 |
|
RU2377507C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2351889C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2012 |
|
RU2537201C2 |
| СИСТЕМА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО МАЛОРАЗМЕРНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2042170C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2163732C1 |
| УСТРОЙСТВО ДЛЯ ПОЛЕТНОГО КОНТРОЛЯ ВЕСА НАГРУЗКИ САМОЛЕТА | 2003 |
|
RU2260179C1 |
| СИСТЕМА ДЛЯ ПРОГНОЗИРОВАНИЯ РЕЗУЛЬТАТОВ НАТУРНЫХ ИСПЫТАНИЙ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2160927C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |

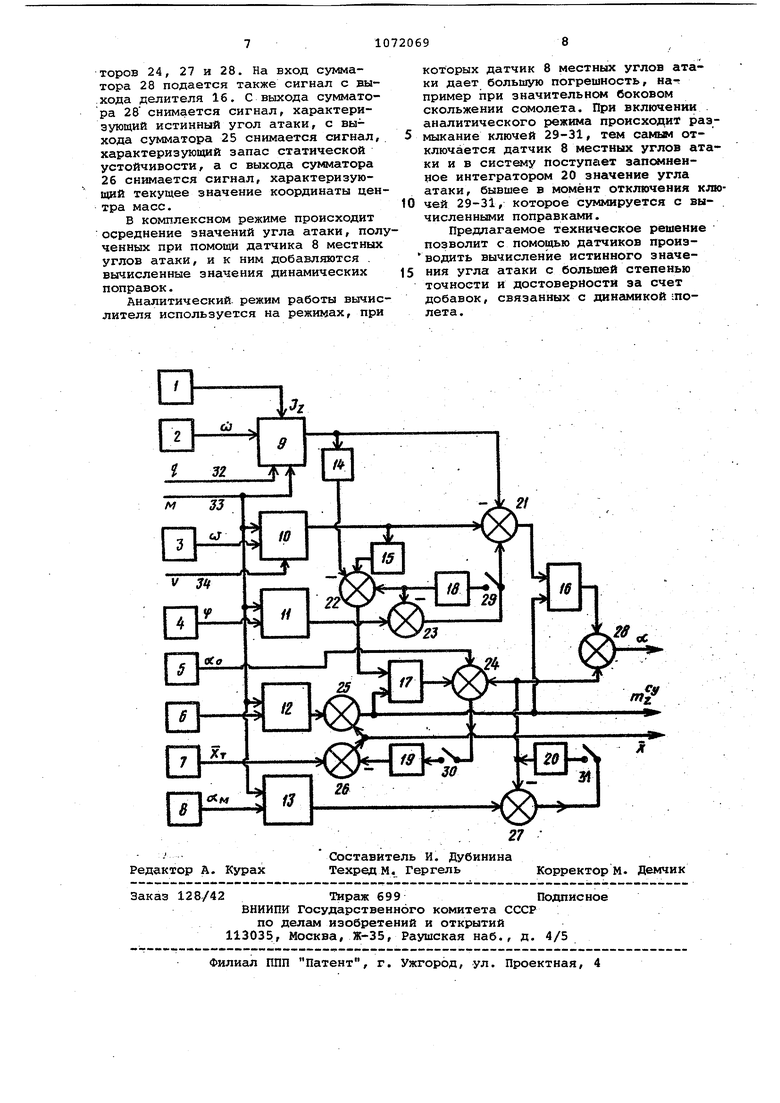
Изобретение относится к автомати ческому управлению и может быть использовано в системе автоматическог управления движущимся объектом, например самолетом. Известен вычислитель угла атаки, предназначенный для выполнения вычис лений с использованием сумматоров, м жителей/ делителей, фильтров и функ циональных преобразователей l . Недостатком вычислителя является то, что точность вычисления углов а ки в большой мере зависит от точности измерения расхода горючего борт выми средствами, Наиболее близким по технической сущности к предлагаемому является вычислитель угла атаки,состоящий из вычислителя воздушных параметров, трех акселерометров, вычислителя угла скольжения, делителя, восьми множителей, двух синусно-косинусных преобразователей, трех сумматоров, двух масштабных множителей и дифференцирующего элемента, причем выходы первого, второго и третьего акселерометров подключены соответствен но, к первьп входам первого, второго итретьего множителей, выход вычислителя угла скольжения соединен с входом первого синусно косинусного преобразователя/ первый выход которого подключен к вторым входам второ го и третьего множителей, а второй выход синусно-косинусного преобразователя соединен с вторым входом первого множителя, выход которого подкл чен к первому входу первого сумматора, выход последнего соединен с первым входом второго сумматора, выход которого подключен к первому входу четвертого множителя, выкод последнего соединен с входом первого масштабного множителя, выход которого является выходом устройства и подключен к входу второго синусно-косинусного преобразователя, первый выко последнего соединен с первыми входами пятого и шестого множителей, а второй выход второго синусно-косинусного преобразователя подключен к первым входам седьмого и восьмого множителя выход второго множителя соединен с вторыми входами пятого и седьмого множителей, выход третьего множителя подключен к вторым входам шестого и восьмого множителей, выходы пятого и восьмого множителей соединены соответственно с вторым и третьим входами первого сумматора, а выхода шестого и седьмого множителей подключены соответственно к первснлу и второму входам третьего сумматора, выход которого соединен с вторым входом четвертого множителя, первый выход вычислителя воздушных параметров подключен к первому входу делителя и входу дифференцирующего элемента, выход которого соединен с третьим входом второго сумматора, второй ВЫХОД вычислителя воздушных параметров подключен к второму входу делителя, выход которого через второй масштабный множитель соединен с четвертым входом второго сумматора. Отличительной особенностью известного вычислителя является предварительное вычисление текущей массы самолета с использованием зависимости вида Cu-oc-j + cjf-cp tn , «у-Я-S ot Ч где Cjj и Су - производные коэффициента подъемной силы по углу атаки и отклонению руля высоты; QU - нормальное ускорение самолета;Ч - угол отклонения руля высоты; «LI - угол атаки, измеренный интегральным способом; -скоростной напор -площадь характерного с чения. . Инерциальный угол атаки имеет по грешность . вызванную возмущениями дв жения самолета турбулентностью возду ного потока 2 . Поэтому сигнал мас сы, измеренный таким образом, пропу кают через фильтр низкой частоты, за тем по вычисленному значению массы производят вычисление истинного угла атаки et известным способом /m-ou (О i - v Недостатком известной схемы вычисления является зависимость точности вычисления массы от точности put и рЧ . определения V- у и U U , Цель изобретения - повышение точности вычислений угла атаки и рас ширение функциональных возможностей вычислителя за счет одновременного вычисления координаты положения цент ра масс и запаса статическ:ой устойчивости движущегося объекта. Указанная цель достигается тем, что в вычислитель угла атаки, содержащий три сумматора и первый делитель напряжения, причем выход первого сумматора подключен к первому входу второго сумматора, введены задатчик момента инерции объекта относительно поперечной оси, датчик углового ускорения, датчик угловой скорости, датчик отклонения руля высоты, задатчик балансировочного угла атаки, датчик положения закрылок, задатчик балансировочного значения координаты положения центра масс, датчик местного угла атаки, пять функциональных преобразователей, два фильтра низкой частоты, второй делитель напряжения, три интегратора, пять сумматоров/ три ключ причем выходы задатчика момента инер ции объекта относительно поперечной оси и датчика углового ускорения под ключены соответственно к первому и второму входам первого функционального преобразователя, третий и четвертый входы которого являются соответственно входом задания скоростного напора и входом задания числа Маха устройства, вход задания числа Маха соединен с первыми входами второго, третьего, четвертого и пятого функциональных преобразователей, выход первого функционального преобразователя подключен к первому входу третьего сумматора и через первый фильтр низких частот - к первому вхо ду четвертого сумматора, выход которого соединен с первым входом первог делителя напряжения, выход последнег подключен к первому входу пятого сум :матора, выход которого через первый ;ключ соединен с входом первого интегратора, выход последнего подключен к первому входу первого сумматора, второй вход которого соединен с выходом задатчика балансировочного значения координаты положения центра масс, выход датчика угловой скорости подключен к второму входу второго функционального преобразователя, третий вход которого является входом задания скорости движения устройства, выход второго функционального преобразователя соединен с вторым входом третье-; го сумматора и через второй фильтр низких частот подключен к второму входу четвертого сумматора, выход датчика отклонения руля высоты соединен с вторым входом третьего функционального преобразователя, выход которого подключен к первому входу . шестого сумматора, выход которого соединен с третьим входом третьего сумматора и через второй ключ подключен к входу второго интегратора, выход которого соединен с третьим входом четвертого сумматора и вторьдал входом шестого сумматора, выход задатчи ка балансировочногс угла атаки подключен К второму входу пятого сумматора, выход датчика положения закрыт лок соединен с вторым входом четвертого функционального преобразователя, выход которого подключен к второму входу второго сукянатора, выход последнего соединен с вторим входом первого делителя напряжения, выход кототорого подключен к первому входу седьмого сумматора, выход последнего является первым выходом устройства, вторым выходом которого являенся выход второго сумматора, ввлход первого сумматора является третьим выходом устройства, выход датчика местного угла атаки соединен с вторым входом пятого функционального преобразователя, выход которого подключен к первому входу восьмого сумматора, выход последнего через третий ключ соединен с входом третьего интегратора, выход которого подключен к третьему входу пятого сумматора и к вторым входам седьмого и восьмого сумматоров, выход третьего сумматора соединен с вторым входом второго делителя напряжения. На чертеже-представлена структурная схема вычислителя угла атаки. Вычислитель состоит из задатчика момента инерции объекта относиельно поперечной оси, датчика 2 углол ого ускорения, датчика 3 угловой корости, датчика 4 отклонения руля ысоты задатчика 5 балансировочного гла атаки, датчика б положения закрыок, задатчика 7 балансировочного значения координаты положения центра масс, датчика 8 местного угла атаки пяти функциональных преобразователе 9-13, д;вух фильтров 14 и 15, низкой частоты, двух делителей 16 и 17 напряжения, трех интеграторов 18-20, восьми сумматоров 21-28 и трех клю,чей 29-31, а также трех шин, шины 32 скоростного напора, шины 33 числ Маха и шины 34 воздушной скорости. Вычислитель работает следующим образом. Для продольного движения самолет известно равенство .2;,(,гдеЗ - момент инерции самолета, cjz угловое ускорение, WT;- суммарный момент внешних си Раскрыв суммарный момент внешних сил, уравнение (1) можно записать как. z z 4 bQtnfi2 +mg-i.,v . (От. tp Р Т 4 т, -.j. + m -tgtni Р, где q, - скоростной напор, S - площадь крыла, Ъд - средняя аэродинамическая хорда, nig - значение коэффициента мо мента при значении коэфф циента подъемной силы Су О, mt,m ,ni, производные коэффициента момента по соответствующим параметрам, и - угол атаки, ot - скорость изменения угла атаки, Р - тяга силовых установок, Решив уравнение (2) относительно ot,, получают .i pVUz:ЧФ р Расчеты показывают, что 1 при п лете со скоростью 100 м/с имеет зна ние порядка 0,001-0,002 с и при уве чении скорости полета уменьшается. Поэтому в уравнении (3) членом Тоб можно пренебречь. Обозначив Кц,Ту и принимая во внимание, что для самолета с тягой по оси w О получают -Т- V4,(4) Uj.+m z L jSba ).c, ,)), относительная коор дината центра масс, относительная коорди ната фокуса, (М)-, . С учетом изложенного уравнение (4 можно представить как 1 f TZ . tnf mf N ос--обо+ -:- -- rr--Uj -: W +r«r-4 .(5) Xy f-p Cyl bbgC| C,j / Вычислитель угла атаки реализует зависимость (5) и может работать в двух режимах: комплексном и аналитическом, в комплексном режиме ключи 29-31 замкнуты. С выхода функционального преобразователя 9, реализующего зависимость Tg-cj сигнал постуC-qSb, пает на вход сумматора 21 непосредственно и на вход сумматора 22 через фильтр 14 низкой частоты, который осредняет сигнал, С выхода функционального преобразователя 10, реализующего зависимость т сигнал -rlrrWz, поступает на вход сумматора 21 непосредственно и на вход сумматора 22 через фильтр 15 низкой частоты, осредняющей сигнал, С выхода функциональНОГО преобразователя 11, реализующе го зависимость , сигнал постуТ Я Ч - . пает на вход сумматора 23, С выхода сумматора 23 сигнал поступает на вход cyNffiaTOpa 21 и через ключ 29 .на вход интегратора 18, с выхода которого сигнал подается на вход сумматора 22 и на вход сумматора 23, С выхода функционального преобразователя 12, реализующего зависимость . Х С.Хр, сигнал поступает на вход сумматора 25, с выхода которого сигнал поступает на входы делите.лей 16 и 17, на другие входы которых подаются сигналы соответственно с выхода сумматора 21 и с выхода сумматора 22, С выхода делителя 17 сигнсш поступает на вход сумматора 24, на другой вход которого поступает сигнал от задатчика балансировочного угла атаки самолета, а с выхода сумматора 24 сигнал через ключ 30 и интегратор 19 поступает на вход сумматора 26, на другой вход которого подается сигнал от задатчика 7 балансировочного значения координаты положения центра масс, а с выхода умматора 26 сигнал подается на вход умматора 25. С выхода функционального преобразователя 13, реализующего зависимость оС К -(йд , сигнал постуает на вход сумматора 27, с выхода оторого сигнал через ключ 31 и инегратор 20 подается на входы сумма
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РАССЕИВАЮЩИЙ ТОПЛИВО МЕХАНИЗМ | 1920 |
|
SU298A1 |
| Упругая металлическая шина для велосипедных колес | 1921 |
|
SU235A1 |
| Приспособление к комнатным печам для постепенного сгорания топлива | 1925 |
|
SU1963A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США 3654443, кл | |||
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ СИНХРОННОГОДВИГАТЕЛЯ | 0 |
|
SU235150A1 |
| Контрольный висячий замок в разъемном футляре | 1922 |
|
SU1972A1 |
