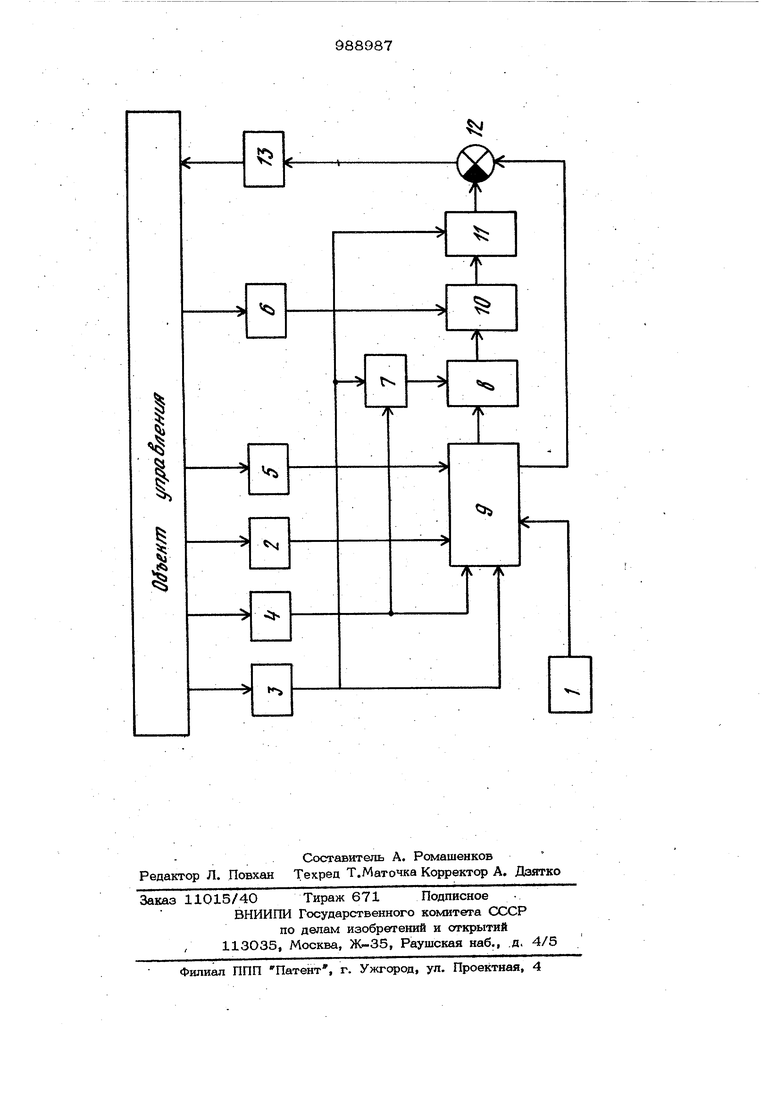
Изобретение отноЬится к средствам автоматизации горного оборудования, а- именно к устройству для управления ро- торным экскаватором. Извертно устройство для управления роторным экскаватором путем изменения скорости привода роторной стрелы при стабилизации его производительности t l Однако известное устройство не обёопечивает требуемой точности управления роторным экскаватором, так как в сигнал управления этого устройства вносится вр менное запаздывание. Известно устройство автоматического управления роторным экскаваторе, содер жашее задатчик и датчик производительности экскаватора, датчик нагрузки прквода ротора, узел сглаживания сигнала нагрузки, к первому вхсаду которого подк лючен датчик нагрузки, а выхсзд соединен с одним из входов элемента сфавнеиня, выход которогоI соединен с регулятором скорости привода поворота роторной стрелы, к BTqpc vry входу элемента сравнения подключен узел KqppeKiara, содержащий блоки деления и умножения, первый вход узла коррекции связан. с задатчиксм, а втярскй- с пеачхаиял провзводитепьяости, датчики скорости привода ротора и конвейера, выхоаы которых подключены соответ ственно к четвертому и пятому входам узла коррекции, третий вход KVfoporo соединен с датчиком нагрузки привела ротора, причем выхрп датчика .остя привода ротора соединен также с втсфым входом узла сглаживания сигнала нагруэ кн. в этом устройстве узел сглаживаняя ваг рузки хфивода ,явпяюшийся фятарам сигнала нагрузки, включает блок скользящего интегрирования на крегленнам. amej вале, равном периоду оборота ротора, который позволяет полностью выделить периодическую составляющую сигнала нагрузки, связанную с дебаяансом ротора. Е результате обеспечивается качественная фильтрация сигнала нагрузки привода ротора и улучшаются динамические свойства замкнутой системы регулирования 2 . Недостатком этого устройства является низкое быстродействие системы при отработке сигнала рассогласования нагрузки привода ротора, обусловленное запаздыванием сигнала обратной связи в узле сглаживания сигнала нагрузки привода ротора. Целью изобретения является повышение точности управления роторным экскаватором. Указанная иель достигается тем, что устройство для автоматического управления роторным экскаватором, включающее задатчик и датчик производительности экскаватора, да.тчик нагрузки привода, ротора, датчики скорости привода ротора и конвейера, узел сглаживания сигнала на.грузки, элемент сравнения, выкод которого соединен с входом регулятора скорости привода поворота, а один из входов элемента сравнения подключен к одному из выходов узла коррекции, снабжено преобразователем синуса угла поворота ротора, блоком выЧитания и двумя -блоками умножения, причем первый вход первого блока умножения соединен с выходом узла сглаживания. второй вход - с вторым выходом узла кор рекции, а выход первого блока умножения подключен к первому входу второго блока умножения, второй вход которого соединен с выходом преобразователя синуса угла поворота ротора, а выход второго блока умножения связан с первым входом блока вычитания, второй вход которого соединен с датчиком нагрузки привода ротора, а выход блока вычитания подключен ко второму входу элемента сравнения. На чертеже представлена схема устройства. Устройство содержит задатчик 1 произ водительности, датчик 2 производительности экскаватора, датчик 3 нагрузки привода ротора, датчик 4 скорости поворота ро тора, датчик 5 скорости конвейера, преобразователь 6 синуса угла поворота ротора например сельсин, узел 7 сглаживания сиг нала нагрузки, первый вход которого соединен с выходом датчика 3 нагрузки, второй вход - с выходсм датчика 4 скорости поворота ротора, а выход связан с первым входом первого блока 8 умножения, второй вход которого соединен с одним из выходов узла коррекции 9, первый вход которого связан с задатчнком 1, второй - с датчиком 2 производительности, третий . с датчиком 3 на1 рузки привода ротора, четвертый - с датчиком 4 скорости привода ротору а пятый - с датчиком 5 скорости конвейера. Выход первого блока 8 умножения связан с первым входом второго блока 10 умножения, второй вход которого соединен с выходом преобразователя 6 синуса угла поворота ротора, а выход второго, блока 10 умножения подключен к первому входу блока 11 вычитания, второй вход которого соединен с датчиком 3 нагрузки привода ротора, а выход блока 11 ш 1читания подключен к одному из входов элемента 12 сравнения,к другбму входу которого подключен второй выход узла 9 коррекции,а выход элемента 12 сравнения соединен со входе регулятора 13 скорооти приводаповорота роторной стрелы. Устройство работает следующим образом. От датчика 3 нагрузки привода ротора сигнал поступает на входы узла 9 коррекции, элемента 7 сглаживания и блока 11 вычитания. Одновременно на управляющие входы узла 9 коррекции поступают сигналы датчика 4 скорости ротора и датчика 5 скорости конвейера, а также сигналы датчика 2 и .задатчика 1 производительности экскаваторов. В узле 9 коррекции осуществляется задержка сигнала датчи 3 нагрузки привода ротора на время транспортного запаздывания сигнала 2 производительности, определяются средние интегральные значения на сколь зящем интервале, равном периоду оборота ротора, сигналов датчика 3 нагрузки привода ротора и датчика 2 производительности, а также вычисляется отношение этих сигналов, которое поступает на первый вход блока 8 умножения. Кроме того, в узле 9 коррекции производится умножение сигнала отношения на сигнал задатчика 1 производительности, и полученный таким образом сигнал скорректированного задания производительности по. - . дается с выхода узла 9 коррекшш на вход элемента 12 сравнения. В элементе 7 сглаживания, на управляющий вход которого поступает сигнал датчика 4 скорости ротора, определяется среднее интегральное значение тока ротора на скользящем интервале, равном периоду ротора. Сигнал с выхода элемента 7 сглаживания в блоке 8умножается на выходной сигнал блока 9коррекции и поступает на первый вход второго блока 1О умножения. В блоке 1О умножения, на второй вход которого поступает сигнал преобразователя 6 синуса угла поворота ротора, формируется сигнал прогнозируемой помех, которая определяется следующим выражением: I -ki bjHT . к -коэффициент пропорциональности;Ij. - сглаженное текущее аначе ние нагрузки привода ротора;среднее интегральное знач ние нагрузки хгривода ротора на скользящем равном периоду роторг :, о. - среднее интегральное значание производительности на скользящем интервале, равно периоду оборота ротора; oi - угол поворота ротора. В блоке 11 вычитания осуществляется компенсация помехи, вызванной дебаланясом ротора, в сигнале текущей нагрузки привода ротора. Сигнал с выхода блока 1 вычитания поступает на 1второй вход эл&мента 12 сравнения, где сравниваются со скорректированным сигналом задания прои зводительности, а сигнал, соответствующи их рассогласованию, с выхода элемента 1 сравнения подается на регулятор 13 скорости привода поворота роторной стрелы, который изменяет скорость поворота в направлении уменьщения указанного рассогласования. Введение в структуру устройства.np&образователя синуса угла поворота ротора обеспечивает определение без запаздывания частоты и формы периодической псммехи в сигнале нагрузки, связанной с дебалансом ротора, введение первого блока умножения, один из входов которого СО&динен с выходом блока деления узла коррекции, второй - с выходом элемента сглаживания сигнала нагрузки привода ротора, обеспечи1вает определение величины изменения амплитуды периодической помехи, обусловленного изменением условий экскавашш (крепости породы, cocTOsurae кромки ковшей и т.п.), введение второго блока умножения, один из входов которого соединен с выходом первого бло 1Ш умножения, второй вход - с выходом преобразователя синуса угла поворота ротора, обеспечивает формирование сигнала, соответствующего величине и форме периодической помехи в сигнале нагрузки , привода ротора, вызванной дебалансом тора, введение блока вычитания, вход уме ньшаемого которого соединен с выходом датчика нагрузки привода ротора, вход вычитаемого - с выходом второго блока умножения, а выход соединен с одним из входов элемента, сравнения, обеспечивает формирование полезной составляющей сигнала обратной связи, не содержащей периодического сигнала помехи, без запаэи. дывания. При этом скорость отработки сигнала рассогласования на выходе эл мента сравнения будет значительно как уменьшение постоянной времени в i цепи сигнала нагрузки привода ротора соэдает возможность увеличения быстродействия регулятора при условии обеспечения .устойчивости системы. Таким образом, на вход элемента сравнения устройства поступает сигнал полезной составляющей нагрузки привода ротора без запаздывания, что приводит к повышению быстродействия системы при стабилизации производительности, уменьшению динамической ошибки, повышению точности управления, а следовательно, к увеличению производительности экскаватора. Формула изобретения Устройство для автоматического упра&ления роторным экскаватором, включающее задатчик и датчик производительности экскаватора, датчик нагрузки привода ротора, датчики скорости привода ротора и конвейера, узел сглаживания сигнала нагрузки, элемент сравнения, выход которого соединен с входом регулятора скорости привода поворота, а один из входов элемента сравнения подключен к одному из выходов узла ко|1рекции,о тличающееся тем, что,с целью повышения точности управления, оно снабжено преобразователем синуса утла поворота ротора, блоком вычитания и двумя блоками умножения, причем первый вход первого блока умножения соединен с выходом узла сглаживания, второй вход - с вторым выходом узла коррекции, а выход первого блока умножения подклк чен к первому входу второго блока умножения, второй вход которого соединен с выходом -преобразователя синуса угла поворота ротора, а выход второго блока умножения связан с первым входом блока вычитания, втсфой вход которого соединен с датчиком нагру зки привода ротора, а выход блока вычитания подключен к второму входу элемента сравнения. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 304333, кл. ЕО2 F 3/26, 1969. 2.Авторское свидетельство СССР по заявке N 28887353, кл. Е О2 F 3/26, 1980.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления роторным экскаватором | 1982 |
|
SU1097757A1 |
| Устройство для автоматического управления роторным экскаватором | 1984 |
|
SU1221280A2 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для автоматического управления роторным экскаватором | 1987 |
|
SU1434039A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU899763A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Устройство для автоматического управления процессом копания роторного экскаватора | 1986 |
|
SU1421828A1 |
| Устройство для управления роторным экскаватором | 1982 |
|
SU1059073A1 |
| Способ задания скорости поворотного механизма роторного экскаватора | 1979 |
|
SU910942A1 |