Изобретение относится к вспомогательному оборудованию кузнечных ц хов,а именно к манипуляторам, и может быть использовано для переноса заготовок при их штамповке на горизонтально-ковочных машинах.
Известен манипулятор для переноса заготовок между ручьями штампа горизонтально-ковочной машины/ содержащий раму, захватный орган, направляющие, силовой цилиндр перемещения, узел регулирования высоты подъема захватного органа и систему управления tl3.
Недостатком указанного манипулятора являются большие затраты времени на переналадку при переустановке на новое межручьевое расстояние (перестановка регулировочных планок, болтов и контргаек), что при частых переналадках в условиях мелкосерийного производства значительно сокращает время работы основного формообразующего оборудования и, следовательно, снижает производительность труда. Кроме того, манипулятор, имеет большие габариты и невысокую надежность, обусловленную наличием нескольких исполнительных органов и значительного количества элементов системы управления.
Наиболее близким к изобретению по технической сущности и достигаемому результату является манипулятор для переноса заготовок между ручьями штампа горизонтально-ковочной машины, содержащий раму, захватный орган с приводом зажима, направляксцие и механизм перемещения захватного органа по направляющим, включающий кулак, установленный на приводном валу Г2 J.
Недостатком известного манипулятора является его невысокая точност позиционирования.
Цель изобретения - повышения точности позиционирования манипулятора для переноса заготовок,
Указанная цель достигается тем, что в манипуляторе для переноса заготовок между ручьями штампа горизонтально-ковочной машины, содержащем раму, захватный орган с приводом зажима, направляющие и механизм перемещения захватного орган-а по направляющим, включаквдий кулак, установленный на приводном валу, механизм перемещения захватного органа по направляющим выполне в виде неподвижно установленного на раме двухштокового силового цилиндра, связанного одним из щтоков с захватным органом, золотника, жестко закрепленного на другом штоке силового цилиндра с возможностью взаимодействия своим штоком с кулаком, и средства направления золотн ка при его возвратно-поступательном
перемещении, смонтированного на раме .
, Средство направления золотника при его возвратно-поступательном перемещении может быть выполнено в ви5 де неподвижно смонтированной на раме втулки с полостями, связанными с полостями золотника.
Золотник может быть выполнен подпружиненным относительно рамы.
0 Привод вала манипулятора может быть выполнен шаговым.
С целью повышения производительности при переналадке механизм перемещения захватного органа по направ5 лякщим может быть снабжен дополнительными кулаками, установленными на приводном валу, при этом кулаки смонтированы на валу с возможностью перемещения вдоль его оси и снабже0 ны средством перемещения в этом направлении.,
С целью повышения надежности захватный орган можетбыть выполнен в виде клещевого захвата.
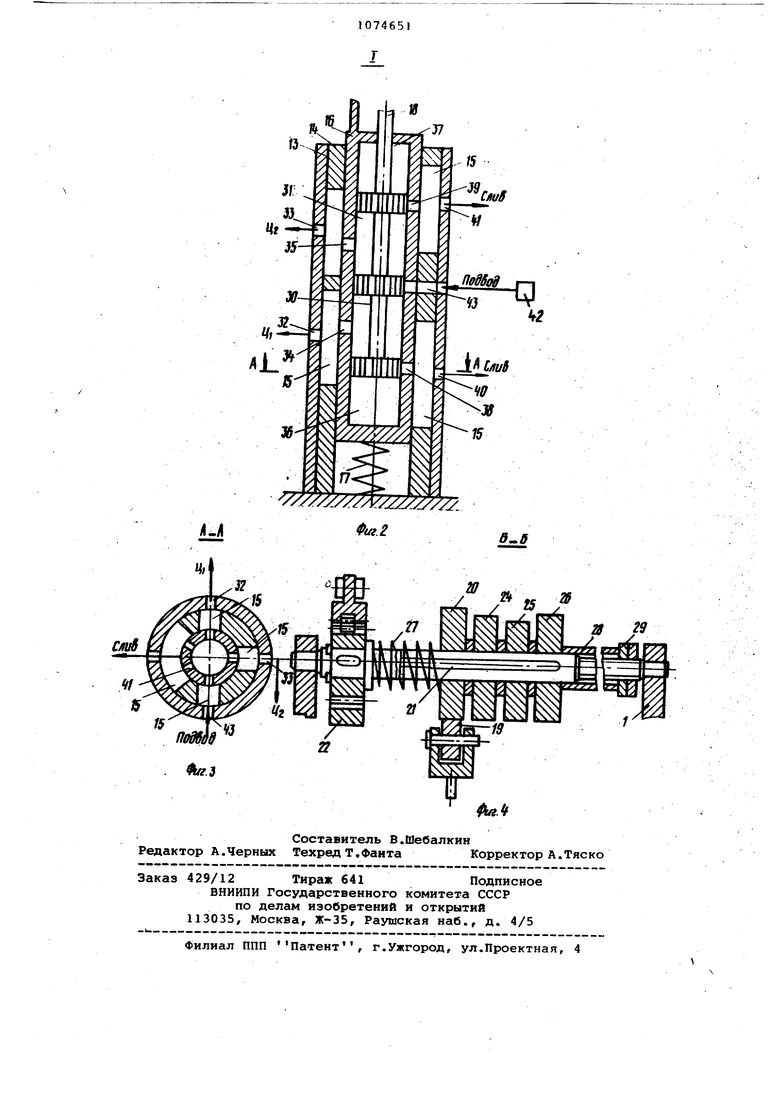
c На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - узел 1 на фиг. 1; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 1.
Манипулятор содержит раму 1, закрепленную на станине горизонтальноковочной машины, подвижный хобот 2 с клещевым захватом 3 и цилиндром 4 зажима. Подвижный хобот 2 установлен на направляющих 5, закрепленных
5 в раме 1, и шарнирно соединен с кулисой 6 через палец 7, установленный в пазу 8 кулисы б,
Кулиса 6 шарнирно установлена в опоре 9 на раме 1 и другим своим
0 концом связана подвижным соединением 10 со штоком 11 цилиндра 12 перемещения. На раме 1 установлен узел Управления механизма перемещения, состоящий из неподвижной втулки 13 и
5 запрессованной в нее втулки 14 с пазами 15. Во втулке 14 установлен под. вижно корпус 16 золотника в виде стакана, жестко связанного со штоком 11 цилиндра 12 и подпружиненного к раQ ме 1 пружиной 17.
В полости подвижного корпуса 16 размещен шток 18 золотника, который посредством ролика 19 находится в контакте с задающим кулачком 20, Задающий кулачок 20 установлен на валу 21, вращакицемся в опорах на раме 1, а вал 21 через обгонную муфту 22 соединен,с шаговым приводом 23 На валу 21 таким же образом, как и кулачок 20, установлены кулач0 ки 24 - 26, с одной стороны поджатые пружиной 27, ас другой стороны гайками 29 через втулку 28. Полости цилиндра 12 перемещения соединены с полостями 30 и 31 золотника через
5 каналы 32 и 33 соответственно, пазы 15 и каналы 34 и 35. Полости 36 и 37 золотника соединены со сливом через каналы 38 и 39, пазы 15 и каналы 40 и 41. Полости 30 и 31 золотника соединены с источником 42 давления каналом 43.
Манипулятор работает следующим образом.
Заготовку 44 захватывают клещевым захватом 3 и подают в первый ручей штампа горизонтально-ковочной машины (ГКМ) .
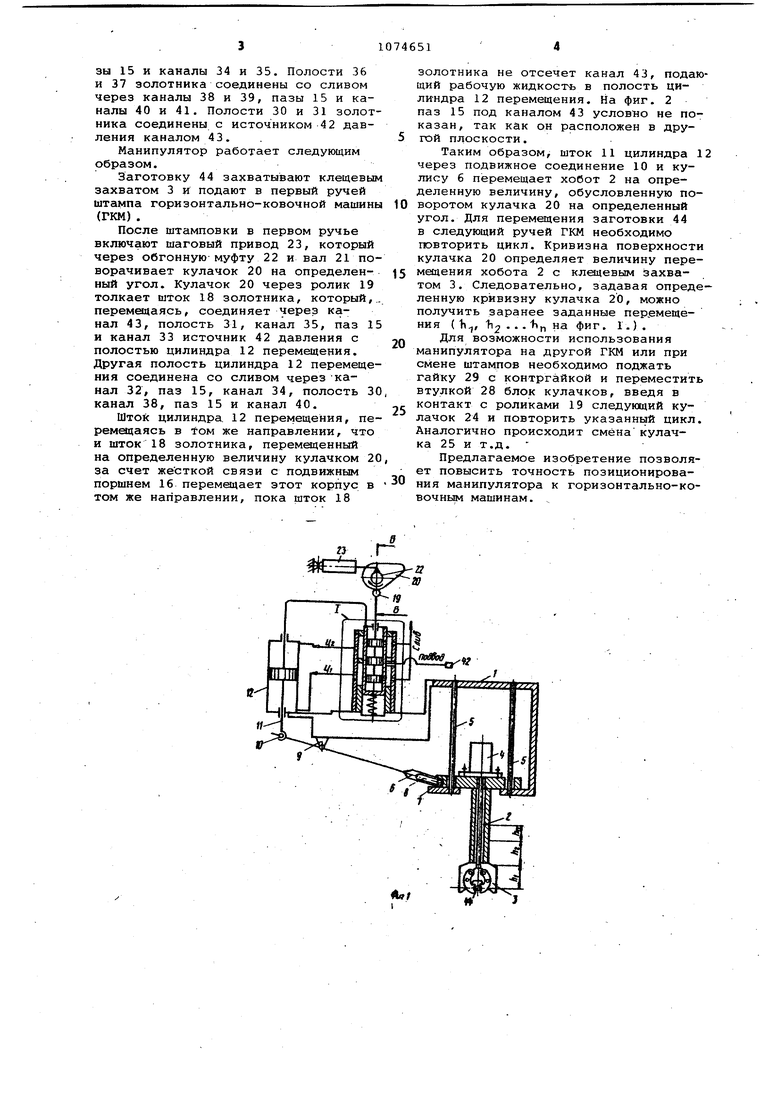
После штамповки в первом ручье включают шаговый привод 23, который через обгонную муфту 22 и вал 21 поворачивает кулачок 20 на определенный угол. Кулачок 20 через ролик 19 толкает шток 18 золотника, который,., перемещаясь, соединяет через канал 43, полость 31, канал 35, паз 15 и канал 33 источник 42 давления с полостью цилиндра 12 перемещения. Другая полость цилиндра 12 перемещения соединена со сливом через канал 32, паз 15, канал 34, полость 30 канал 38, паз 15 и канал 40.
Шток цилиндра. 12 перемещения, перемещаясь в toM же направлении, что и шток 18 золотника, перемоченный на определенную величину кулачком 20 за счет жесткой связи с подвижным поршнем 16 перемещает этот корпус в том же направлении, пока шток 18
золотника не отсечет канал 43, подающий рабочую жидкость в полость цилиндра 12 перемещения. На фиг. 2 паз 15 под каналом 43 условно не показан , так как он расположен в другой плоскости.
Таким образом, шток 11 цилиндра 1 через подвижное соединение 10 и кулису 6 перемещает хобот 2 на определенную величину, обусловленную поворотом кулачка 20 на определенный угол. Для перемещения заготовки 44 в следующий ручей ГКМ необходимо повторить цикл. Кривизна поверхности кулачка 20 определяет величину перемещения хобота 2 с клидевым захватом 3. Следовательно, задавая определенную кривизну кулачка 20, можно получить заранее заданные пер.емещения ( Ъ, h . .. Ь на фиг. 1.) .
Для возможности использования манипулятора на другой ГКМ или при смене штампов необходимо поджать гайку 29 с контргайкой и переместить втулкой 28 блок кулачков, введя в контакт с роликами 19 следующий кулачок 24 и повторить указанный цикл. Аналогично происходит смена кулачка 25 и т.д.
Предлагаемое изобретение позволяет повысить точность позиционирования манипулятора к горизонтально-ковочным машинам. ,
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Манипулятор к ковочным вальцам | 1973 |
|
SU651885A1 |
| Манипулятор ковочных вальцов | 1990 |
|
SU1756012A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Перекладчик к горизонтально-ковочной машине | 1972 |
|
SU450634A1 |
| Устройство для перемещения заготовок в процессе ковки | 1971 |
|
SU473556A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| МАНИПУЛЯТОР К КОВОЧНЫМ ВАЛЬЦАМ | 1973 |
|
SU388825A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
1, МАНИПУЛЯТОР ДЛЯ ПЕРЕНОСА ЗАГОТОВОК между ручьями штампа горизонтально-ковочной машины, содержащий раму, эахватный орган с приврдом зажима, направляющие и механизм перемещения за:хватнаго органа по направляющим, включающий кулак, устайовяеНйый на приводном , отличающий с я тем, что, с ххелыо повышения точности позициониро вакия, механизм перемещения захватного органа по направляющим вьтолнен в виде неподвижно установленного на раме двузонтокового силового цилиндра, связанного одним из штоков с захватным органом, золотника, жестко закрепленного на другом штоке силового цилиндра с возможностью взаикюдействия своим штоком с кулаком, и .средства направления золотника при его возвратно-поступательном перемещении, смонтированного на раме. 2.Манипулятор по п. 1, отличающийся тем, что средство направления золотника при его возвратно-поступательном перемещении выполнено в виде неподвижно смонтированной на раме втулки с полостями, связанными с полостями золотника. 3.Манипулятор по п. I, отличающий с я тем, что золотник выполнен подпружиненным относительно рамы. 4.Манипулятор по п. 1,отлич а ю щ и и с я тем, что привод вала выполнен шаговым. 5.Манипулятор по п. 1, отличающийся тем, что, с целью повышения производительности при переналадке, механизм перемещения захватного органа по направляющим снабжен дополнительными кулаками, установленными на приводном валу, при этом кулаки смонтированы на валу с возмо15ностю перемещения вдоль его оси и снабжены средством перемеМ щения в этом направлении. 1 6.Манипулятор по п. 1г о т л и ч а ю щ и и с я тем, что , с целью повЕлаения надежности, захватньай ор:л ган выполнен, в виде клещевого захвата.
:г
| Г | |||
| Ключников С,И | |||
| и др | |||
| Механизация в кузнечных цехах | |||
| М.,Машгиз, 1954, с | |||
| Способ приготовления кирпичей для футеровки печей, служащих для получения сернистого натрия из серно-натриевой соли | 1921 |
|
SU154A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для перемещения заготовок в штампах ковочных машин | 1936 |
|
SU50666A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
