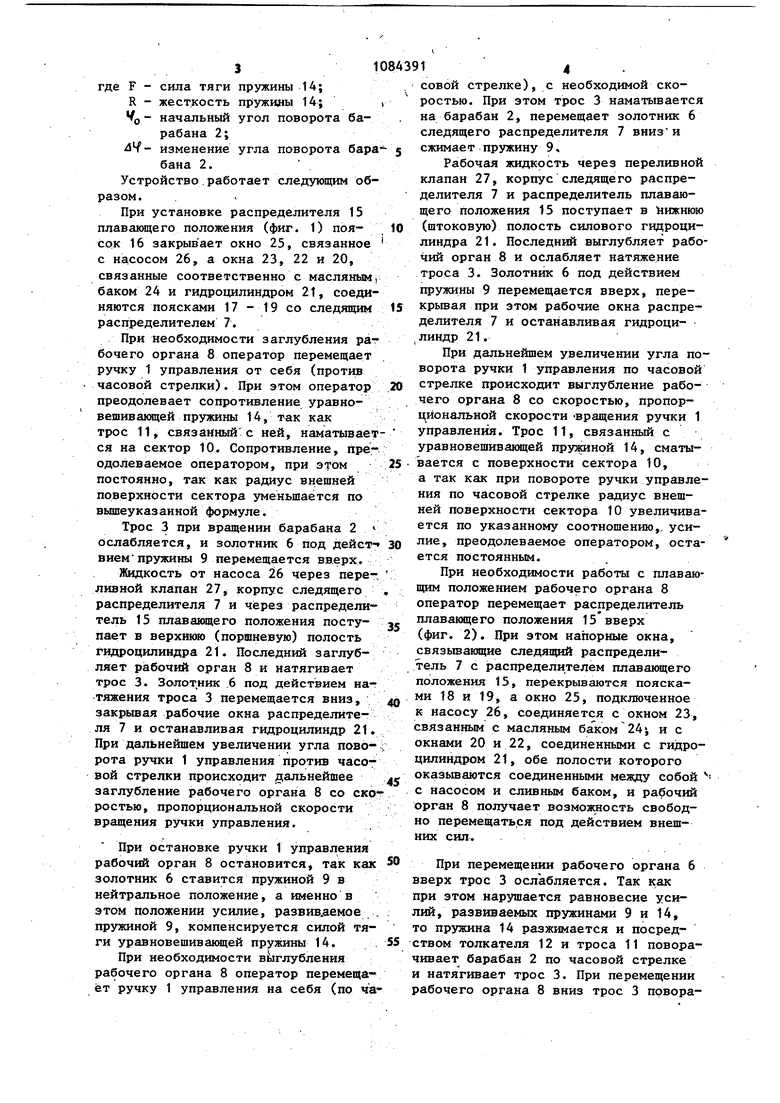
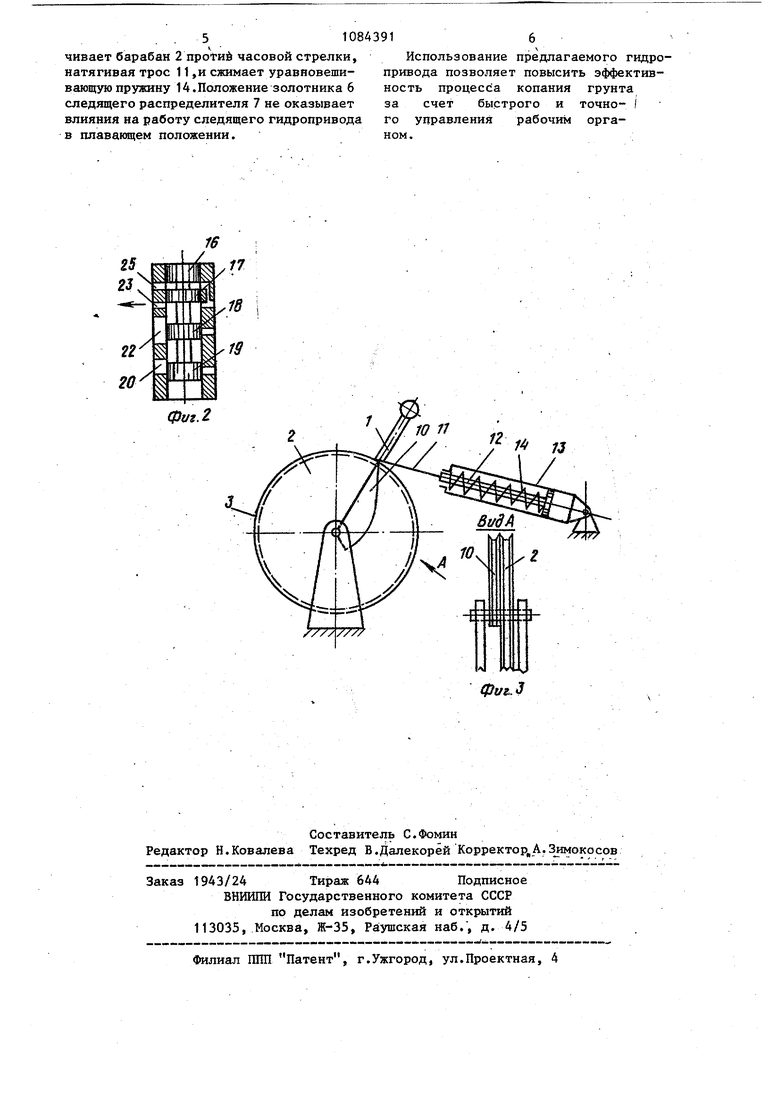
11 Изобретение относится к строитель ным и дорожным машинам, а именно к гидроприводам перемещения рабочих органов землеройно-транспортных машин. Известна следящая система управления рабочим органом, включакпцая си ловой цилинд подъема рабочего органа распределитель с подпружиненным золотником, рукоять управления распределителем и механизм o6patHofi свя зи силового цилиндра Недовтатком данной системы являет ся сложная система рычагов. Наиболее близким к предлагаемому является следящий гидропривод рабочего органа землеройной машины, вклю чанщий насос, следящий распределитель, распределитель плавающего положения силового гидроцилиндра рабочего органа, механизм обратной свя зи, содержащий систему блоков, один из которых закреплен на золотнике следящего распределителя, и трос, пропущенный через систему блоков и закрепленный одним концом к поворотному барабану, имеющему ручку управления С23. Недостаток известной системы за.ключается в сложной конструкции механизма обратной связи и системы, обеспечивающей плавающее положение рабочего оогана. Цель изобретения - упрощение конструкции следящего гидропривода. Указанная цель достигается тем, что у следящего гидропривода рабоче го органа землеройной машины, вклю чающего насос, следящий распределитель, распределитель плаГвающего пол жения силового гидррщшиндра рабочего органа, механизм обратной связи, содержащий систему блоков, один из которых закреплен яа золотнике следящего распределителя, и трос, пропущенный через систему блоков и прикрепленный одаим концом к пово ротному барабану, имекицему ручку управления, распределитель плавающе го положения смонтирован на следяще распределителе и имеет четыре окна, два из которых сообщены с силовым гидроцилиндром, одно со сливом и одно - с насосЬм, а второй конец тр са связан с рабочим органом, при 9foM поворотный барабан снабжен жес ко закрепленным на нем сектором с подпружиненным тросом, огибающим 1 внешнюю поверхность последнего, которая выполнена с радиусом, определяемым из соотношения F ZRCyo /) где F - сила тяги пружины; R - жесткость пружины; Чо- начальный угол поворота; ЛЧ- изменение угла поворота. На фиг. 1 изображена схема предлагаемого гидропривода; на фиг. 2 схема распределителя плавающего положения; на фиг. 3 - вид А на фиг. 1. Следящий гидропривод включает ручку 1 управления, смонтированную на корпусе поворотного барабана 2 и механизм обратной связи, включающий трос 3, закрепленный на поворотном барабане 2, систему блоков: неподвижные блоки 4, подвижный блок 5, соединенньй с золотником 6 следящего распределителя 7. Второй конец троса соединен с рабочим органом 8. Золотник 6 подпружинен пружиной 9 и находится в корпусе следящего распределителя 7. . На поворотном барабане 2 смонтирован сектор 10, на котором закреплен трос 11, соединенный посредством толкателя 12, заключенного в корпус 13 с уравновешивающей пружиной 14. На следящем распределителе 7 смонтирован распределитель 15 плавакицего положения, именщий пояски 16 - 19 и окна. Окно 20 подключено к поршневой полости гидроцилиндра 21, окно 22 - к штоковой полости гидроцилиндра 21, окно 23 .соединено с масляным баком 24 и окно 25 подключено к насосу 26. На следящем распределителе 7 смонтирован также переливной клапан 27, соединенный с предохранительнБЫ клапаном 28, насосом 26 и масляным баком 24, I, , , Для того, чтобы при отсутствии управляющего воздействия со стороны человека - оператора система находилась в равновесии, сила тяги уравнойешивающей пружины 14 должна компенсировать усилие пружины 9 в нейтральном положении золотника 6 при любом положении ручки 1 управления. Для этого внешняя поверхность сектора 10 имеет переменный радиус F 2R(V где F - сила тяги пружины 14; R - жесткость пружины 14; начальный угол поворота барабана 2; изменение угла поворота бара бана 2. Устройство .работает следзтощим образом. При установке распределителя 15 плаваищего положения (фиг. 1) поясрк 16 закрывает окно 25, связанное с насосом 26, а окна 23, 22 и 20, связанные соответственно с масляным баком 24 и гидроцилиндром 21, соединяются поясками 17 - 19 со следящим распределителем 7. При необходимости заглубления par бочего органа 8 оператор перемещает ручку 1 управления от себя (против часовой стрелки). При этом оператор преодолевает сопротивление уравновешивающей пружины 14, так как трос 11, связанныйс ней, наматывает ся на сектор 10. Сопротивление, пре.одолеваемое оператором, при этом постоянно, так как радиус внешней поверхности сектора уменьшается по вышеуказанной формуле. Трос 3 при вращении барабана 2 ослабляется, и золотник 6 под деиствиемпружины 9 перемещается вв.ерх. Жидкость от насоса 26 через переливной кла:пан 27, корпус следящего распределителя 7 и через распределитель 15 плаваняцего положения поступает в верхнюю (поршневую) полость гидроцилиндра 21. Последний заглубляет рабочий орган 8 и натягивает трос 3. Золот ник .6 под действием натяжения троса 3 перемещается вниз, закрывая рабочие окна распределителя 7 и останавливая гидроцилиндр 21. При дальнейшем увеличении угла поворота рзгчки 1 управления против часовой стрелки происходит дальнейшее заглубление рабочего органа 8 со ско ростью, пропорциональной скорости вращения ручки управления. При остановке ручки 1 управления рабочий орган 8 остановится, так как золотник 6 ставится пружиной 9 в нейтргшьное положение, а именно в этом положении усилие, развивдемое пружиной 9, компенсируется силой тяги уравновешивающей пружины 14. При необходимости выглубления рабочего органа 8 оператор перемещает ручку 1 управления на себя (по ча совой стрелке), с необходимой скоростью. При этом трос 3 наматывается на барабан 2, перемещает золотник 6 следящего распределителя 7 сжимает пружину 9, Рабочая жидкрсть через переливной клапан 27, корпус следящего распределителя 7 и распределитель плавающего положения 15 поступает в Нижнюю (штоковую) полость силового гидроцилиндра 21. Последний выглубляет рабочий орган 8 и ослабляет натяжение троса 3. Золотник 6 под действием пружины 9 перемещается вверх, перекрьшая при этом рабочие окна распределителя 7 и останавливая гидроцилиндр 21. При дальнейшем увеличении угла поворота ручки 1 управления по часовой стрелке происходит выглубление рабочего органа 8 со скоростью, пропорциональной скорости -вращения ручки 1 управления. Трос 11, связанный с уравновешивающей пружиной 14, сматывается с поверхности сектора 10, а так как при повороте ручки управления по часовой стрелке радиус внешней поверхности сектора 10 увеличивается по указанному соотношению, усилие, преодолеваемое оператором, остается постоянным. При необходимости работы с плавающим положением рабочего органа 8 оператор перемещает распределитель плавающего положения 15 вверх (фиг. 2). При этом напорные окна, связьшаницие следящий распределитель 7 с распределителем плавающего положения 15, перекрываются поясками 18 и 19, а окно 25, подключенное к насосу 26, соединяется с окном 23, связанным с масляным баком 24 и с окнами 20 и 22, соединенными с гидроцилиндром 21, обе полости которого оказываются соединенными между собой с насосом и сливньпм баком, и рабочий орган 8 получает возмояшость свободно перемещаться под действием внешних сил. При перемещении рабочего органа 6 вверх трос 3 ослабляется. Так как при этом нарушается равновесие усилий, развиваемых пружинами 9 и 14, то пружина 14 разжимается и посредством толкателя 12 и троса 11 поворачивает барабан 2 по часовой стрелке и натягивает трос 3. При перемещении рабочего органа 8 вниз трос 3 прворачивает барабан 2 протий часовой стрелки, натягивая трос 11 ,и сжимает уравновешивающую пружину 14.Положение золотника 6 следящего распределителя 7 не оказывает влияния на работу следящего гидропривода в плавакицем положении.
Использование предлагаемого гидропривода позволяет повысить эффективность процесса копания грунта за счет быстрого и точно- I го управления рабочим органом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1074975A2 |
| Следящая система управления рабочим органом землеройной машины | 1982 |
|
SU1076551A1 |
| Гидропривод управления рабочим органом землеройной машины | 1985 |
|
SU1258960A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1680887A1 |
| Гидропривод рабочего оборудования одноковшового экскаватора | 1982 |
|
SU1134679A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1983 |
|
SU1106879A1 |
| Следящая система управления рабочим органом землеройной машины | 1985 |
|
SU1308721A1 |
| Система управления манипулятором | 1980 |
|
SU884997A1 |
| Кабелеукладчик | 1988 |
|
SU1564287A1 |
СЛЕДЯЩИЙ ПЩРОПРИВОД РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНОЙ МАШИНЫ, включающий насос, следящий распределитель, распределитель плавающего положения силового гидроцилиндра рабочего органа, механизм обратной связи, содержащий систему блоков, один из которых закреплен на золотнике следящего распределителя, и трос, пропущенный через систему блоков и прикрепленный одним Концом к поворотному барабану, имеющему ручку управления, отличающийся тем, что, с целью его упрощения, распределитель плавающего положения смонтирован на следящем распределителе и имеет четыре окна, два из которых сообщены с силовым гидроцнлиндром, одно - со сливом и одно - с насосом, а второй конец троса связан с рабочим органом, при этом поворотный барабан снабжен жестко закрепленным на нем сектором с подпружиненным тросом, огибакнцим внешнюю поверхность последнего, которая выполнена с радиусом, определяемым из соотношения , . . 2К(Чс,+Л) где F - сила тяги пружины; R - жесткость пружины; Чд - начальный угол поворота; 44 - изменение угла поворота.
фиг..З
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧИМОРГАНОМ | 1971 |
|
SU424950A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Следящая система управления рабочим органом землеройной машины | 1981 |
|
SU962483A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
