Предметом изобретения яв.тяется устроГютги; д.тя ручного управ.тения автоматичеекой обработки криволинейных 1К)верхностеГ на копировальных ста1п ах с э.тектромагпитнымн ry(|rlaми к лриводе подачи.
В извест гь х veTpoiicTBax управление нроцеееом обработки доетигается регулированием скорости подачи с помон1ью электродвигателей постоянного тока к.ли 1и;1.р()цнлиндров.
Регулирование скорости результируюнгей подачи суппорта в описываемом устройстве достигается с ПОМОП.1ЫО электромагнитных муфт в нриводе нодачи отде.льных салазок суггпорта, попеременно и.ти одновременпо вк.1ючаемГ)1х на разные промежутки времени.
Особенность описьп5аемого устpoircTBa зак почаетея в применении вра1наюн1ихся с постоянной скоростью контактных раснределительных барабанов или дисков с нолзунками-н1,етками, скольжение которых от руки вдоль образуюн1ей поверхности барабана или диска обеспечивает раз.личное по продолжительности включение муфт в приводе подачи с}ппорта станка.
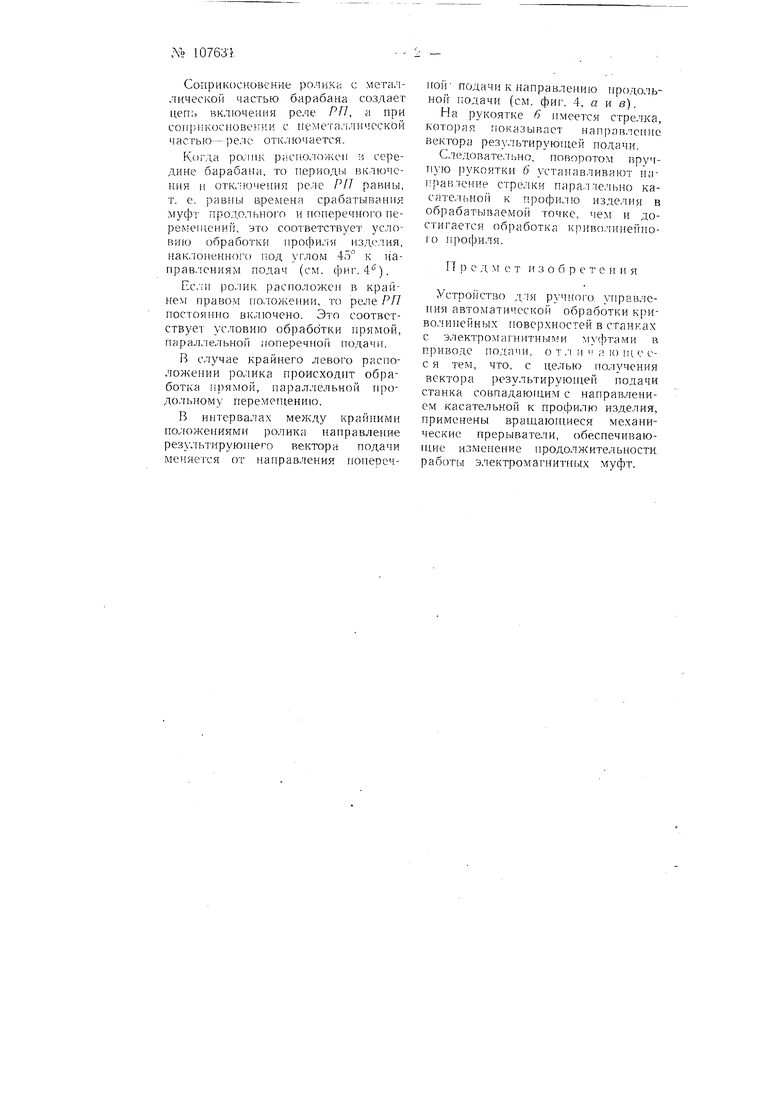
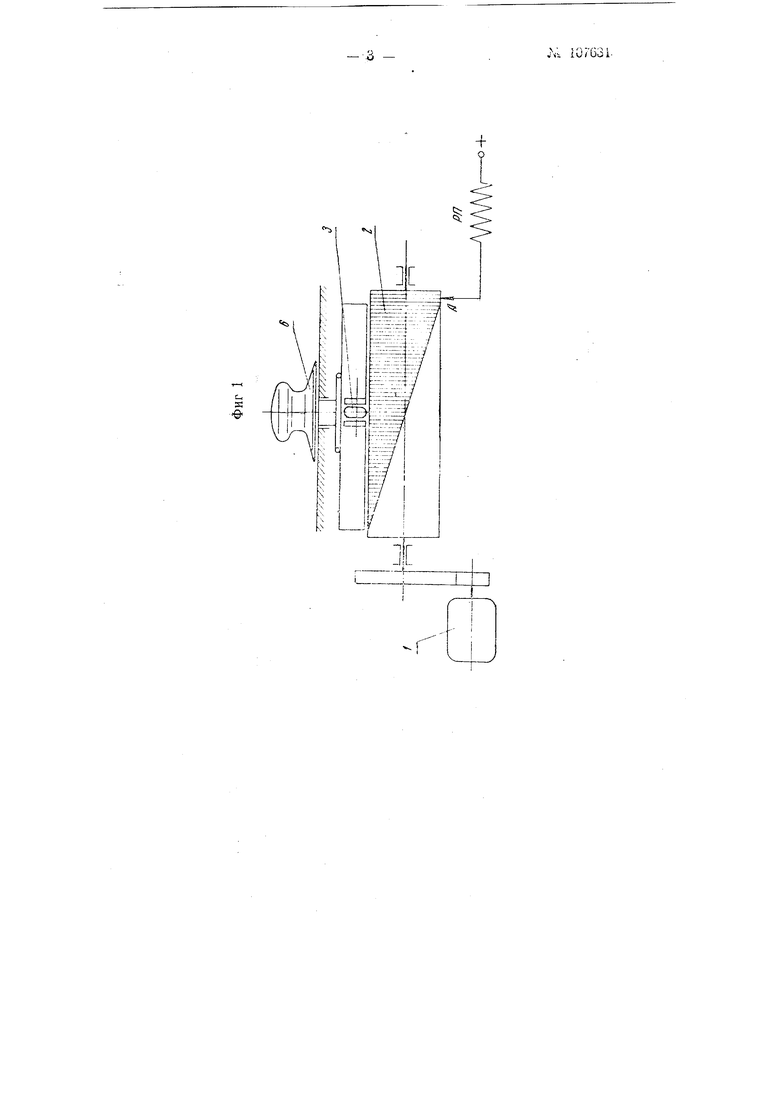
На фиг. 1 представлено описываемое ycTpoiicTBO, вид сбоку; на фиг 2--Л-О же, в плане; на фиг. 3 - электрическая схема; на фиг. 4 - тракторня движения инструмента при обработке контуров с раз.чичным наклоном.
От э.тектродвигателя / через зубчатую нере.тачу приводится во вращение барабан 2. Барабан выполнен таким образом, что одна половина его яв.ляется металлической, а другая по.човина - неметаллической. По барабану скользит ролик 5; который через рейку 4 и пгестерню 5 связан с рукояткой 6.
Вращением рукоятки 6 ролик 3 перемен1ается в. барабана. К металлическо части барабана подключена через нхеточный контакт Л катунжа реле РП. контакты которого управляют муфтами продольного и поперечного неремеп1ення.
Соприкосновение ролика с металлической частью барабана создает цепь включения реле РП, а при соприкосновении с пеметаллическОй частью-- реле отк.лючается.
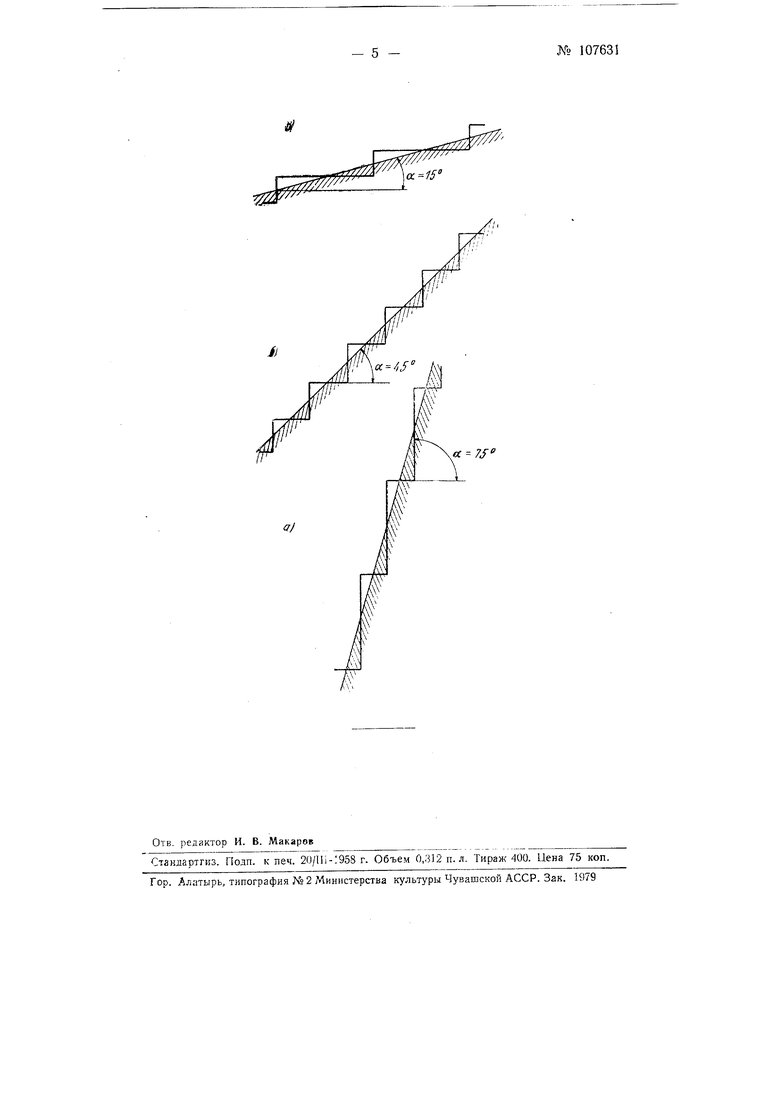
Когда ролик расио.Тожеи в середине барабана, то периоды включения и отк.иочения реле /V/ равны, т. е. равны времена срабатывания муфт продольного и поперечного перемещений, это соответствует условию обработки профи.чя изделия, наклонениого иод углом 45° к направ.тениям подач (см. фиг. 4).
Ес,П1 po.iHK расположен в крайне г правом по.чожеиии, то реле РП постоя 1И1О включено. Это соответствует условию обработки прямой, парал.ле,7гьной иоперечной подач1Г.
В случае крайнего левого расположении ролика происходит обработка прямой, парал.гельной продольному перемещению.
В интервалах между крайними по;гожениями ролика направление резу.тьтирую1него вектора подачи меняется от направления поперечной подачи к направлению продольной подачи (см. фиг. 4, а и в).
На рукоятке 6 имеется стрелка, которая показывает направление вектора результируюп ей подачи.
Следовате.тьно, поворотом вручную |Пкоятки 6 устанавливают направление стрелки паря-кгельпо касате.льной к профилю изделия в обрабатываемой точке, чем и достигается обработка криво,чииейпо о .
I р е д м с т и 3 о б р е
и и я
Устройство для ручного, управления автоматической обработки криволинейны.х поверхностей в станках с электромагнитными му({)тами в приводе подачи, о т .i м , ю HI е сс я тем, что, с целью ио,лучения вектора результируюи1ей подачи станка совпадаюидим с направлением касательной к профилю изделия, применены врашаюгииеся механические прерыватели, обеспечивающие изменение продолжительности работы электромагнитных муфт.
«ч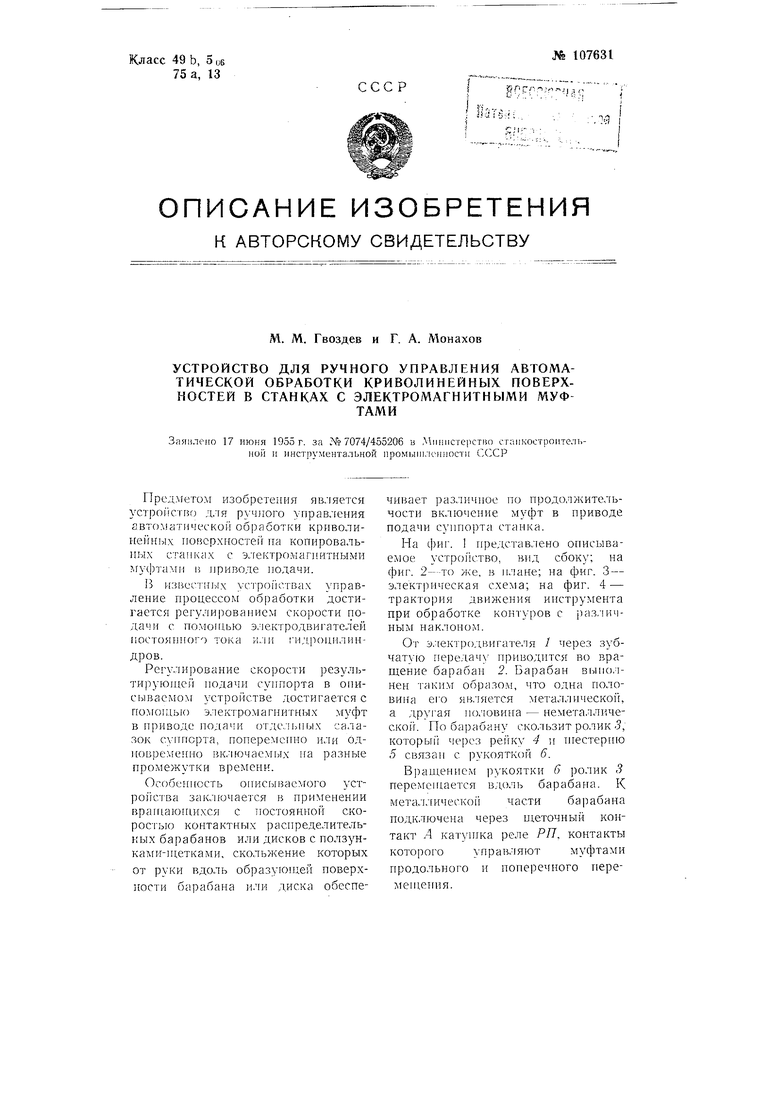
«
сэ
rz3
- 2Ьлмн1
Фиг. 3
iW-Ml
„...
a 15
7J
