.2. Устройство по П.1, отличающееся тем, что, с целью повышения точности останова машины, оно имеет блок автоматической настройки тормозов, регуляторы интен-i сивности торможения и задатчик пу ти торможения, при этом выходы датчиков текущего положения валов подключены соответственно к первому и второму входам блока автоматической настройки тормозов, третий вход которого связан с выходом зада тчика пути f торможения,четвертый вход соединен с вторым выходом вычислительного блока, а выходы соответсвенно подключены к регуляторам интенсивности торможения.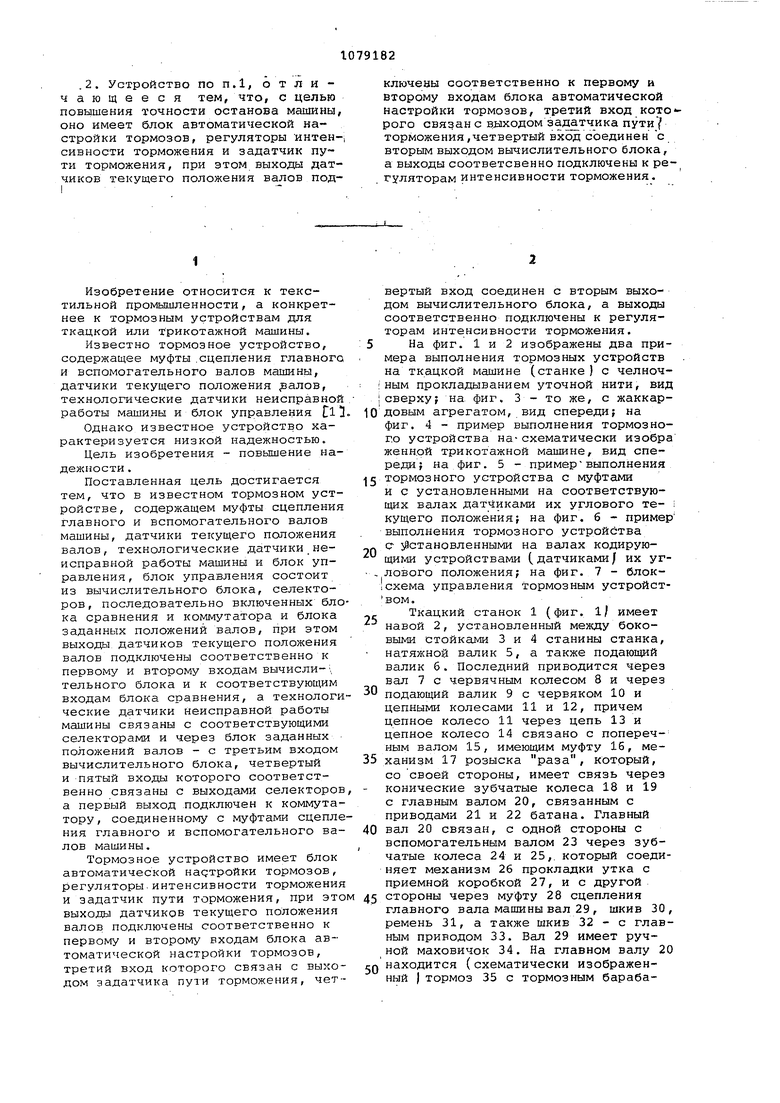
| название | год | авторы | номер документа |
|---|---|---|---|
| Ткацкий станок с зажимными челноками | 1985 |
|
SU1407405A3 |
| Тормоз микрочелнока для ткацкого станка | 1986 |
|
SU1414321A3 |
| Электромагнитное устройство для торможения уточной нити | 1988 |
|
SU1838475A3 |
| Тормозное устройство ткацкого станка | 1979 |
|
SU1025335A3 |
| Привод ткацкого станка | 1977 |
|
SU660600A3 |
| Товарный регулятор на ткацком станке | 1988 |
|
SU1602396A3 |
| Электронное устройство для управления ткацким станком | 1979 |
|
SU934911A3 |
| Ткацкий станок | 1988 |
|
SU1743362A3 |
| Устройство для подачи основных нитей к ткацкому станку с секционным навоем | 1973 |
|
SU592367A3 |
| Устройство для регулирования скорости прокладывания уточной нити на ткацком станке | 1981 |
|
SU1056913A3 |
1. ТОРМОЗНОЕ УСТРОЙСТВО НА МАШИНЕ ДЛЯ ВЫРАБОТКИ ТЕКСТИЛЬНЫХ ИЗДЕЛИЙ ПЛОСКОЙ ФОРМЫ, содержащее муфты сцепления главного и- вспомогательного валов машины, датчики текущего положения валов, технологические датчики неисправной работы машины и блок управления, о т личающееся тем, что, с целью повышения надежности, блок управления состоит из вычислительного блока, селекторов, последовательно включенных блока сравнения и коммутатора и блока заданных положений валов, при этом выходы датчиков текущего положения валов подключены соответственно к первому и второму входам вычислительного блока и к- соответствующим входам блока сравнения, а технологические датчики неисправной работы машины связаны с соответствующими селекторами и через блок заданных положений валов - с третьим входом вычислительного блока, четвертый и пяi тый входы которого соответственно связаны с выходами селекторов, а СЛ первый выход подключен к коммутатору, соединенному с муфтами сцепления главного и вспомогательного валов машины.
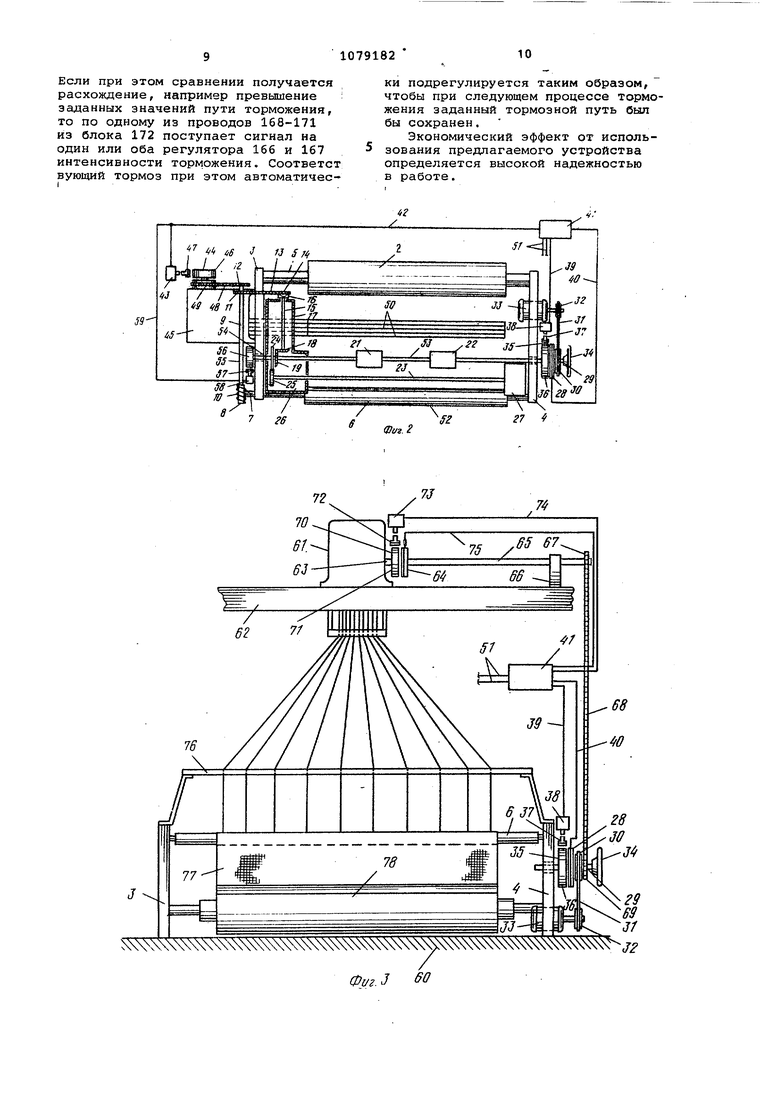
Изобретение относится к текстильной промышленности, а конкретнее к тормозным устройствам для ткацкой или трикотажной машины. Известно тормозное устройство, содержащее муфты .сцепления главного и вспомогательного валов машины, датчики текущего положения залов, технологические датчики неисправной работы машины и блок управления Cl Однако известное устройство характеризуется низкой надежностью. Цель изобретения - повышение надежности . Поставленная цель достигается тем, что в известном тормозном устройстве, содержащем муфты сцепления Главного и вспомогательного валов машины, датчики текущего положения валов, технологические датчики неисправной работы машины и блок управления , блок управления состоит из вычислительного блока, селекторов, последовательно включенных бло ка сравнения и коммутатора и блока заданных положений валов, при этом выходы дат-чиков текущего положения валов подключены соответственно к первому и второму входам вычисли- тельного блока и к соответствующим входам блока сравнения, а технологи ческие датчики Неисправной работы машины связаны с соответствующими селекторами и через блок заданных положений валов - с третьим входом вычислительного блока, четвертый и пятый входы которого соответственно связаны с выходами селекторов а первый выход .подключен к коммутатору, соединенному с муфтами сцепле ния главного и вспомогательного валов машины. Тормозное устройство имеет блок автоматической надтройки тормозов, регуляторы.интенсивности торможения и задатчик пути торможения, при это выходы датчиков текущего положения валов подключены соответственно к первому и второму входам блока автоматической настройки тормозов, третий вход которого связан с выхо дом эадатчика пути торможения, чет вертый вход соединен с вторым выходом вычислительного блока, а выходы соответственно подключены к регуляторам интенсивности торможения. На фиг. 1 и 2 изображены два примера выполнения тормозных устройств на ткацкой машине (станке ) с челночным прокладыванием уточной нити, вид сверху; на фиг. 3 - то же, с жаккардовым агрегатом, вид спереди; на фиг. 4 - пример выполнения тормозного устройства на-схематически изобра женн.ой трикотажной машине, вид спереди; на фиг. 5 - примервыполнения тормозного устройства с муфтами и с установленными на соответствующих валах датчиками их углового те- i кущего положения; на фиг. б - пример выполнения тормозного устройства с- Зстановленными на валах кодирующими устройствами (.датчиками/ их углового положения; на фиг. 7 - блоксхема управления тормозным устройством. Ткацкий станок 1 (фиг. 1/ имеет навой 2, установленный между боковыми стойками 3 и 4 станины станка, натяжной валик 5, а также подающий валик б. Последний приводится через вал 7 с червячным колесом 8 и через подающий валик 9 с червяком 10 и цепными колесами 11 и 12, причем цепное колесо 11 через цепь 13 и цепное колесо 14 связано с поперечным валом 15, имеющим муфту 16, механизм 17 розыска раза, который, со своей стороны, имеет связь через конические зубчатые колеса 18 и 19 с главным валом 20, связанным с приводами 21 и 22 батана. Главный вал 20 связан, с одной стороны с вспомогательным валом 23 через зубчатые колеса 24 и 25,. который соединяет механизм 26 прокладки утка с приемной коробкой 27, и с другой стороны через муфту 26 сцепления главного вала машины вал 29 , шкив 30, ремень 31, а также шкив 32 - с главным приводом 33. Вал 29 имеет ручной маховичок 34. На главном валу 20 находится (схематически изображенный ) тормоз 35 с тормозным барабаном36 и тормозной колодкой 37, Тормоз 35 через исполнительный механизм 38 соединен со станиной управления с помощью привода 39, Муфта 28 через провод 40 соединена со станиной 41 управления. Последняя соединена проводом 42 с исполнительным механизмом 43, управляющим тормозом 44, установленным на зевообразующем механизме 45, который имее тормозной барабан 46 и тормозную колодку 47.
Зевообразующий механизм 45 приводи.тся от подающего вала 9 через цепь 48 и цепное колесо 49. Ремизки, управляемые зевообразующим механизмом 45, обозначены цифрой 50. В качестве исполнительных механизмов 38 могут быть использованы, например , пневматические или гидравлические цилиндры, электромагниты, пружины и т.д. По проводу 51 станция 41 связана с датчиками, контролирующими работу станка.
Ткацкий станок 52 (фиг. 2) отличается от ткацкого станка 1 (фиг.1) только тем, что имеет удлиненный главный вал 53, который проходит через стойку станины 3, опирается на подшипник 54, и на котором установлен дополнительный тормоз 55 с тормозным барабаном 56 и тормозной колодкой 57. Тормоз 55 приводится в действие с помощью исполнительного механизма 58, который через провода 59 и 42 подключен к станции 41 управления.
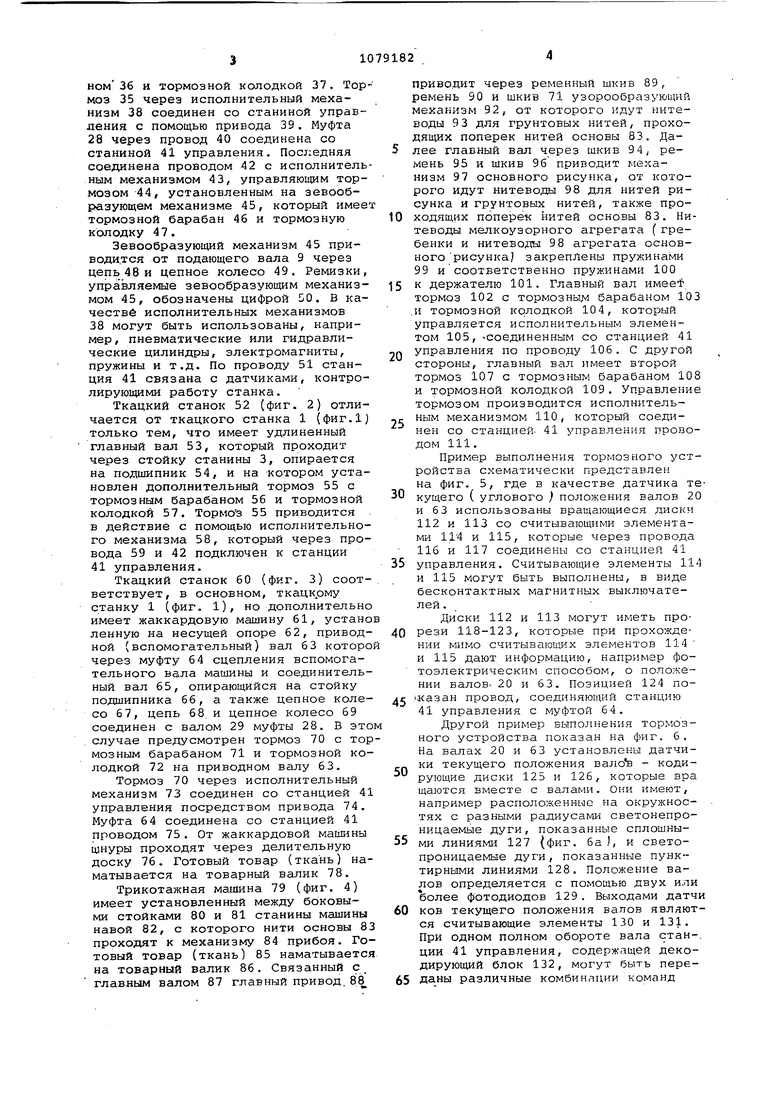
Ткацкий станок 60 (фиг. 3) соответствует, в основном, ткацкрму станку 1 (фиг. 1), но дополнительно имеет жаккардовую машину 61, устано ленную на несущей опоре 62, приводной (вспомогательный) вал 63 которо через муфту 64 сцепления вспомогательного ваша машины и соединительный вал 65, опирающийся на стойку подшипника 66, а также цепное колесо 67, цепь 68. и цепное колесо 69 соединен с валом 29 муфты 28. В это случае предусмотрен тормоз 70 с тормозным барабаном 71 и тормозной колодкой 72 на приводном валу 63.
Тормоз 70 через исполнительный механизм 73 соединен со станцией 41 управления посредством привода 74. Муфта 64 соединена со станцией 41 проводом 75. От жаккардовой машины щнуры проходят через делительную доску 76. Готовый товар (ткань) наматывается на товарный валик 78.
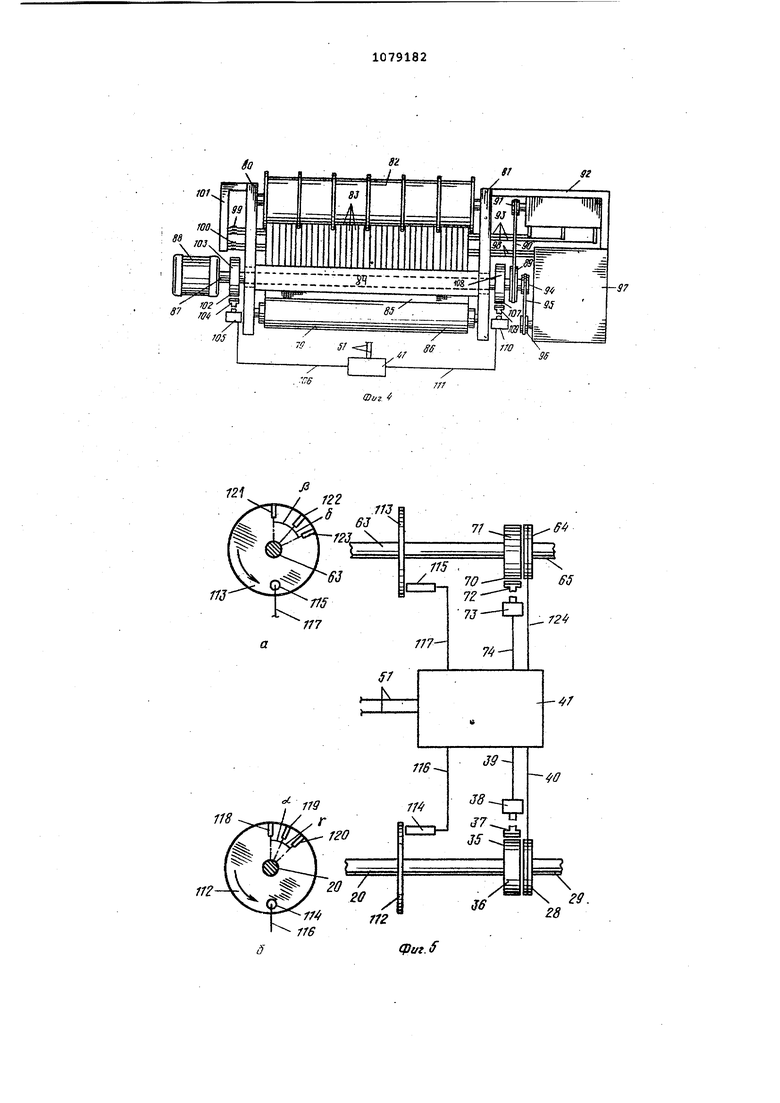
Трикотажная машина 79 (фиг. 4) имеет установленный между боковыми стойками 80 и 81 станины машины навой 82, с которого нити основы 83 проходят к механизму 84 прибоя. Готовый товар (ткань) 85 наматывается на товарный валик 86. Связанный с главным валом 87 главный привод. 88
приводит через ременный шкив 89, ремень 90 и шкив 71 узорообразующий механизм 92, от которого идут нитеводы 93 для грунтовых нитей, проходящих поперек нитей основы 83. Далее главный вал через шкив 94, ремень 95 и шкив 96 приводит механизм 97 основного рисунка, от которого идут нитеводы 98 для нитей рисунка и грунтовых нитей, также про0 ходящих поперек нитей основы 83. Нитеводы мелкоузорного агрегата ( гребенки и нитеводы 98 агрегата основного рисунка) закреплены пружинами 99 и соответственно пружинами 100
5 к держателю 101. Главный вал имее тормоз 102 с тормозным барабаном 103 .и тормозной колодкой 104, который управляется исполнительным элементом 105, -соединенным со станцией 41
Q управления по проводу 106. С другой стороны, главный вал имеет второй тормоз 107 с тормозным барабаном 108 и тормозной колодкой 109. Управление тормозом производится исполнительнь7м механизмом 110, который соединен со станцией- 41 управления проводом 111.
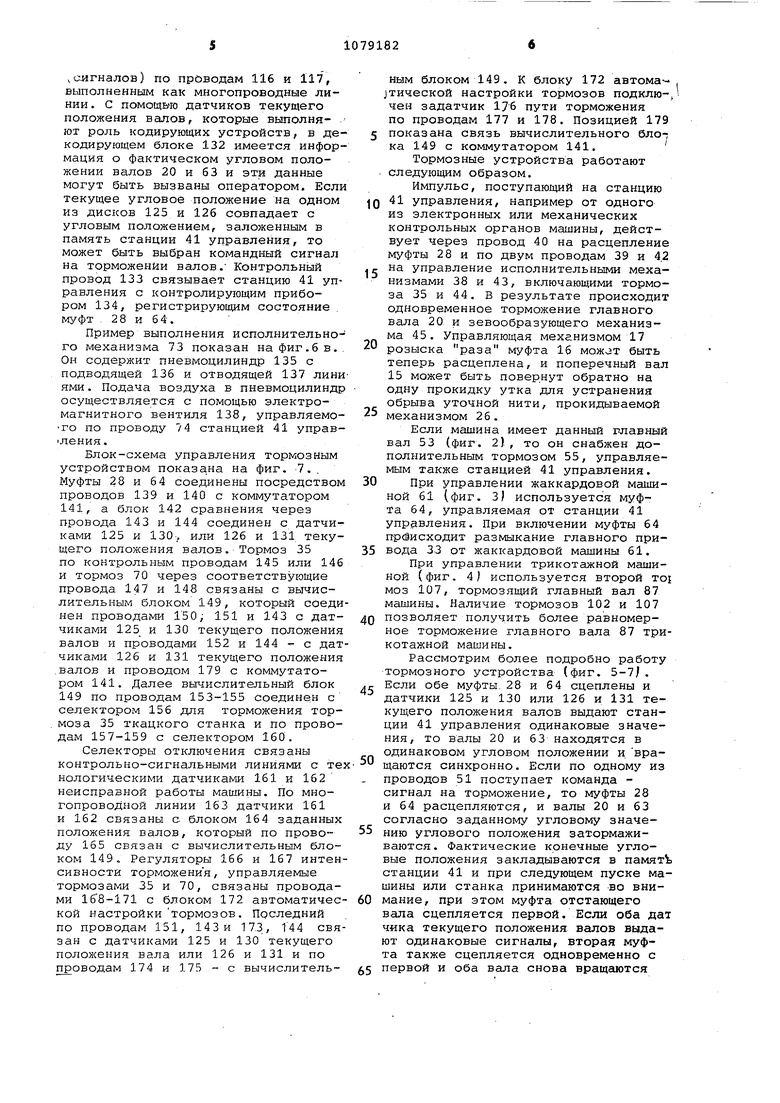
Пример выполнения тормозного устройства схематически представлен на фиг. 5, где в качестве датчика те0 кущего ( углового ) положения валов 20 и 63 использованы вращающиеся диски 112 и 113 со считывающими элементами 114 и 115, которые через провода 116 и 117 соединены со станцией 41
5 управления. Считывающие элементы 114 и 115 могут быть выполнены, в виде бесконтактных магнитных выключателей.
Диски 112 и 113 могут иметь про0 рези 118-123, которые при прохождении мимо считывающих элементов 114 и 115 дают информацию, например фотоэлектрическим способом, о положении валов. 20 и 63. Позицией 124 по5 оказан провод, соединяющий станцию 41 управления с муфтой 64.
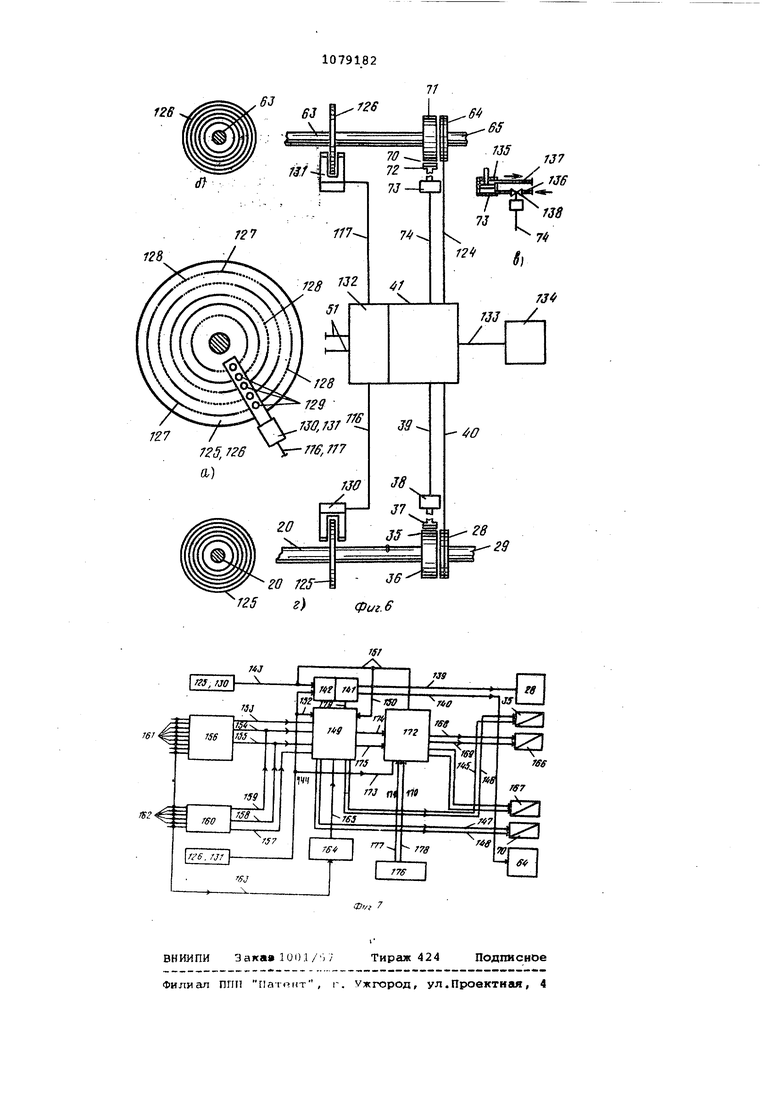
Другой пример выполнения тормозного устройства показан на фиг. 6. На валах 20 и 63 установлеЕ-:ы датчи ки текущего положения - кодиРУющие диски 125 и 126, которые вра щаются вместе с валами. Они имеют, например расположеннь11С на окружностях с разными радиусами светонепроницаемые дуги, показанные сплошны5 ми линиями 127 (фиг. 6а), и светопроницаемые дуги, показанные пунктирными линиями 128. Положение валов определяется с помощью двух или Ъолее фотодиодов 129. Выходами датчи
0 ков текущего положения валов являются считывающие элементы 130 и 131. При одном полном обороте вала стан-, ции 41 управления, содержащей декодирующий блок 132, могут быть пере5 даны различные комбинации команд
слгналов) по проводам 116 и 117, выполненным как многопроводные линии . С помощьчо датчиков текущего положения валов, которые выполняют роль кодирующих устройств, в декодирующем блоке 132 имеется информация о фактическом угловом положении валов 20 и 63 и эти данные могут быть вызваны оператором. Если текущее угловое положение на одном из дисков 125 -к 126 совпадает с угловым положением, зало}хенным в память станции 41 управления, то может быть выбран командный сигнал на торможении валов. Контрольный провод 133 связывает станцию 41 управления с контролирующим прибором 134, регистрирующим состояние муфт , 28 и 64.
Пример выполнения исполнительного механизма 73 показан на фиг,б в.. Он содержит пневмоцилиндр 135 с подводящей 136 и отводящей 137 линиями . Подача воздуха в пневмоцилиндр осуществляется с помощью электромагнитного вентиля 138, управляемого по проводу 74 станцией 41 управления.
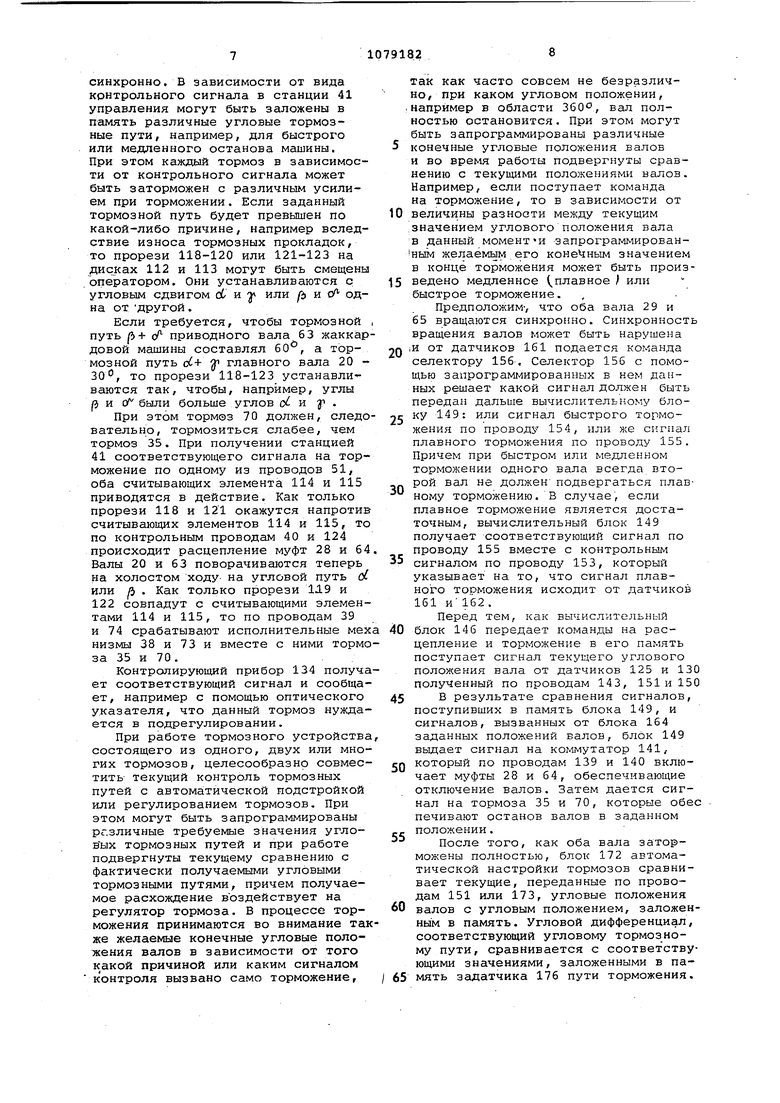
Блок-схема управления тормозным устройством показана на фиг. -7. . Муфты 23 и 64 соединены посредством проводов 139 и 140 с коммутатором 141, а блок 142 сравнения через провода 143 и 144 соединен с датчиками 125 и 130 или 126 и 131 текущего положения валов. Тормоз 35 по контрольным проводам 145 или 146 и тормоз 70 через соответствующие провода 147 и 148 связаны с вычислительным блоком 149, который соединен проводами 150; 151 и 143 с датчиками 125 и 130 текущего положения валов и проводами 152 и 144 - с датчиками 126 и 131 текущего положения .валов и проводом 179 с коммутатором 141. Далее вычислительный блок 149 по проводам 153-155 соединен с селектором 156 для торможения тормоза 35 ткацкого станка и по проводам 157-159 с селектором 160.
Селекторы отключения связаны контрольно-сигнальными линиями с тенологическими датчиками 161 и 162 неисправной работы машины. По многопроводной линии 163 датчики 161 и 162 связаны с блоком 164 заданных положения валов, который по проводу 165 связан с вычислительным блоком 149. Регуляторы 166 и 167 интенсивности торможения, управляемые тормозами 35 и 70, связаны проводами 1б8-171 с блоком 172 автоматической настройкитормозов. Последний по проводам 151, 143 и 17.3, 144 связан с датчиками 125 и 130 текущего положения вала или 126 и 131 и по проводам 174 и 175 - с вычислительным блоком 149. К блоку 172 автомаJтичecкoй настройки тормозов подключен задатчик 176 пути торможения по проводам 177 и 178. Позицией 179 показана связь вычислительного бло-; ка 149 с коммутатором 141.
Тормозные устройства работают следующим образом.
Импульс, поступающий на станцию 41 управления, например от одного из электронных или механических контрольных органов машины, действует через провод 40 на расцепление муфты 28 и по двум проводам 39 и 4,2 на управление исполнительными механизмами 38 и 43, включающими тормоза 35 и 44. В результате происходит одновременное торможение главного вала 20 и зевообразующего механизма 45. Управляющая механизмом 17 розыска раза муфта 16 моЖчЗТ быть теперь расцеплена, и поперечный вал 15 может быть повернут обратно на одну прокидку утка для устранения обрыва уточной нити, прокидываемой механизмом 26.
Если машина имеет данный главный вал 53 (фиг. 2}, то он снабжен дополнительным тормозом 55, управляемым также станцией 41 управления.
При управлении жаккардовой машиной 61 (фиг. 3) используется муфта 64, управляемая от станции 41 управления. При включении муфты 64 прсйисходит размыкание главного привода 3-3 от жаккардовой машины 61.
При управлении трикотажной машиной (фиг. 4) используется второй TO моз 107, тормозящий главный вал 87 машины. Наличие тормозов 102 и 107 позволяет получить более равномерное торможение главного вала 87 трикотажной машины.
Рассмотрим более подробно работу тормозного устройства (фиг. 5-7/. Если обе муфты. 28 и 64 сцеплены и датчики 125 и 130 или 126 и 131 текущего положения валов выдают станции 41 управления одинаковые значения, то валы 20 и 63 находятся в одинаковом угловом положении и вращаются синхронно. Если по одному из проводов 51 поступает команда сигнал на торможение, то муфты 28 и 64 расцепляются, и валы 20 и 63 согласно заданному угловому значению углового положения затормаживаются . Фактические конечные угловые положения закладываются в памят станции 41 и при следующем пуске машины или станка принимаются во внимание, при этом муфта отстающего вала сцепляется первой. Если оба да ч«ка текущего положения валов выдают одинаковые сигналы, вторая муфта также сцепляется одновременно с первой и оба вала снова вращаются
синхронно. В зависимости от вида контрольного сигнала в станции 41 управления могут быть заложены в память различные угловые тормозные пути, например, для быстрого или медленного останова машины. При этом каждый тормоз в зависимости от контрольного сигнала может быть заторможен с различным усилием при торможении. Если заданный тормозной путь будет превышен по какой-либо причине, например вследствие износа тормозных прокладок, то прорези 118-120 или 121-123 на дисках 112 и 113 могут быть смещены оператором. Они устанавливаются с угловым сдвигом ot и 2 или ft и ( одна от другой.
Если требуется, чтобы тормозной путь fb+ (f приводного вала 63 жаккардовой машины составлял 60, а тормозной путь об+ у главного вала 20 ЗО, то прорези 118-123 устанавливаются так, чтобы, например, углы ft и (f были больше углов о и f ,
При этом тормэз 70 должен, следовательно, тормозиться слабее, чем тормоз 35. При получении станцией 41 соответствующего сигнала на торможение по одному из проводов 51, оба считывающих элемента 114 и 115 приводятся в действие. Как только прорези 118 и 121 окажутся напротив считывающих элементов 114 и 115, то по контрольным проводам 40 и 124 происходит расцепление муфт 28 и 64 Валы 20 и 63 поворачиваются теперь на холостом ходу на угловой путь cf или ft . Как только прорези 119 и 122 совпадут с считывающими элементами 114 и 115, то по проводам 39 и 74 срабатывают исполнительные мех низмы 38 и 73 и вместе с ними тормоза 35 и 70 .
Контролирующий прибор 134 получает соответствующий сигнал и сообщает , например с помощью оптического указателя, что данный тормоз нуждается в подрегулировании.
При работе тормозного устройства состоящего из одного, двух или многих тормозов, целесообразно совместить текущий контроль тормозных путей с автоматической подстройкой или регулированием тормозов. При этом могут быть запрограммированы рг.зличные требуемые значения угловых тормозных путей и при работе подвергнуты текущему сравнению с фактически получаемыгли угловыми тормозными путями, причем получаемое расхождение воздействует на регулятор тормоза. В процессе торможения принимаются во внимание также желаемые конечные угловые положения валов в зависимости от того клакой причиной или каким сигналом контроля вызвано само торможение,
так как часто совсем не безразлично, при каком угловом положении, например в области 360°, вал полностью остановится. При этом могут быть запрограммированы различные конечные угловые положения валов и во время работы подвергнуты сравнению с текущими положениям-и валов. Например, если поступает команда на торможение, то в зависимости от величины разности между текущим .значением углового положения вала в данный моментИ запрограммирован ным желаемым его значением в конце торможения может быть произведено медленное (плавное ) или быстрое торможение. ,
Предположим-, что оба вала 29 и 65 вращаются синхро шо. Синхронност вращения валов может быть нарушена |И от датчиков 161 подается команда селектору 156, Селектор 156 с помощью запрограммированных в нем данных решает какой сигнал должен быть передан дальше вычислительному блоку 149: или сигнал быстрого торможения по проводу 154, или же плавного торможения по проводу 155. Причем при быстром или медленном торможении одного вала всегда второй вал не должен подвергаться плавному торможению. В случае, если плавное торможение является достаточным, вычислительный блок 149 получает соответствующий сигнал по проводу 155 вместе с контрольным сигналом по проводу 153, который указывает на то, что сигнал плавного торможения исходит от датчиков 161 и162,
Перед тем, как вычислительный блок 146 передает команды на расцепление и торможение в его память поступает сигнал текущего углового положения вала от датчиков 125 и 13 полученный по проводам 143, 151 и 15
В результате сравнения сигналов, поступивших в память блока 149, и сигналов, вызванных от блока 164 заданных положений валов, блок 149 вьщает сигнал на коммутатор 141, который по проводам 139 и 140 включает муфты 28 и 64, обеспечивающие отключение валов. Затем дается сигнал на тормоза 35 и 70, которые обе печивают останов валов в заданном положении.
После того, как оба вала заторможены полностью, блок 172 автоматической настройки тормозов сравнивает текущие, переданные по проводам 151 или 173, угловые положения валов с угловым положением, заложенным в память. Угловой дифференциал, соответствующий угловому тормозному пути, сравнивается с соответствующими значениями, заложенными в память задатчика 176 пути торможения.
Если при этом сравнении получается расхождение, например превышение заданных значений пути торможения, то по одному из проводов 168-171 из блока 172 поступает сигнал на один или оба регулятора 166 и 167 интенсивности торможения. Соответст вующий тормоз при этом автоматически подрегулируется таким образом, чтобы при следующем процессе торможения заданный тормозной путь был бы сохранен.
Экономический эффект от использования предлагаемого устройства определяется высокой надежностью в работе.
Фиг.З 60
Ю1
Si
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент Великобритании № 1142964, кл | |||
| D | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
