.
Изобретение относится к оборудованию для промышленности строительных материалов, в частности для укладки гипсовых плит на тележки, в контейнеры, на поддоны.
Известно устройство для загрузки силикатного кирпича на пропарочные вагонетки, содержащее передаточный механизм, кривошипно-шатунный механизм, съемщик-кантователь и укладчик с пневмозахватами. Съемное устройство представляет собой горизонтальную головку, поворачивающуюся периодически вокруг горизонтальной оси под действием храпового механизма, получающего движения от коленчатоговала пресса и с помощью вакуум-присо йв, ставящих кирпичи на ленту транспортера-накопителя, разворачивая в процессе переноса из положения на «плащок в положение на «ребро и выставляя в одну линию. Групповой захват подвещен к каретке и снабжен зажимными щечками, имеющими пневматический привод 1.
Однако данное устройство нельзя применить для укладки гипсовых плит.
Наиболее близким к изобретению является автомат-укладчик плит, содержащий сталкивающий механизм, установленный в направляющих, накопитель с ячейками для плит, примыкающий к сталкивателю, штабелировщик, на раме которого закреплен групповой поворотный захват с замковым механизмом, привод подъема захвата и систему управления 2.
Известный укладчик плит имеет низкую производительность и надежность вследствие больщого количества гидро- и электроаппаратуры. Кроме того, групповой захват с торцовым прижимом плит не обеспечивает надежного удержания плит при отклонении -ИХ размеров, тележка-накопитель совершает движение в двух направлениях, что ограничивает производительность вследствие на.кладки процесса сталкивания на процесс накопления.
Целью изобретения является повыщение надежности работы автомата-укладчика плит.
Поставленная цель достигается тем, что в автомате-укладчике плит, содержащем сталкивающий механизм, установленный в направляющих, накопитель с ячейками для плит, примыкающий к сталкивателю, щтабелировщик, на раме которого закреплен групповой поворотный захв-ат с замковым механизмом, привод подъема захвата и систему управления, групповой захват выполнен из прижимов, попарно соединенных системой коромысел с приводом подъема, замковый механизм содержит стакан, закрепленный на раме, и размещенный на нем двуплечий рычаг с выступом на одном конце, привод подъема захвата имеет пропущенный через стакан ползун с пазом, при этом сталкивающий, механизм выполнен в виде каретки с поворотными зацепами, а накопитель - в виде
бесконечной пластинчатой ленты, установленной с возможностью перемещения посредством храпового механизма, причем направляющие сталкивающего механизма размещены поперечно ячейками накопителя, двуплечий рычаг замкового механизма взаимосвязан с системой управления, а его выступ установлен с возможностью контакта с пазом ползуна.
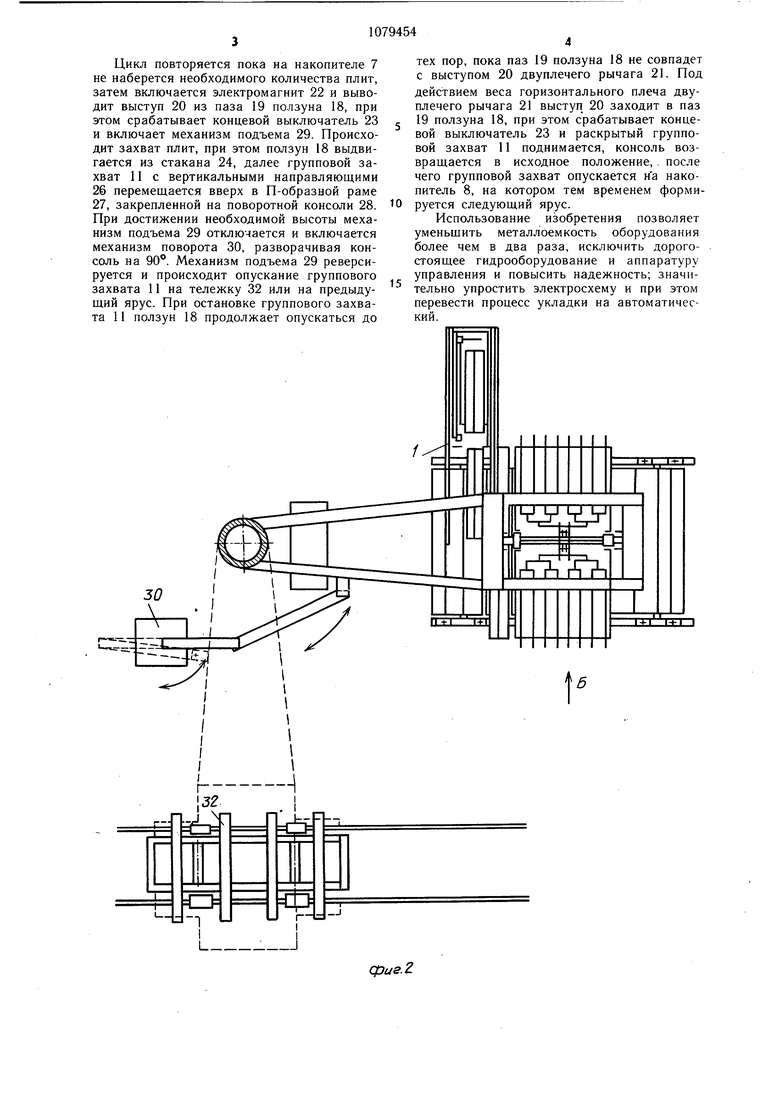
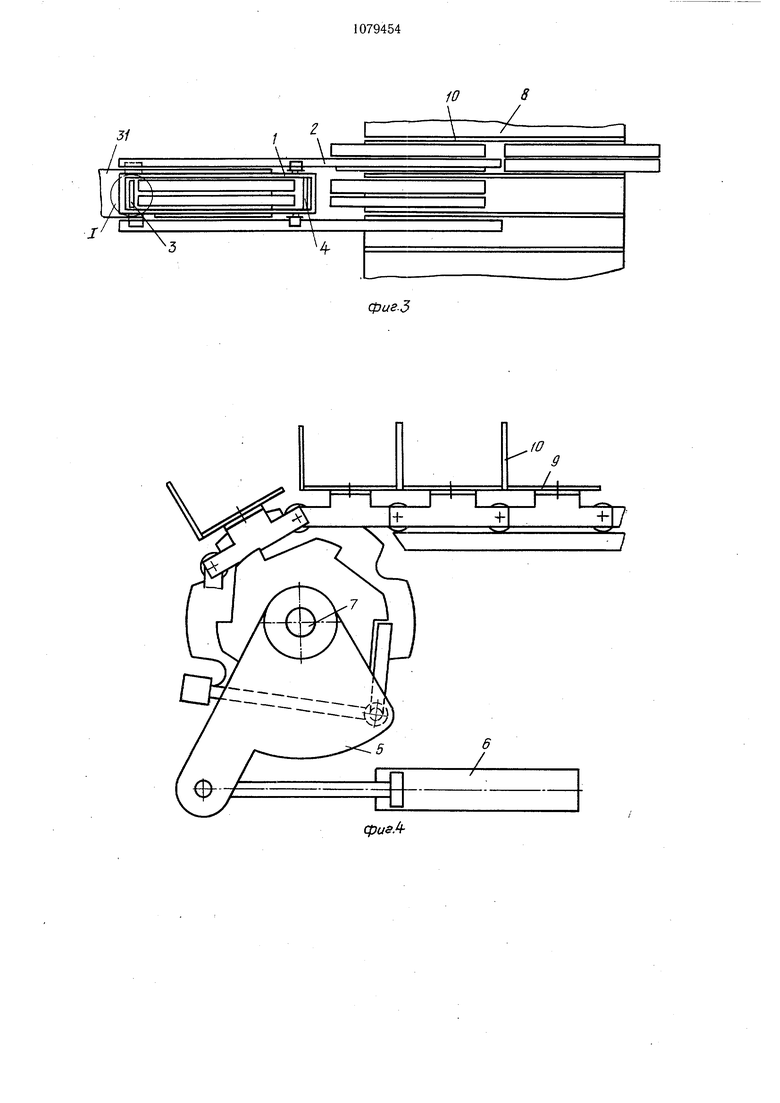
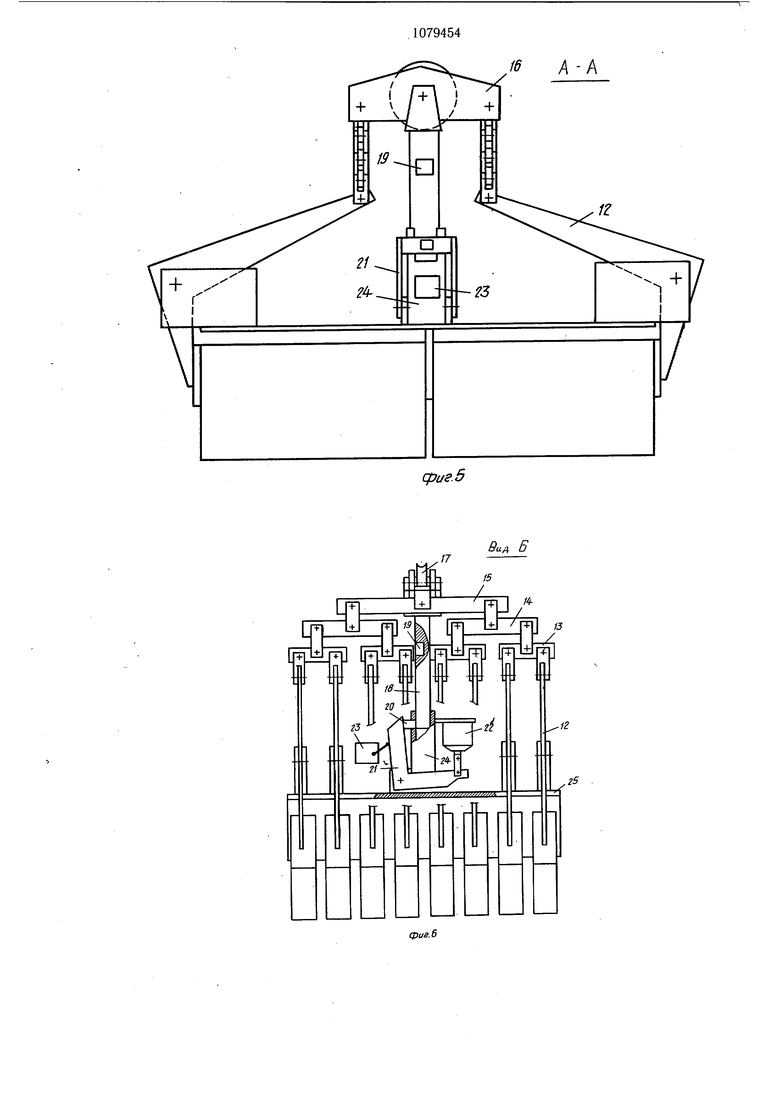
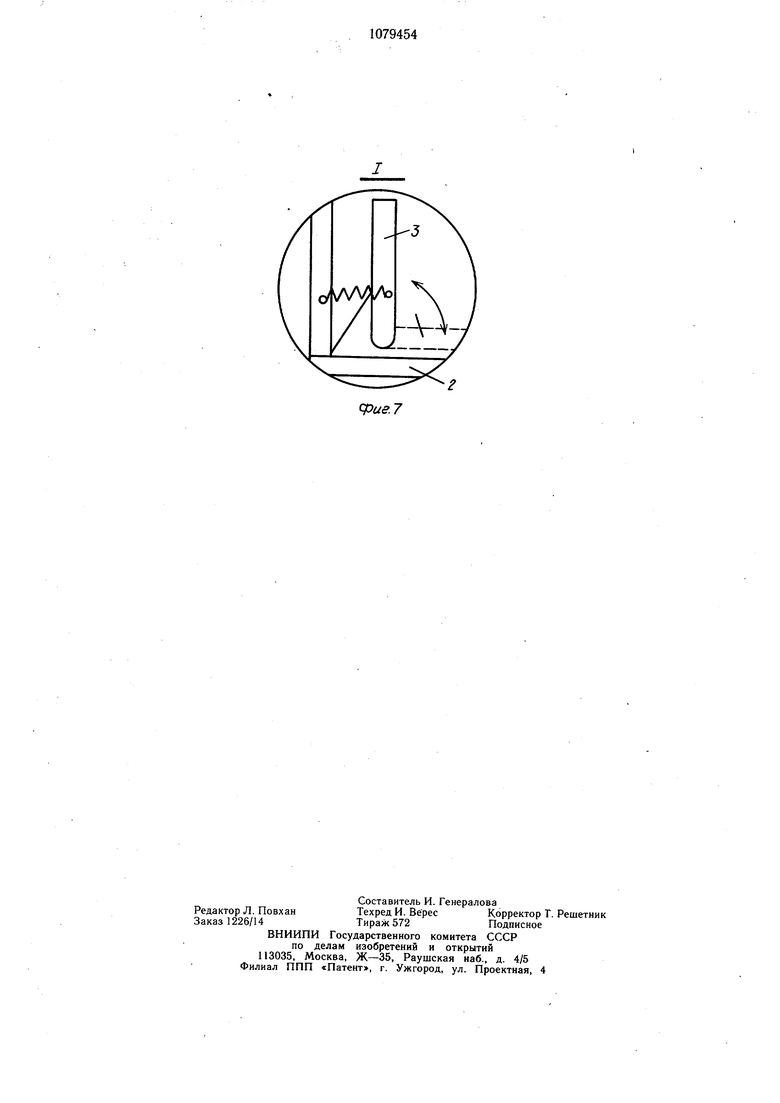
На фиг. I изображен автомат, вид спереди; на фиг. 2 - то же, в плане; на фиг. 3 - шаговый конвейер, вид сверху; на фиг. 4 - храповой механизм; на фиг. 5 - разрез А-А на фиг. 1; на фиг. 6 - вид Б на фиг. .2; на фиг. 7 -- узел I на фиг. 3.
Автомат-укладчик плит состоит из щаго5вого конвейера, представляющего собой каретку 1, перемещающуюся в продольных направляющих 2 и содержащую отклоняющиеся на вертикальной оси зацепы 3 и 4. Храповой механизм 5 связан с пневмоцилиндром 6 и приводным валом 7 накопителя 8,
0 состоящим из бесконечной пластинчатой ленты 9 с приводными цепями и перегородками 10, образующими ячейки, в которых накапливается ярус плит. Групповой захват 11 содержит торцовые прижимы 12, соединенные попарно коромыслами 13, 14, 15 и 16
5 с подъемным блоком 17, с которым соединен ползун 18, имеющий паз 19, с которым взаимодействует выступ 20 двуплечего рычага 21, соединенного с электромагнитом 22 и концевым выключателем 23. Двуплечий ры0 чаг 21 размещен на стакане 24, который закреплен на плите 25 группового захвата, к которой прикреплены вертикальные направляющие 26. Вертикальные направляющие 26 перемещаются в П-образной раме 27, закрепленной на поворотной консоли 28, на
5 которой размещены механизм подъема 29 и механизм поворота 30. Плиты подаются на автомат-укладчик ленточным транспортером 31 и укладываются на тележку 32.
Автомат-укладчик работает следующим образом.
0
От формовочной машины по ленточному транспортеру 31 отформованная пара плит поступает под каретку 1 щагового конвейера, отклоняет зацеп 3, проходит за него, при этом зацеп 3 возвращается в исходное положение и каретка 1 перемещает первую
5 пару плит на переднюю часть накопителя 8. После этого каретка 1 возвращается назад, зацеп 4 отклоняется и возвращается в исходное положение. Вторую пару плит каретка 1 перемещает зацепом 3 на место первой, при
0 этом первая пара плит перемещается зацепом 4 далее по накопителю 8. При наличии двух пар плит на накопителе 8 от концевого выключателя (на чертеже не показар включается пневмоцилиндр 6 и посредством храпового механизма 5 происходит переме5щение пластинчатой ленты 9 на одну ячейку, при этом происходит перемещение каретки 1 шагового конвейера назад.
Цикл повторяется пока на накопителе 7 не наберется необходимого количества плит, затем включается электромагнит 22 и выводит выступ 20 из паза 19 ползуна 18, при этом срабатывает концевой выключатель 23 и включает механизм подъема 29. Происходит захват плит, при этом ползун 18 выдвигается из стакана 24, далее групповой захват 11 с вертикальными направляющими 26 перемещается вверх в П-образной раме 27, закрепленной на поворотной консоли 28. При достижении необходимой высоты механизм подъема 29 отключается и включается механизм поворота 30, разворачивая консоль на 90. Механизм подъема 29 реверсируется и происходит опускание группового захвата 11 на тележку 32 или на предыдущий ярус. При остановке группового захвата И ползун 18 продолжает опускаться до
тех пор, пока паз 19 ползуна 18 не совпадет с выступом 20 двуплечего рычага 21. Под
действием веса горизонтального плеча двуплечего рычага 21 выступ 20 заходит в паз 19 ползуна 18, при этом срабатывает концевой выключатель 23 и раскрытый групповой захват 11 поднимается, консоль возвращается в исходное положение, . после чего групповой захват опускается на накопитель 8, на котором тем временем формируется следующий ярус.
Использование изобретения позволяет уменьшить металлоемкость оборудования более чем в два раза, исключить дорогостоящее гидрооборудование и аппаратуру управления и повысить надежность; значительно упростить электросхему и при этом перевести процесс укладки на автоматический.
-и. . L±J-LtJ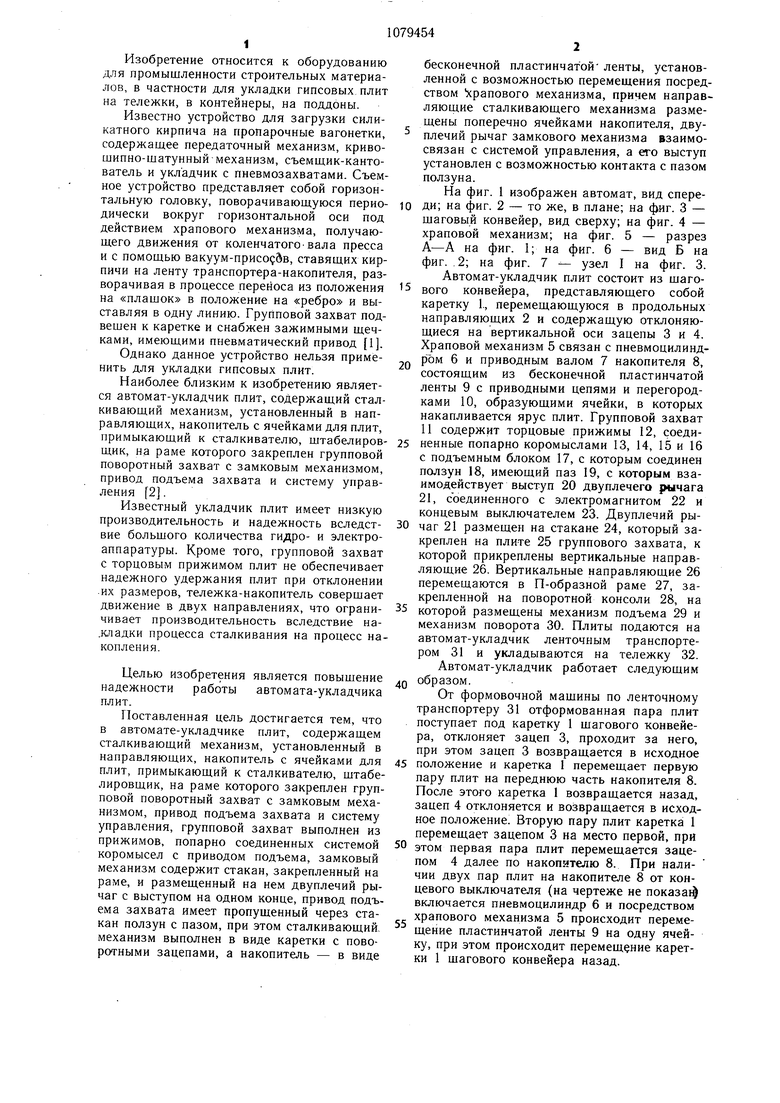
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат-укладчик плит | 1983 |
|
SU1138330A1 |
| Автоматизированный укладчик плит | 1974 |
|
SU607736A1 |
| Устройство для переноса и укладки кирпича на печную вагонетку | 1976 |
|
SU745694A1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| Устройство для укладки в пакет чушек | 1984 |
|
SU1207948A1 |
| Установка для укладки кирпича на печные вагонетки | 1979 |
|
SU893554A1 |
| Автомат-разгрузчик изделий с сушильной вагонетки | 1982 |
|
SU1033336A1 |
| Устройство для съема изделий со стола пресса | 1977 |
|
SU633734A1 |
| Установка для съема кирпича сСушильНОй ВАгОНЕТКи | 1979 |
|
SU814760A1 |
| СТРЕЛКОВОЕ ОРУЖИЕ С НЕПРЕРЫВНЫМ РЕЖИМОМ СТРЕЛЬБЫ (ВАРИАНТЫ), ФУНКЦИОНАЛЬНЫЕ УЗЛЫ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ ОДНОВРЕМЕННОГО СНИЖЕНИЯ ОТДАЧИ И УРОВНЯ ЗВУКА СТРЕЛКОВОГО ОРУЖИЯ | 2003 |
|
RU2254539C1 |
АВТОМАТ-УКЛАДЧИК ПЛИТ, содержащий сталкивающий механизм, установленный в направляющих, накопитель с ячейками для плит, примыкающий к сталкивателю, штабелировщик, на раме которого закреплен групповой поворотный захват с замковым механизмом, привод подъема захвата и систему управления, отличающийся тем, что, с целью повышения надежности работы автомата, групповой захват выполнен из прижимов, попарно соединенных системой коромысел с приводом подъема, замковый механизм содержит стакан, закрепленный на раме, и размещенный на нем двуплечий рычаг с выступом на одном конце, привод подъема захвата имеет пропущенный через стакан ползун с пазом, при этом сталкивающий механизм выполнен в виде каретки с поворотными зацепами, а накопитель - в виде бесконечной пластинчатой ленты, установленной с возможностью перемещения посредством храпового механизма, причем направляющие сталкивающего механизма размещены поперечно ячейкам накопителя, двуплечий рычаг замкового механизма взаимосвязан с системой управления, I а его выступ установлен с возможностью контакта с пазом ползуна. (П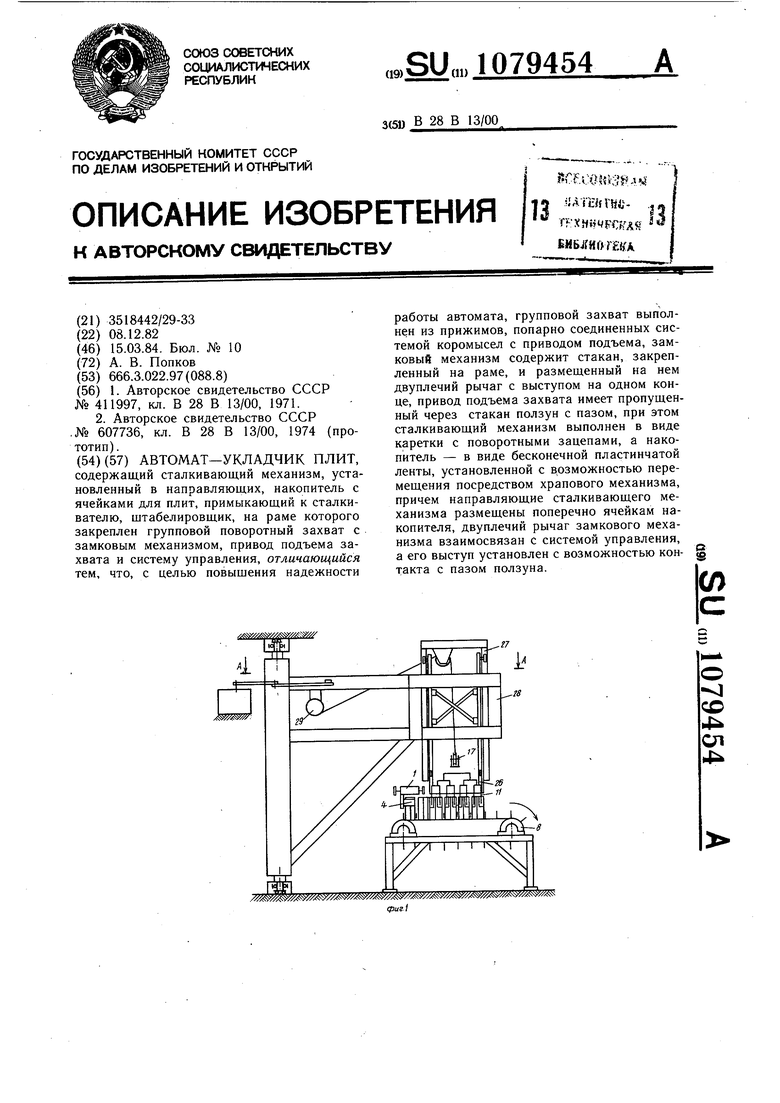
Cpus.Z
8
10
фиг.5 Лсрие.5
Вал Б А
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| 1971 |
|
SU411997A1 | |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматизированный укладчик плит | 1974 |
|
SU607736A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
