2. Устройство по п. 1, отличающееся тем, что кинематическая связь содержит зубчатое колесо, закрепленное на вертикаль- ной оси платформы под ней, две зубчатые ре йки, параллельно располоf
Изобретение относится к промьпил ен ному транспорту, в. частности к паке- тоформирующим машинам, и может быть использовано для пакетирования чушек, прершущественно клинообразных.
Целью изобретения является повышение устойчивости пакета.
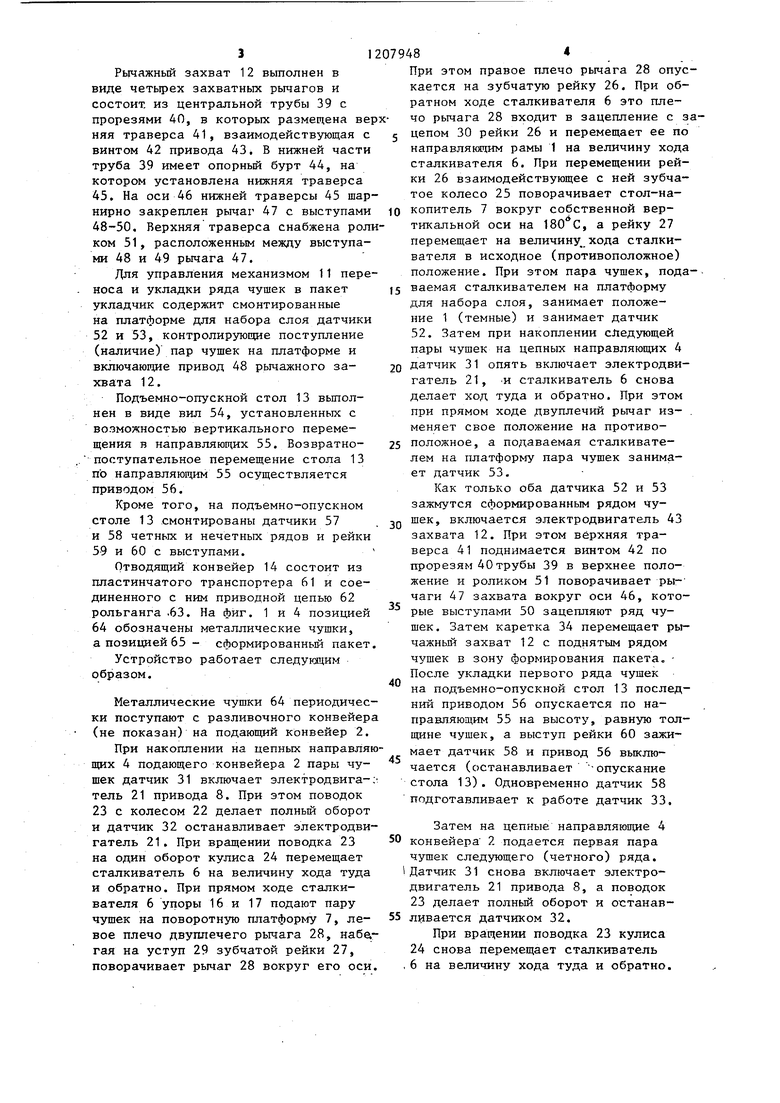
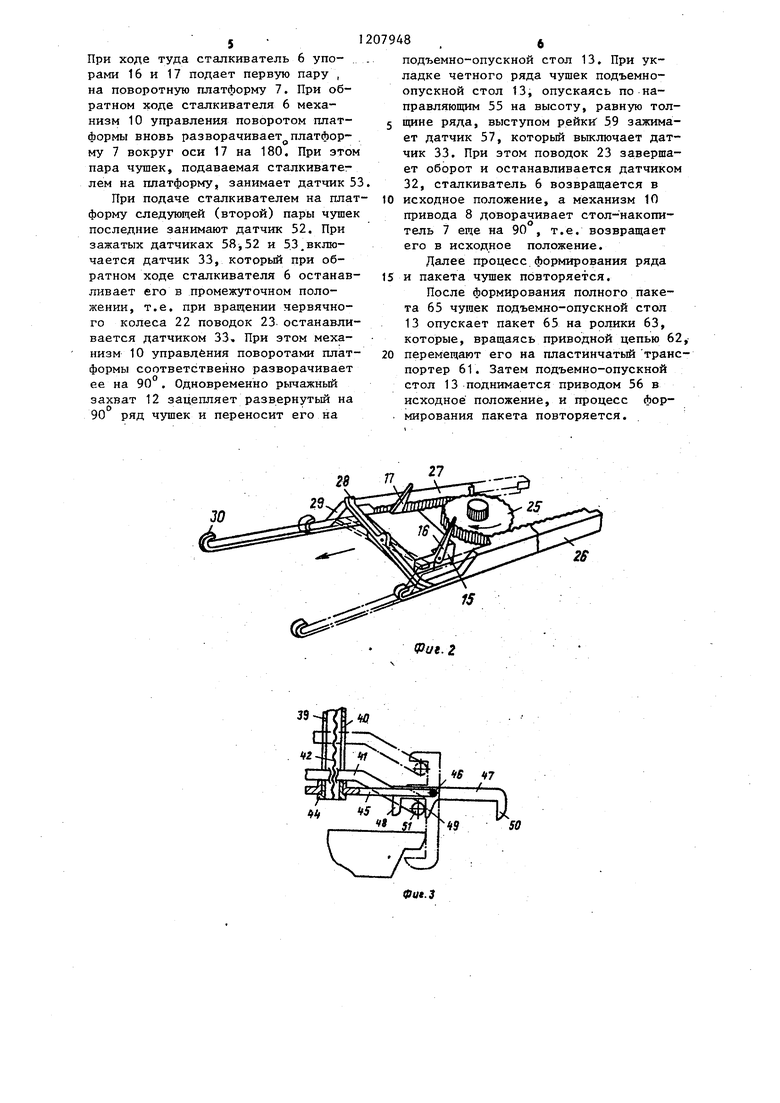
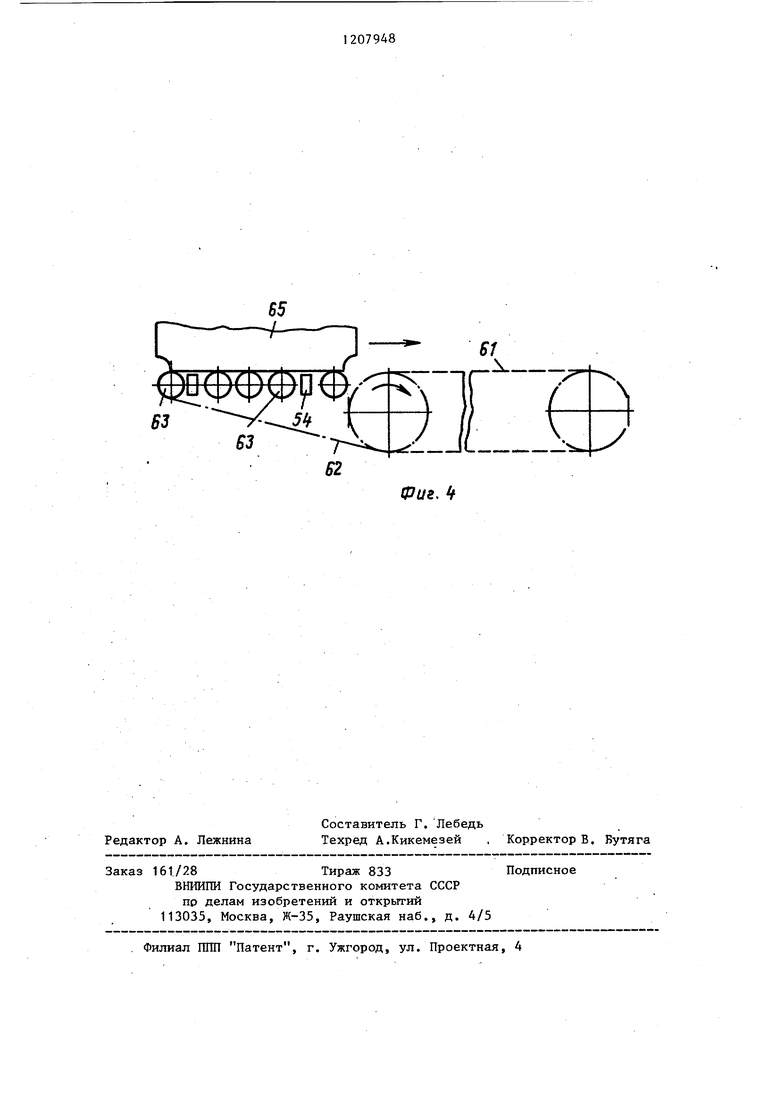
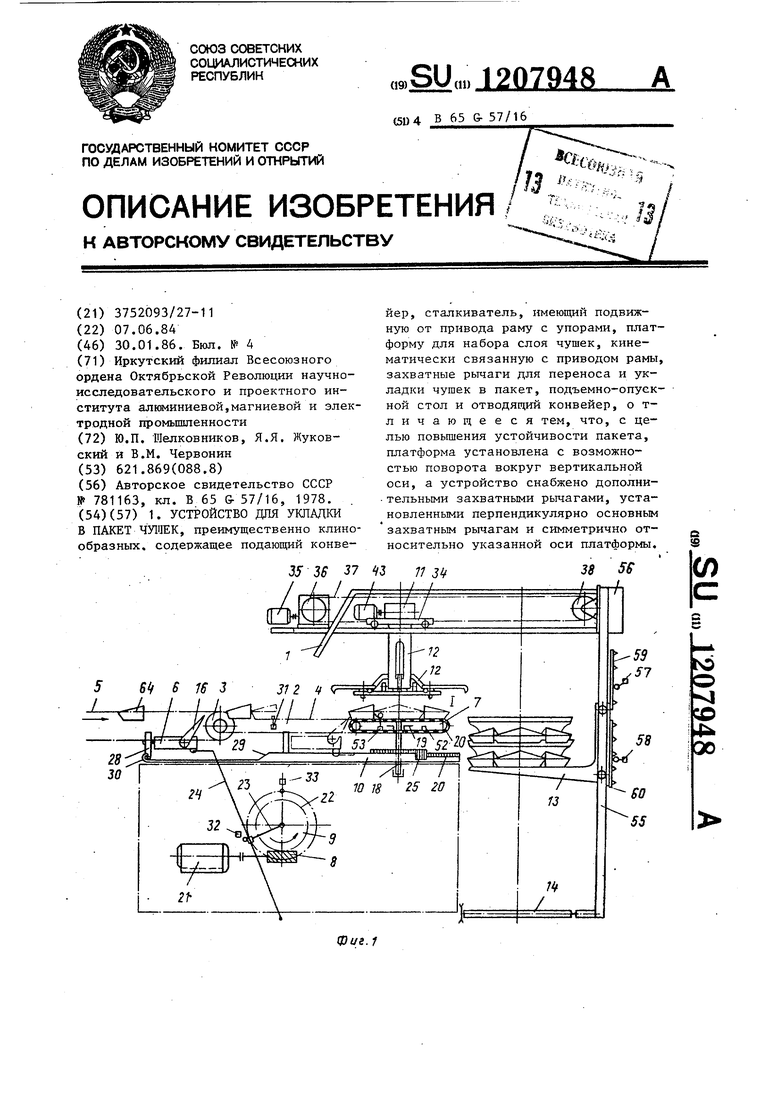
На фиг. 1 изображено устройство для укладки в пакет чушек, общий вид, на фиг. 2 -механизм управления ново- ротон стола-накопителяJ на фиг. 3 - рычажный захват} на фиг. 4 - отводящий конвейер.
Устройство для укладки в пакет чушек представляет собой простран- ственную раму 1, на которой смонтированы механизм 2 формирования ряда чушек, включающий подающий конвейер 3, состоящий из цепных направляющих 4 и приводных цепей 5, сталкиватель 6, платформа 7 для набора слоя, общи привод 8 сталкивателя и платформы для набора слоя, включающий кулисно- шатунный механизм 9 и механизм 10 управления поворотами стола-накопи- теля, механизм 11 переноса и укладки ряда чушек в пакет с рычажным захватом 12, подъемно-опускной стол 13 и отводящий конвейер 14.
Сталкиватель 6 представляет собой сварную раму 15 с двумя упорами 16 и 17, возвратно-поступательное перемещение которой в горизонтальной плоскости по направляющим рамы осуществляется приводом
Платфо1 а 7 для набора слоя выполнена в виде установленного на вертикальной, оси 18 с возможностью вращения в горизонтальной плоскости оснвания 19с цепными направляющими 20. Поворот платформы для набора слоя в горизонтальной плоскости осуществляется приводом 8.
Общий привод 8 сталкивается и плат формы для набора слоя содержит элек1207948
женные в горизонтальной плоскости с возможностью взаимодействия с указанным колесом, и двуплечий рычаг, установленньй на раме сталкивателя с возможностью взаимодействия своими плечами с соответствующими рейками.
тродвигатель 21, кулисно-шатунный .механизм 9 в виде червячного колеса 22 с поводком 23 и кулисы 24, сое- диенной со сталкивалетелем 6, и механизм 10 управления поворотами стола- . накопителя, включающий зубчатое колесо 25, жестко закрепленное на оси 18 платформы для набора слоя и находящиеся в постоянном зацеплении с зубчатьп и рейками 26 и 27, установленными с возможностью горизонтального возвратно-поступательного перемещения двуплечим рычагом 28, шар- нирно закрепленньм на сталкивателе 6. Зубчатые рейки 26 и 27 для обеспечения возможности поочередного зацепления с двуплечим рычагом 28 снабжены уступом 29 и зацепом 30.
Для управления общим приводом 8 сталкивателя и стола-накопителя на раме 1 установлены датчик 31, регулирующий количество чушек, поступающих на цепные направляющие подающего конвейера и включающий привод после накопления на них пары чущек, датчик 32 исходного, положения сталкивателя, останавливающий посл.е хода сталкивателя туда и обратно, и датчик 33 промежуточной остановки привода, останавливающий привод после укладки на платформу для набора слоя четного ряда чущек в промежуточном положении сталкивателя при его обратном ходе.
Механизм 11 переноса и укладки ряда чугаек в пакет содержит установленную подвижно на направлякядах рамы каретку 34 со смонтированным на ней рычажным захватом 12.
Возвратно-поступательное перемещение каретки 34 по направлякящм рамы 1 осуществляется приводом, состоящим из электродвигателя 35., редуктора 36, приводной цепи 37 и звездочки 38.
Рьгчажный захват 12 выполнен в виде четьфех захватньпс рычагов и состоит, из центральной трубы 39 с прорезями 40, в которых размещена веняя траверса 41, взаимодействующая с винтом 42 привода 43. В нижней части труба 39 имеет опорный бурт 44, на котором установлена нижняя траверса 45. На оси 46 нижней траверсы 45 шар нирно закреплен рычаг 47 с выступами 48-50. Верхняя траверса снабжена ролком 51, расположенным между выступами 48 и 49 рычага 47.
Для управления механизмом 11 переноса и укладки ряда чушек в пакет укладчик содержит смонтированные на платформе для набора слоя датчики 52 и 53, контролирующие поступление (наличие) пар чушек на платформе и включающие привод 48 рычажного за- хвата 12.
Подъемно-опускной стол 13 выполнен в виде вил 54, установленных с возможностью вертикального перемещения в направляющих 55. Возвратно- поступательное перемещение стола 13 по направляющим 55 осуществляется приводом 56.
Кроме того, на подъемно-опускном столе 13 смонтированы датчики 57 и 58 четных и нечетных рядов и рейки 59 и 60 с выступами.
Отводящий конвейер 14 состоит из пластинчатого транспортера 61 и соединенного с ним приводной цепью 62 рольганга .63. На фиг. 1 и 4 позицией 64 обозначены металлические чушки, а позицией 65 - сформированньй пакет
Устройство работает следукщим
образом.
Металлические чушки 64 периодически поступают с разливочного конвейер (не показан) на подающий конвейер 2.
При накоплении на цепных направлящих 4 подающего конвейера 2 пары чу- шек датчик 31 включает электродвигатель 21 привода 8. При этом поводок 23 с колесом 22 делает полньш оборот и датчик 32 останавливает электродвигатель 21. При вращении поводка 23 на один оборот кулиса 24 перемещает сталкиватель 6 на величину хода туда и обратно. При прямом коде сталки- вателя 6 упоры 16 и 17 подают пару чушек на поворотную платформу 7, ле- вое плечо двуплечего рычага 28, набегая на уступ 29 зубчатой рейки 27, поворачивает рычаг 28 вокруг его оси
При этом правое плечо рычага 28 опускается на зубчатую рейку 26. При обратном ходе сталкивателя 6 это плечо рычага 28 входит в зацепление с зацепом 30 рейки 26 и перемещает ее по направляющим рамы 1 на величину хода сталкивателя 6. При перемещении рейки 26 взаимодействующее с ней зубчатое колесо 25 поворачивает стол-накопитель 7 вокруг собственной вертикальной оси на 180 С, а рейку 27 перемещает на величину хода сталкивателя в исходное (противоположное) положение. При этом пара чушек, подаваемая сталкивателем на платформу для набора слоя, занимает положение 1 (темные) и занимает датчик 52. Затем при накоплении следующей пары чушек на цепных направляющих 4 датчик 31 опять включает электродвигатель 21, И сталкиватель 6 снова делает ход туда и обратно. При этом при прямом ходе двуплечий рычаг из- . меняет свое положение на противоположное, а подаваемая сталкивателем на плaтфop ry пара чушек занимает датчик 53.
Как только оба датчика 52 и 53 зажмутся сформированным рядом чушек, включается электродвигатель 43 захвата 12. При этом верхняя траверса 41 поднимается винтом 42 по прорезям 40 трубы 39 в верхнее положение и роликом 51 поворачивает ры- чаги 47 захвата вокруг оси 46, которые выступами 50 зацепляют ряд чушек. Затем каретка 34 перемещает ры- чажньш захват 12 с поднятым рядом чушек в зону формирования пакета, После укладки первого ряда чушек на подъемно-опускной стол 13 последний приводом 56 опускается по на- правляющиъ 55 на высоту, равную толщине чушек, а выступ рейки 60 зажимает датчик 58 и привод 56 выключается (останавливает -опускание стола 13). Одновременно датчик 58 подготавливает к работе датчик 33.
Затем на цепные направляющие 4 конвейера 2 подается первая пара чушек следующего (четного) ряда. Датчик 31 снова включает электродвигатель 21 привода 8, а поводок
23делает полный оборот и останавливается датчиком 32.
При вращении поводка 23 кулиса
24снова перемещает сталкиватель
6 на величину хода туда и обратно.
5
При ходе туда сталкиватель 6 упорами 16 и 17 подает первую пару , на поворотную платформу 7. При обратном ходе сталкивателя 6 механизм 10 управления поворотом платформы вновь разворачивает платформу 7 вокруг оси 17 на 180. При этом пара чушек, подаваемая сталкивате- лем на платформу, занимает датчик 53 При подаче сталкивателем на платформу следующей (второй) пары чушек последние занимают датчик 52, При зажатых датчиках 58,52 и 53.включается датчик 33, который при обратном ходе сталкивателя 6 останавливает его в промежуточном положении, т.е. при вращении червячного колеса 22 поводок 23. останавливается датчиком 33. При этом механизм 10 управления поворотами платформы соответственно разворачивает ее на 90°. Одновременно рычажный захват 12 зацепляет развернутый на 90 ряд чушек и переносит его на
07948ft
подъемно-опускной стол 13. При укладке четного ряда чушек подъемно- опускной стол 13, опускаясь по направляющим 55 на высоту, равную тол- 5 щине ряда, выступом рейки 59 зажимает датчик 57, который выключает датчик 33. При этом поводок 23 завершает оборот и останавливается датчиком 32, сталкиватель 6 возвращается в 10 исходное положение, а механизм 10
привода 8 доворачивает стол- накопи- тель 7 еще на 90 , т.е. возвращает его в исходное положение.
Далее процесс.формирования ряда 15 и пакета чушек повторяется.
После формирования полного пакета 65 чушек подъемно-опускной стол 13 опускает пакет 65 на ролики 63, которые, вращаясь приводной цепью 62, 20 перемещают его на пластинчатый транспортер 61. Затем подъемно-опускной стол 13 поднимается приводом 56 в исходное положение, и процесс фор- мирования пакета повторяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки в пакет металлических чушек | 1983 |
|
SU1162715A1 |
| Устройство для укладки в пакет изделий | 1985 |
|
SU1298164A1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611834A2 |
| Устройство для укладки в пакет металлических чушек | 1978 |
|
SU781163A1 |
| Устройство для укладки в пакет чушек | 1989 |
|
SU1671581A1 |
| Устройство для укладки в пакет металлических чушек | 1972 |
|
SU521202A1 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU611835A2 |
| Устройство для укладки в пакет металлических чушек | 1974 |
|
SU612874A2 |
| Автомат для укладки цилиндрических изделий в пакет | 1979 |
|
SU887385A1 |
| Способ садки кирпича на обжиговые вагонетки и установка для его осуществления | 1983 |
|
SU1143598A1 |
28 77.
30
S
26
15
iPue.2
Редактор А. Лежнина
Составитель Г. Лебедь Техред А.Кикемезей
Заказ 161/28Тираж 833Подписное
ВНИИГТИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
. Филиал ШШ Патент, г, Ужгород, ул. Проектная, 4
Фиг,
Корр ектор В. Бутя га
| Устройство для укладки в пакет металлических чушек | 1978 |
|
SU781163A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
