вращения колес, а выходы - к сравнивающему устройству.
Это позволяет как при прямолинейном движении транспортного средства, так и при его повороте производить блокировку дифференциала при меньней разнице скоростей вращения колес. В этом случае за порог срабатывания системы может быть принята разница скоростей вращения колес при движении транспортного средства по ухабам, которая меньше разницы скоростей вращения колес при повороте транспортного средства.
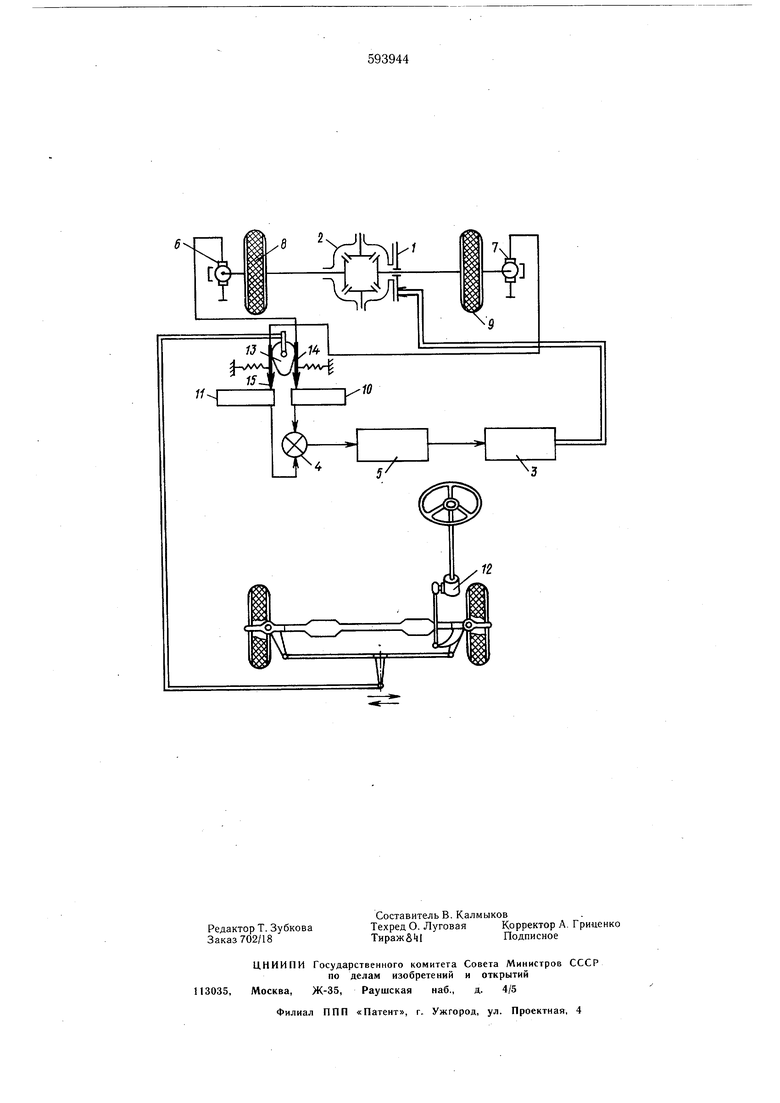
На чертеже изображена предлагаемая система автоматического управления дифференциалом ведущего моста колесного транспортного средства.
Предлагаемая система содержит фрикционную муфту 1, связывающую водило дифференциала 2 с одной из полуосей ведущего моста. Для включения фрикционной муфты 1 имеется сервомеханизм 3, через сравнивающее устройство 4 и пороговое устройство 5 управляемый датчиками 6 и 7 скоростей вращения колес 8 и 9. Между датчиками б и 7 скоростей вращения колес и сравнивающи.м устройством 4 включены регулируемые потенциометры 10 и 11. Входы каждого из потенциометров подключены к датчикам скоростей вращения колес, а выходы - к сравнивающему устройству. Потенциометры имеют привод от рулевого управления .1.2 колесного транспортного средства, с которьш кинематически через кулачок 13 связаны подвижные элементы 14 и 15 потенциометров О и 11. При прямолинейном движении транспортного средства кулачок 13 и подвижные элементы 14 и 15 потенциометра занимают положение, показанно.е на чертеже.
Предлагаемая система- работает следующим образом. При движении транспортного средства измеряют скорости вращения колес 8 и 9 ведущего моста с помощью датчиков 6 и 7. Сигналы от этих датчиков через потенциометры 10 и 11 поступают к сравнивающему устройсту 4, где они сопоставляются между собой. При наличии разницы между ними появляется сигнал, который поступает к пороговому устройству 5. При прямолинейном движении транспортного средства этот сигнал проходит потенциометры без ослабления. При этом величину порога срабатывания порогового устройства 5 назначают из условия невключения блокировки дифференциала при движении транспортного средства по ухабам, когда имеется небольшая разница между скоростями вращения колес.
При слабом сцеплении одного из колес ведущего моста с грунтом оно начинает пробуксовывать, а его скорость вращения возрастает. Когда разница скоростей вращения колес
превысит допустимую величину, равную порогу срабатывания устройства 5, на выходе порогового устройства 5 появляется сигнал, поступающий к сервомеханизму 3. Последний включается и замыкает фрикционную муфту 1, блокируя дифференциал на время, необходимое для преодоления топкого или скользкого участка пути. Разблокировку дифференциала можно производить любым известным способом, например, когда крутящие моменты на колесах 0 выравниваются.
При повороте транспортного средства, когда водитель вращает рулевое колесо, подвижный элемент одного из потенциометров смещается в сторону от положения, показанного 5 на чертеже. Тогда сигнал от датчика скорости вращения забегающего колеса ослабляется настолько, что его величина становится равной величине сигнала от датчика скорости вращения отстающего колеса (при условии движения колес по ровной дороге без скольжения и без пробуксовки).
Это предотвращает блокировку дифференциала при повороте транспортного средства на дороге с твердым -покрытием.
При повороте транспортного средства на 5 размокщей или оледеневшей дороге, если одно из колес имеет слабое сцепление с дорогой и начинает пробуксовывать, то разница в скорости вращения колес и соответственно сигнал от устройства 4 увеличивается, появляется разность сигналов, которая достигает пороговой величины, и включается сервомеханизм 3, замы кающий фрикционную муфту 1 до тех пор, пока не будет преодолен этот участок пути.
Предлагаемая, система обеспечивает своевременную блокировку дифференциала как при прямолинейном движении транспортного средства, так и при его повороте, благодаря чему проходимость транспортного средства существенно повышается.
Формула изобретения
Система автоматического управления дифференциалом ведущего моста колесного транспортного средства, содержащая фрикционную муфту, управляемую сервомеханизмом, подключенным через сравнивающее и пороговое устройства к датчикам скоростей вращения колес, отличающаяся тем, что, с целью повышения проходимости транспортного средства за счет своевременной блокировки дифференциала, она снабжена двумя регулируемыми потенциометрами, подвижные элементы которых кинематически связаны с рулевым управлением транспортного средства, при этом входы каждого из потенциометров подключены к датчикам скоростей вращения колес, а выходы - к сравнивающему устройству.
6
о / L.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1982 |
|
SU1041328A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1983 |
|
SU1081014A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| Устройство управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1162630A1 |
| Система автоматического управления дифференциалом ведущего моста колесной машины | 1977 |
|
SU673483A1 |
| Транспортное средство | 1983 |
|
SU1087375A1 |
| Транспортное средство | 1981 |
|
SU1008041A1 |
| Устройство управления блокируемым дифференциалом самоходной машины | 1990 |
|
SU1759669A1 |