щения колес при движении транспортного средства по ухабам, которая меньше разницы скоростей вращения колес ирп повороте транснортного средства.
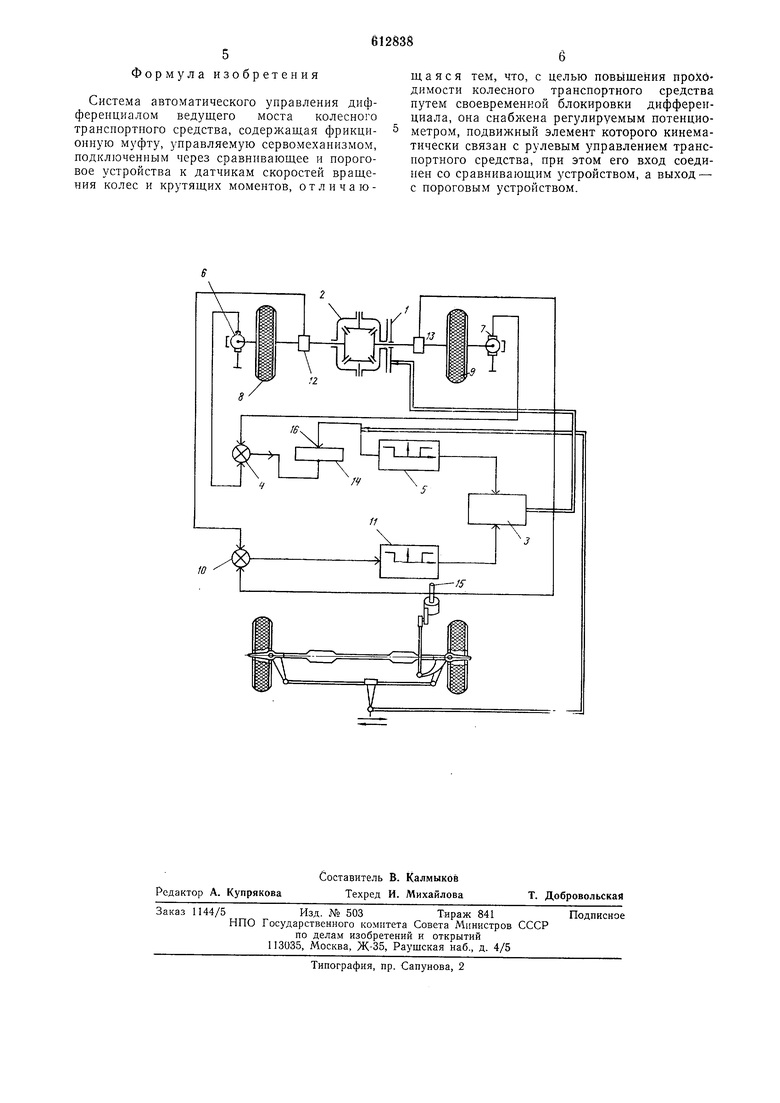
На чертеже изображена система автоматыческого управления дифференциалом ведущего моста колесного транснортиого средства.
Эта система осдержит фрикционную муфту 1, связывающую водило дифференциала 2 с одной из полуосей ведущего моста транспортного средства. Фрикционная муфта управляется сервомеханизмом 3, который через сравнивающее устройство 4 и пороговое устройство 5, например триггер Шмнтта, подключен к датчикам 6 и 7 скоростей вращения колес 8 и 9 транспортного средства, а через сравнивающее устройство 10 и нороговое устройство И - к датчикам 12 и 13 крутящих моментов на колесах. В цепи между датчиками 6 и 7 скоростей вращения колес и сервомеханизмом 3 расноложен регулируемый потенциометр 14, вход которого соединен со сравнивающим устройством 4, а выход - с пороговым устройством 5. Потенциометр 14 имеет привод от рулевого управления 15 колесного транспортного средства, с которым кинематически связан его подвижный элемент 16. При прямолинейном движении транспортного средства элемент 16 потенциометра 14 занимает среднее положение, показанное на чертеже.
Система автоматнческого управления дифференциалом ведущего моста колесного транспортного средства работает следующим образом.
При движении транснортного средства измеряют с помощью датчиков 6 и 7 скорости вращения колес 8 и 9 ведущего моста. Сигналы от этих датчиков ноступают к сравнивающему устройству 4, где сопоставляются. При наличии разницы между ними появляется сигнал, который через потенциометр 14 поступает к пороговому устройству 5. При прямолинейном движении транспортного средства этот сигнал проходит потенциометр без ослабления. При этом величину порога срабатывания порогового устройства 5 назначают из условия невключения блокировки дифференциала при движении транспортного средства по ухабам, когда имеется небольшая разница между скоростями вращения колес.
При слабол сцеплении одного из колес ведущего моста с грунтом оно начинает пробуксовывать, а его скорость вращения возрастает. Когда разница скоростей вращения колес превысит допустимую величипу, равную порогу срабатывания устройства 5, на выходе порогового устройства 5 появляется гги-л;)., поступающий к сервомеханизму 3. Последпий включается и замыкает фрикционную муфту 1, блокируя дифференциал 2. После блокировки дифференциала нагрузка на полуоси ведущего моста перераспределяется. В эт-лм случае колесо, имеющее слабое сцетглепие с
грунтом, передает мньшую часть крутящего момента от двигателя, а другое колесо передает большую его часть. Появляюшаяся разница крутящих моментов па колесах замеряется датчиками 12 и 13, сигпалы от которых сопоставляются в сравнивающем устройстве 10. От сравнивающегося устройства 10 сигнал поступает к пороговому устройству 11 и далее - к сервомеханизму 3. Пока величина сигнала, поступающего к сервомеханизму 3 от сравнивающего устройства 10, больше порога срабатывания устройства 11, фрикционная муфта 1 остается замкнутой, а дифференциал 2 заблокированным. Пороговую величину устанавливают из условия, чтобы она была больше крутящего момента на колесах при движении транснортного средства по дороге с твердым покрытием с малым сопротивлением качанию колес. Когда сцепление с грунтом буксовавшего колеса улучшится, последнее начнет передавать больший крутящий момент. При этом крутящий момент на другом колесе этого моста станет соответственно меньше, т. е. разность крутящих моментов на колесах уменьшится. Когда эта разность станет меньше пороговой величины, устройство И отключает сервомеханизм 3, фрикционная муфта 1 размыкается и дифференциал 2 разблокируется.
При повороте транспортного средства, когда водитель вращает рулевое колесо, подвижный элемент 16 нотенциометра 14 смещается в сторону от среднего положения. Благодаря этому сигнал от сравнивающего устройства 4 ослабляется, что предотвращает блокировку дифференциала при повороте транснортного средства на дорогах с твердым покрытием. В этом случае порог срабатывания как бы повышается, и величина его соответствует разности сигналов от датчиков скоростей колес при этом повороте. Пороговое устройство 5 срабатывает только в том случае, когда за счет пробуксовывания одного из колес разность их скоростей станет больше их разности при повороте на дороге с неровным твердым покрытием. При повороте транспортного средства на размокшей грунтовой дороге, или, например, пашне, если одно из колес имеет слабое сцепление с грунтом и начинает пробуксовывать, то разница в скорости вращения колес и соответственно сигнал от устройства 4 увеличивается, достигает пороговой величины, и происходит включение сервомеханизма 3, замыкающего фрикционную муфту 1 до тех нор, пока не будет преодолен этот участок пути.
Описанная система автоматического управлспня дифферепцналом ведущего моста колесного транспортного средства обеспечивает своевременную блокировку дифференциала при движении но участку нути с неодинаковыми сценнымн свойствами левой и правой колеи, благодаря чему проходимость транспортного средства сун1,ествепно повышается.
Формула изобретения
Система автоматического управления дифференциалом ведущего моста колесного транспортного средства, содержащая фрикционную муфту, унравляемую сервомеханизмом, нодключенным через сравнивающее и пороговое устройства к датчикам скоростей вращения колес и крутящих моментов, отличающ а я с я тем, что, с целью повышения проходимости колесного транспортного средства путем своевременной блокировки дифференциала, она снабжена регулируемым потенциометром, подвижный элемент которого кинематически связан с рулевым управлением транспортного средства, при этом его вход соединен со сравнивающим устройством, а выход- с пороговым устройством.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1983 |
|
SU1081014A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1982 |
|
SU1041328A1 |
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| Система автоматического управления дифференциалом ведущего моста колесной машины | 1977 |
|
SU673483A1 |
| Устройство управления блокировкой дифференциала транспортного средства | 1984 |
|
SU1162630A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ДИФФЕРЕНЦИАЛОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2000 |
|
RU2240934C2 |
| Тормозная система транспортного средства | 1983 |
|
SU1115944A1 |
| Способ автоматической блокировки дифференциала ведущего моста колесной машины | 1975 |
|
SU544571A1 |
