Изобретение относится к транспортном машиностроению, а к системам управления трансмиссиями и касается блокировки дифференциала ведущего моста тягового колесного средства.
Известно, что автоматическое, улравпе- ние дифференцтшпом ведущего моста тягового колесного средства является основой управления ходовыми системами, обусловл1шающим улучшение в 2,5-3 раза ycToft4vmocTH прямопинейного движения в междурядьях и при выполнении других энергонасыщенных операций и повышает эффективность использования их возможностей по созданию тяги в среднем на 1 5-20%. Это позволяет сократить в 2-3 раза копкчество управляющих воздействий повысить точность управления и работоспособность систем автоматического вожде тш.
Поэтому при работе с опредепенной крюковой нагрузкой следует блокировать дифференциал даже при работе тягового, средства без разности скоростей вра.щения И крутящих моментов ведущих колес, но при движении с незначительной крюковой нагрузкой и без разности скоростей вращения колес дифференциал должен быть разблокирован.
Известна система автоматического управления дифференциалом ведущего моста тягового колесного транспортного средства, содержащая фрикционную муфту, управляемую сервомеханизмом, подкию- ченным через сравн1шающее и пороговое устройство к датчикам скоростей вращения колес и с двуг11я регулируемыми потенциометрами, подвижные элементы которых кинематически связаны с управлением, в коды каждого из потендиометров подктаочеиы к датчикам скороотей вращения копес, а выходы - к сравкивающему устройству ij ,
Недостатками этой системы является то, что она не обеспечивает режима стабильиого блокирования ведущих колес при опредепетюй крюковой нагрузке и одинаковой скорости вращения ведущих колес. Кроме того, системе присущ нежепатеньный циклический режим работы на участках дороги с различными сцепными условиями в контакте шина - опорная поверхность, на ; таком участке появляется разность скоростей вращения ведущих колес, дш})ференцтап блокируется, выравниваются скорости вращения колес, разность с цгкалов датчиков скорости вращения колес становится равной нулю.
дифференциал разблокируется, но еспи та- кой участок дороги не окончился, то сиотема повторяет цикл работы, что снижает скорость движения и снижает устойчивость Движения, системе присущ конст руктивный недостаток - применение двух регулируемых потенциометров, подвижные элементы которых кинематически связаны с рулевым механизмом, что усложняет конструкцию системы и снижает ее долговечность.
Известна система автоматического управления дифференциалом ведущего моста колесного средства, содержащая фрикционную гидроуправляемую муфту, соединенную через эпектрогидравлический усилитель, сравнивающее и два пороговых устройства с датчиками скоростей враще1шя копес и крутящих моментов и с регулир -емым потенциометром, подвижный элемент которого кинематически связан с рулевым управлением |j2l.
Недостатками данной системы являются то, что она не обеспечивает блокирование дифференциала при работе тягового средства с определенной крюковой нагрузкой и в одинаковых стягово-сцепных условиях левого и правого колес, кроме того, для измерения крутящих моментов на полуосях необходимы датчики, обладающие достаточной надежностью и долговечностью в условиях сельскохозяйстве ного производства.
Цель изобретения - улучшение тяговоэксппуатационных характеристик колесного средства путем обеспечения блокировки дифференциала при опредепенной крюковой нагрузке.
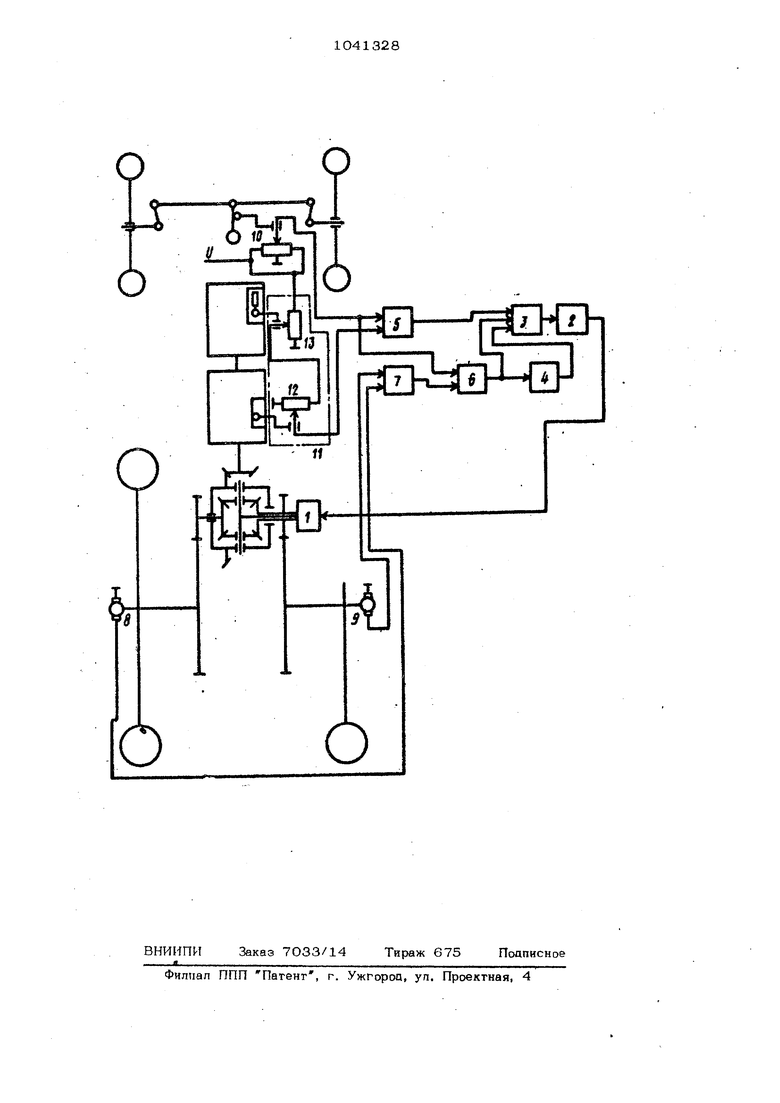
Поставленная цель достигается тем, что система автоматического управления дифференциалом ведущего моста Тягового колесного средства, содержащая фрикционную гидроуправпяемую муфту, соединенную через эпектрогидравлический усилитель, сравнивающее и два пороговых устройства с датчиками скоростей вращения колес и регулируемым потенциометром, подвижный элемент которого связан с рулевым управлением, снабжена блоком определения сигнала о величине крутящего момента на ведущих полуосях, соединенного с входом первого порогового устройства, трехвходовым элементом ИЛИ и реле времени, при этом вход последнего связан с выходом второго порогового устройства, а вь1ход - с одним из входов тре хвходового элемента ИЛИ, входы которого подключены к выходам соот310Бвтсгвующих сравнивающих устройств, а выход - к упомянутому эп ктрогвдравлическому усилитепр. Кроме того, блок определения сигнала о величине крутящего момента на ведущих полуосях представляет собой электрически последовательно соединенные регу лируемые потенциометры, вход одного из которых соединен с источником постоянного напряжения, а выход другого - с входом первого порогового устройства, причем подвижные элементы потенциометров кинематически связаны соответст- венно с рейкой топливного насоса и рычагом переключения передач. Кроме того, средняя точка регулируемого потенциометра, кинематически связанного с рулевым управлением, соединена с нулевой точкой, а крайние - с источником питания постоянного тока. На чертеже изображена предлагаемая система автоматического управления дифференциалом тягового колесного средства Система содержит фрикционную гидроуправляемую муфту 1, соединенную через электрогидравлический усилитель 2, тре входовой элемент ИЛИ 3, реле 4 време ни, первое 5 и второе б пороговые устройства, сравнивающее устройство 7 с . датчиками 8 и 9 скоростей вращения ведущих колес, регулируемым потенциометром 10, подвижный элемент которого кинематически связан с рулевым управлением и с выходом блока 11 определения сигнала-аналога крутящего момента на полуосях, выполненного в виде последовательно соединенных датчиков 12 вклк ченной передачи и нагрузки двигателя 13 Два входа трехвходового элемента ИЛИ 3 соединены с выходом первого 5 и второго 6 пороговых устройств, а третий через реле 4 времени - с выходом второ го порогового устройства 6. Первое пороговое устройство 5 соединено с выходами датчиков 10 и 12, а второе порого вое устройство 6 - датчика 10 и сравнивающего устройства 7, входы которого подключены к выходам датчиков 8 и 9. Последовательное соединение регулируемых потенциометров 12 и 13, когда выход одного из регулируемых потенциометров, например 13, связан с входом регулируемого потенциометра 12, а вход - с источником постоянного напряжевия и , обеспечивает пропорциональность выходного сигнала регулируемого потенциометра 12 с суммарным крутящим 26 моментом на полуосях или с крюковой нагрузкой тягового колесного средства. Подключение регулируемого потенциометра 10, подвижный элемент которого кинематически связан с рулевым управлением, при котором средняя точка потенциометра подключена к нулевой точке системы, и крайние - к источнику постоянного напряжения U , обусловливает появление напряжения на выходе этого потенциометра, пропорционального отклонению pyijeBoro управления независимо от направления поворота тягового колеоного средства. Система работает следующим образом. Трехвходовой элемент ИЛИ 3 выдает командный сигнап к электрогидравличао кому усилителю 2 и муфте 1 на блокировку дифференциала при появлении cfy пенчатого сигнала хотя бы на одном из его входов. На первом входе появляется сигнал, если крюковая нагрузка станет больше заранее установленной, с учетом угла поворота управляемых колес, т.е. если сигнал, поступающий от регулируемого потенциометра 12 к первому пороговому устройству 5 превысит пороговое значение, определенное с учетом значения сигнала, поступающего от peryjiHpjfe мого потенциометра 10. На втором вход появляется сигнал при превыщении разнос ти, определенной сравнивающим устройств вом 7, сигналов датчиков 8 и 9 скоростей вращения ведущих колес порогового значения, определенного вторым пороговым устройством 6. Одновременно с сигналом на втором входе появляется cttruan на третьем входе и наблюдается этот сигнал на промежутке времени, необхоц мом для преодоления участка дороги с различными сцепными характеристиками ведущих колес. При движении тягового колесного средства по твердой дороге с нагрузкой меньщей пороговсяго значения, на входах трехфазного элемента ИЛИ 3 сигналов . нет, на его выходе также нет командного сигнала, дифференциал разблокирован. Если скорость вращения одного из веду щих колес увеличивается, при попадании его на скользкий участок опорной поверхности, на выходе сравнивающего устройства 7 появляется разность сигналов датчиков 8 и 9 скоростей вращения ведущих колес. При превыщенив згой разввцы порогового значения на выходе второго порогового устройства 6 появляется ступенчатый сигнал, который, псх;ту11ив
на второй вход трехфазного апемента Ir-LnM 3, вызывает появление командного сигнала на его выходе, который посредсгвом электрогвдравпического усипитепя 2 и ({:1рикциошюй гкдроуправляемой муфты 1 блокирует дифференциал. Одновременно с подачей ступенчатого сигнатш от второго порогового устройства 6 на второй вход трехразового элемента ИЛИ 3 этот сигнал подается и на вход репе 4 времени, вызывая появление на его вы« коде, и, следовательно, на третьем вход трехвходового элемента ИЛИ 3 ступе чатого сютюпа. После блокировки о1Иффере Ш1шпа скорости вращения ведущих копес выравниваются, значения сигнанов датчиков 8 и 9 становятся одинаковыми, на выходе второго порогового устройства 6 и на втором входе трехвходового элемента ИЛИ 3 сигнал пропадает. Однако на выходе репе 4 времени сигшш еще наблюдается определенное время, необходимое tia преодоление скользкого участка дороги, что обеспечивает с помощью элемента ИЛИ 3 электрического сипителя 2 и гидроуправ71яемой фрикдионюй муфты 1 блокировку дифференциала.
При работе колесного тягового средства со зиачитепьной тяговой нагрузкой на выходе первого порогового устройства 5 появляется сигнал, который, поступая на первый вход трехвходового элемента ИЛИ 3, эпектрогидравлический усилитель 2 и пздроуправляемую муфту 1, вызывает бгоки ювку дифференциала.
Система автоматического утгравления дифференциалом ведущего моста обеспечивает продолжительный режим движения тягового колесьгого средства с заблокированным дифференциалом при значительной крюковой нагрузке, даже при одинаковых скоростях вращения ведущих колес, что улучшает в 1,5-2,5 раза устойчивость прямолинейного движения. Как показывают исследования, это обуславливает повышение эксплуатационной скорооти движения машинно-тракторных агрегатов с тяговым колесным средством к, следовательно, производительность на 4-5%, снижение расхода топлива до 5%, кроме того, улучшаются условия труда механизатора, так как он расходует меньше психо-физической нагрузки на управление агрегатом.

| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления дифференциалом ведущего моста тягового колесного средства | 1983 |
|
SU1079484A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| Механизм блокировки дифференциала ведущего моста колесной машины | 1983 |
|
SU1115928A1 |
| Мобильное энергетическое средство | 1987 |
|
SU1416342A1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Трансмиссия секционной колесной машины, преимущественно трактора с шарнирно-сочлененной рамой | 2022 |
|
RU2796857C1 |
| Система автоматического управления дифференциалом ведущего моста колесной машины | 1977 |
|
SU673483A1 |
| Автоматическое устройство управления дифференциалом ведущего моста транспортного средства | 1985 |
|
SU1301731A1 |
| Устройство автоматического управления блокировкой дифференциала транспортного средства | 1987 |
|
SU1418091A1 |
1. СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДИФФЕРЕНЦИАЛОМ ВЕДУИЩЮ МОСТА ТЯЮВОГО КОЛЕСНОГО СРЕДСТВА, содержащая фрикционную гидроуправпяемую муфту, соединенную через эпектрогидравпический усипитепь, сравнивающее и два пороговых ycDройства с датчиками скоростей вращения лопес и регулируемым потенциометром, подвижный элемент которого связан с рулевым управлением, отпича ющ а я с я тем, что, с цепью улучшения тягово-эксппуатацио П1Ых характеристик колесного средства путем обеспечения блокировки дифференциала при определенной крюковой нагрузке, она снабжена блоком определения сигнала о величине кру .тящего момента на ведущих полуосях, соединенного с входом первого порогового устройства, трехвходовым элементом ИЛИ и репе времени, при этом вход последнего связан с выходом второго порогового устройства, а вы код - с одним вз входов трехвходового элемента ИЛИ, входы которого подключены к выходам соответствующих сравнивающих устройств, а выход к упомянутому эпектрогидравлическому усилителю. 2.Система по п. 1, отличающая с я тем, что бпок опредепения сигнала о величине крутящего момента i на ведущих полуосях представляет собой электрически последовательно соединен(Л С ные регулируемые потенциометры, вход одного из которых соединен с источником постоянного напряжения, а выход другого - с входом первого порогового устройства, причем подвижные элементы потенциометров кинематически связаны соответственно с рейкой топливного насоса и рычагом переключетга передач. 3.Система по пп. 1 и2,отпи;чающаяся тем, что средняя точка регулируемого потенциометра, кинемати-, чески связанного с рулевым управпекием, соединена с нулевой точкой, а крайние с источником питания постоянного тока.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU593944A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система автоматического управления дифференциалом ведущего моста колесного транспортного средства | 1976 |
|
SU612838A1 |
