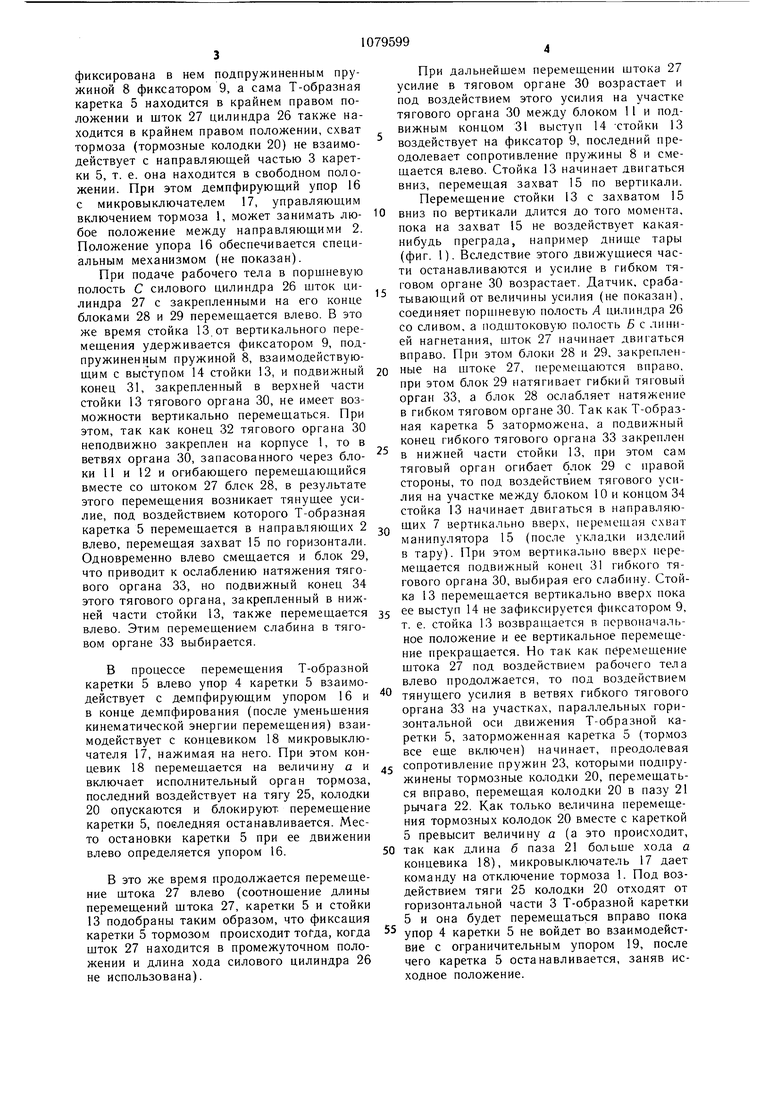
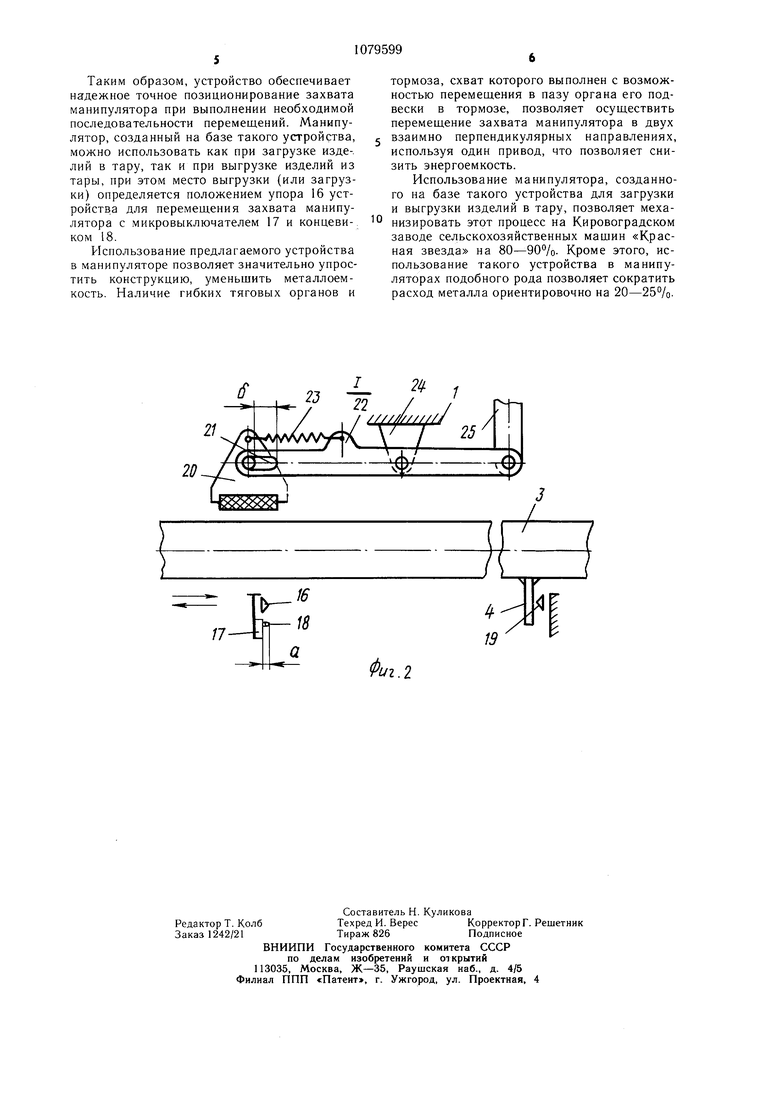
Изобретение относится к машиностроению, в частности к средствам автоматизации югрузо-разгрузочных операций при укладке изделий в тару, и может .быть использовано в манипуляторах для погрузо-разгрузочных работ. Известно устройство для перемещения захвата манипулятора, содержащее корпус с горизонтальными направляющими, демпфирующий и ограничительный упоры, гидроцилиндр, соединенный кинематически с установленной в направляющих корпуса кареткой, имеющей на одном конце направляющие размещенные перпендикулярно направляю1ЦИМ корпуса, расположенную в направляющих каретки тягу с захватом и выступом на одном из концов 1. Однако такая конструкция сложна и Металлоемка. Для перемещения захвата 1еха1Н1ческой руки в каждом из двух направлений (вертикальном и горизонтальном) необходим свой силовой цилиндр, что увеличивает энергоемкость конструкции, кроме этого, вследствие того, что силовые цилиндры разменяны на движущихся частях, один из них перемещает другой и энергия расходуется нерационально. Устройства, обеспечивающие величину и точность перемещения захвата механической руки, сложны (червячный редуктор) и ненадежны в работе Движущиеся части конструкции очень металлоемки, что, в свою очередь, приводит к увеличению энергии движущихся масс, гашение этой энергии происходит при взаимодействии движущихся частей с упорами, что снижает надежность и долговечность работы конструкции. Основным недостатком конструкции является то, что ее кинематика не позволяет осуществить перемещение захвата механической руки в двух направлениях от одного привода, и это резко увеличивает металлоемкость и энергоемкость конструкции. Высокая металлоемкость движущихся частс затрудняет точное позиционирование захвата руки, так как при этом необходимо гасить энергию движущихся масс, а она тем больи1е, чем больще масса движущегося тела (Е ). Кроме того, данную конструкцию нельзя использовать для автоматической выгрузки изделия из тары или автоматической загрузки изделий в тару. Целью изобретения является снижение его металлоемкости. Поставленная цель достигается тем, что устройство для перемещения захвата манипулятора, содержащее корпус с горизонта.льными направляющими, демпфирующий и ограничительный упоры, гидроцилиндр, соединенный кинематически с установленной в направляющих корпуса кареткой, имеющей на одном конце направляющие, размещенные перпендикулярно направляющим корпуса, и расположенную в направляющих каретки тягу с захватом и выступом на одном из концов, снабжено фиксатором, размещенным на каретке с возможностью взаимодействия с выступом тяги, установленным в корпусе на подвеске между упорами тормозом для каретки и органом управления тормозом, расположенным на демпфирующем упоре, а кинематическая связь гидроцилиндра с кареткой включает в себя блоки, два из которых закреплены на щтоке гидроцилиндра, два других - на первом конце каретки по разные стороны от ее горизонтальной оси и один - на втором конце каретки соосно с ее горизонтальной осью, и огибающие блоки, два тяговых органа, неподвижные концы которых закреплены на корпусе и подвижные на соответствующих концах тяги. На фиг. 1 изображено устройство для перемещения захвата манипулятора; на фиг. 2 - узел I на фиг. 1. Устройство содержит корпус 1 с направляющими 2, в которых размещена направляющая часть 3 с упором 4, Т-образную каретку 5, на одном конце которой расположен корпус 6 с направляющими 7 с закрепленным в нем подпружиненным пружиной 8 фиксатором 9. На Т-образкой каретке 5 размещены по разные стороны от оси ее движения (от оси направляющей части 3) блоки Ш и 11, а по оси блок 12. В направляющих 7 каретки размещена стойка 13 с выступом 14 и захват манипулятора 15. На корпусе I установлен также демпфируемый упор 16 с микровыключателем 17 и концевиком 18 (не показан) и ограничительный упор 19. В корпусе устройства 1 закреплен тормоз (фиг. 2). Схват тормоза выполнен в виде тормозных колодок 20, установленных с возможностью перемещения в пазу 21 рычага 22, при этом тормозные колодки 20 подпружинены пружиной 23, которая удерживает их в крайнем левом положении паза 21, при этом рычаг 22 закреплен на опоре 24 в корпусе 1 и при помощи тяги 25 связан с исполнительным органом тормоза (не показан). На корпусе 1 закреплен гидроцилиндр 26 со щтоком 27 с закрепленными на нем блоками 28 и 29. Устройство снабжено тяговым органом 30, подвижный конец которого 31 закреплен на стойке 13, и запасованным через блоки 11, 12и 28, а неподвижный конец 32 закреплен на корпусе 1 и тяговым органом 33, подвижный конец которого 34 закреплен на стойке 13по другую сторону от оси движения каретки 5 и запасованным через блок 10 огибающим при этом блок 29 на штоке 27 противоположно тяговому органу 30, а неподвижный конец 35 закреплен на корпусе 1. Порщневая полость силового цилиндра 26 обозначена А, а подщтоковая полость Б. Устройство работает следующим образом. В исходном положении стойка 13 находится в верхнем крайнем положении и зафиксирована в нем подпружиненным пружиной 8 фиксатором 9, а сама Т-образная каретка 5 находится в крайнем правом положении и шток 27 цилиндра 26 также находится в крайнем правом положении, схват тормоза (тормозные колодки 20) не взаимодействует с направляющей частью 3 каретки 5, т. е. она находится в свободном положении. При этом демпфирующий упор 16 с микровыключателем 17, управляющим включением тормоза 1, может занимать любое положение между направляющими 2. Положение упора 16 обеспечивается специальным механизмом (не показан).
При подаче рабочего тела в поршневую полость С силового цилиндра 26 шток цилиндра 27 с закрепленными на его конце блоками 28 и 29 перемещается влево. В это же время стойка 13,от вертикального перемещения удерживается фиксатором 9, подпружиненн ым пружиной 8, взаимодействующим с выступом 14 стойки 13, и подвижный конец 31, закрепленный в верхней части стойки 13 тягового органа 30, не имеет возможности вертикально перемещаться. При этом, так как конец 32 тягового органа 30 неподвижно закреплен на корпусе 1, то в ветвях органа 30, запасованного через блоки 11 и 12 и огибающего перемещающийся вместе со штоком 27 блок 28, в результате этого перемещения возникает тянущее усилие, под воздействием которого Т-образная каретка 5 перемещается в направляющих 2 влево, перемещая захват 15 по горизонтали. Одновременно влево смещается и блок 29, что приводит к ослаблению натяжения тягового органа 33, но подвижный конец 34 этого тягового органа, закрепленный в нижней части стойки 13, также перемещается влево. Этим перемещением слабина в тяговом органе 33 выбирается.
В процессе перемещения Т-образной каретки 5 влево упор 4 каретки 5 взаимодействует с демпфирующим упором 16 и в конце демпфирования (после уменьшения кинематической энергии перемещения) взаимодействует с концевиком 18 микровыключателя 17, нажимая на него. При этом концевик 18 перемещается на величину а и включает исполнительный орган тормоза, последний воздействует на тягу 25, колодки 20 опускаются и блокируют перемещение каретки 5, поеледняя останавливается. Место остановки каретки 5 при ее движении влево определяется упором 16.
В это же время продолжается перемещение штока 27 влево (соотношение длины перемещений штока 27, каретки 5 и стойки 13 подобраны таким образом, что фиксация каретки 5 тормозом происходит TOf-да, когда шток 27 находится в промежуточном положении и длина хода силового цилиндра 26 не использована).
При дальнейшем перемещении штока 27 усилие в тяговом органе 30 возрастает и под воздействием этого усилия на участке тягового органа 30 между блоком 1I и подвижным концом 31 выступ 14 -стойки 13 воздействует на фиксатор 9, последний преодолевает сопротивление пружины 8 и смещается влево. Стойка 13 начинает двигаться вниз, перемещая захват 15 по вертикали. Перемещение стойки 13 с захватом 15
вниз по вертикали длится до того момента, пока на захват 15 не воздействует какаянибудь преграда, например днище тары (фиг. 1). Вследствие этого движущиеся части останавливаются и усилие в гибком тяговом органе 30 возрастает. Датчик, срабатывающий от величины усилия (не показан), соединяет поршневую полость А цилиндра 26 со сливом, а подштоковую полость б с линией нагнетания, шток 27 начинает двигаться вправо. При этом блоки 28 и 29, закреплен0 ные на штоке 27, перемещаются вправо, при этом блок 29 натягивает гибкий тяговый орган 33, а блок 28 ослабляет натяжение в гибком тяговом органе 30. Так как Т-образная каретка 5 заторможена, а подвижный конец гибкого тягового органа 33 закреплен
в нижней части стойки 13, при этом сам тяговый орган огибает 29 с правой стороны, то под воздействием тягового усилия на участке между блоком 10 и концом 34 стойка 13 начинает двигаться в направляюQ щих 7 вертикально ввер.х, перемешан с.чват манипулятора 15 (после укладки изделий в тару). При этом вертикально ввер.ч перемещается подвижный конец 31 гибкого тягового органа 30, выбирая его слабину. Стойка 13 перемещается вертикально вверх пока
ее выступ 14 не зафиксируется фиксатором 9, т. е. стойка 13 возвращается в первоначальное положение и ее вертикальное перемещение прекращается. По так как перемещение штока 27 под воздействием рабочего тела влево продолжается, то под воздействием
тянущего усилия в ветвях гибкого тягового органа 33 на участках, параллельных горизонтальной оси движения Т-образной каретки 5, заторможенная каретка 5 (тормоз все еще включен) начинает, преодолевая
5 сопротивление пружин 23, которыми подпружинены тормозные колодки 20, перемещаться вправо, перемещая колодки 20 в пазу 21 рычага 22. Как только величина перемещения тормозных колодок 20 вместе с кареткой 5 превысит величину а (а это происходит,
0 так как длина б паза 21 больше хода а концевика 18), микровыключатель 17 дает команду на отключение тормоза 1. Под воздействием тяги 25 колодки 20 отходят от горизонтальной части 3 Т-образной каретки 5 и она будет перемещаться вправо пока
упор 4 каретки 5 не войдет во взаимодействие с ограничительным упором 19, после чего каретка 5 останавливается, заняв исходное положение.
Таким образом, устройство обеспечивает надежное точное позиционирование захвата манипулятора при выполнении необходимой последовательности перемещений. Манипулятор, созданный на базе такого устройства, можно использовать как при загрузке изделий в тару, так и при выгрузке изделий из тары, при этом место выгрузки (или загрузки) определяется положением упора 16 устройства для перемещения захвата манипулятора с микровыключателем 17 и концевиком 18.
Использование предлагаемого устройства в манипуляторе позволяет значительно упростить конструкцию, уменьщить металлоемкость. Наличие гибких тяговых органов и
тормоза, схват которого выполнен с возможностью перемещения в пазу органа его подвески в тормозе, позволяет осуществить перемещение захвата манипулятора в двух
взаимно перпендикулярных направлениях, используя один привод, что позволяет снизить энергоемкость.
Использование манипулятора, созданного на базе такого устройства для загрузки и выгрузки изделий в тару, позволяет механизировать этот процесс на Кировоградском заводе сельскохозяйственных мащин «Красная звезда на 80-90%. Кроме этого, использование такого устройства в манипуляторах подобного рода позволяет сократить расход металла ориентировочно на 20-25%.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Растяжное устройство | 1989 |
|
SU1755088A1 |
| Монорельсовая транспортная система | 1984 |
|
SU1230892A1 |
| Устройство для перемещения и кантования грузов | 1987 |
|
SU1421676A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
| Толкатель вагонеток | 1982 |
|
SU1041851A1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| УСТРОЙСТВО ДЛЯ ОТМЕРА ДЛИН, РАСКРЯЖЕВКИ И СОРТИРОВКИ ЛЕСОМАТЕРИАЛОВ | 1993 |
|
RU2060874C1 |
| Устройство для чистки колен стояков коксовых печей | 1985 |
|
SU1375640A1 |
УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЗАХВАТА МАНИПУЛЯТОРА, содержащее корпус с горизонтальными направляющими, демпфирующий и ограничительный упоры, гидроцилиндр, соединенный кинематически с установленной в направляющих корпуса кареткой, имеющей на одном конце направляющие, размещенные перпендикулярно направляющим корпуса, и расположенную в направляющих каретки тягу с захватом и выступом на одном из концов, отличающееся тем, что, с целью снижения металлоемкости, оно снабжено фиксатором, размещенным на каретке с возможностью взаимодействия с выступом тяги, установленным в корпусе на подвеске между упорами тормозом для каретки и органом управления тормозом, расположенным на демпфирующем упоре, а кинематическая связь гидроцилиндра с кареткой включает в себя блоки, два из которых закреплены на щтоке гидроцилиндра, два других - на первом конце каретки по разные стороны от ее горизонтальной оси и один на втором конце каретки соосно с ее горизонтальной осью, и огибающие блоки два тяговых органа, неподвижные концы которых закреплены с S на корпусе, а подвижные - на соответствующих концах тяги. (Л со ел со со
ijn
I
21/.
П / i
Т1 / /////////////
16
Л18
17
а
19
Фиг.2
