Изобретение относится к устройствам для ремонта железнодорожного транспорта, в частности к устройствам для ремонта сваркой и наплавкой автосцепки подвижного состава.
Известен роботизированный манипулятор, содержащий консоль с рабочим органом, установленную на основании с возможностью ее поступательного и вращательного движения, систему позиционирования и систему управления манипулятором (патент RU №2243881 С2, МПК B25J 1/00, опубл. 01.10.2005) прототип.
Известный манипулятор содержит консоль (руку) с рабочим органом, установленную на основании с возможностью ее поступательного и вращательного движения, систему позиционирования и систему управления манипулятором. Рабочий орган выполнен в виде автоматического сцепного схвата, представляющего собой ответную головную часть корпуса железнодорожной автосцепки, дополнительно снабженного захватным механизмом с двумя захватными рычагами и приводом, шарнирно закрепленным в корпусе. Причем верхний двухплечевой рычаг шарнирно установлен на корпусе схвата и одним плечом кинематически связан с приводом, нижний одноплечевой рычаг шарнирно закреплен на корпусе привода и соединен тягой с первым, а также снабжен автоматическим пневмоклапаном, установленным в контуре зацепления корпуса схвата, блокирующим устройством привода захватного механизма. Устройство позиционирования выполнено с возможностью дискретного реверсивного вращения схвата в виде двух взаимоуравновешенных гидроцилиндров с пневмогидроаккумуляторами, штоки которых кинематически связаны через общую передачу с рукой, а их гидравлические полости соединены с пнемогидравлическими аккумуляторами привода вращения, управляемого пневматической системой, и центровки посредством привода, шарнирно установленного между тумбой и кареткой.
Недостатком известного решения является то, что оно не обеспечивает доступ ко всем ремонтируемым поверхностям и, следовательно, при его использовании нельзя обеспечить требуемое качество и надежность ремонтируемых изделий, в том числе автосцепки и тягового хомута.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение качества ремонта автосцепки, уменьшение трудоемкости при ремонте сваркой и наплавкой, а также в минимизации усилий на обеспечение ее вращения.
Указанный технический результат достигается тем, что в манипуляторе автосцепки, содержащем консоль с рабочим органом, установленную на основании с возможностью ее поступательного и вращательного движения, систему позиционирования и систему управления манипулятором, рабочий орган выполнен в виде механического зажима, обеспечивающего возможность захвата автосцепки за перемычку, соединяющую ребра корпуса автосцепки, основание манипулятора снабжено винтовыми опорами, причем манипулятор автосцепки дополнительно снабжен реверсивным приводом вертикального перемещения каретки, в которой размещен горизонтальный опорный вал консоли, содержащей снабженный противовесом полый корпус, на концах полого корпуса размещены втулки, оси которых расположены в одной плоскости перпендикулярно друг другу, причем в одной из втулок расположены подшипники для вращения корпуса консоли относительно вала каретки, а вторая втулка является подшипниковой опорой, выполненной с возможностью вращения рабочего органа относительно нее.
Манипулятор, характеризующийся тем, что система позиционирования содержит привод вертикального перемещения каретки, размещенные внутри корпуса консоли, привод вращения консоли относительно вала каретки и привод вращения рабочего органа относительно подшипниковой опоры рабочего органа, а система управления содержит механизм управления реверсивным приводом вертикального перемещения каретки, ручной привод вращения консоли и рабочего органа и механизм переключения вращения.
Манипулятор, характеризующийся тем, что зажим выполнен в виде внутренних и наружных пластин с вырезом для размещения перемычки, соединяющей ребра корпуса автосцепки, причем между внутренними пластинками расположен корпус, в котором размещен ползук, с установленным в нем коромыслом, концы которого соединены с пластинами.
Манипулятор, в котором привод вертикального перемещения каретки снабжен противовесом.
Манипулятор, в котором противовес и каретка закрыты решетчатым ограждением, которое опирается на основание стойки.
Сущность заявленного изобретения поясняется чертежами фиг.1-13.
На фиг.1 представлен общий вид манипулятора для автосцепки,
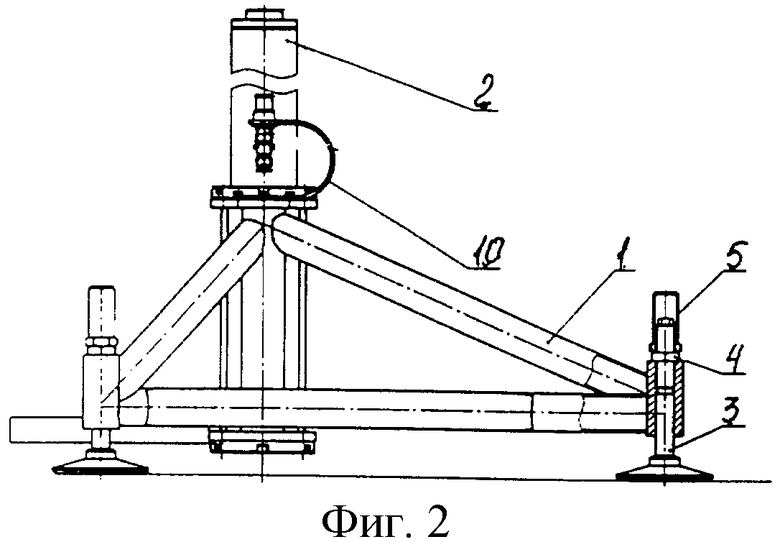
на фиг.2 - устройство стойки,
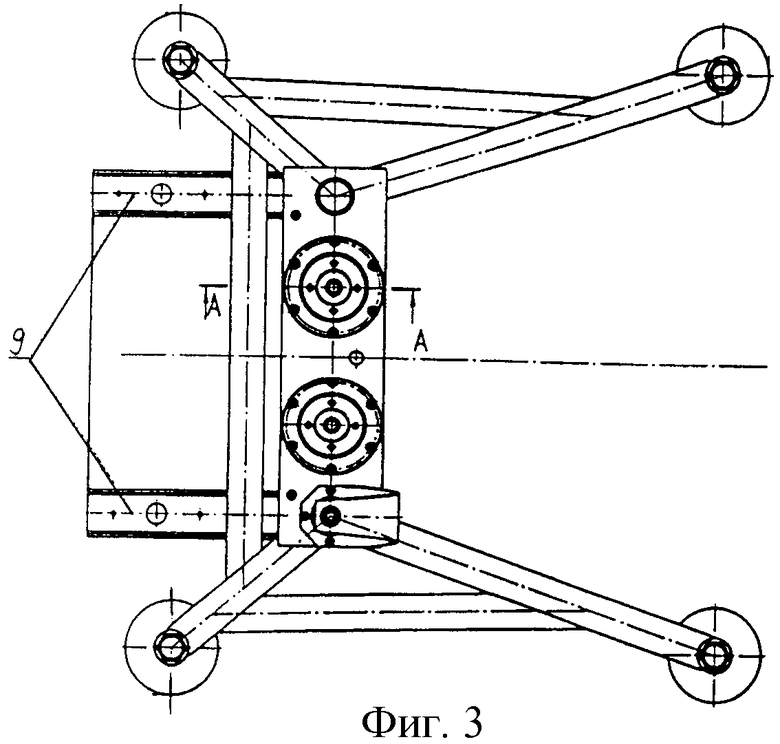
на фиг.3 - вид сверху на фиг.2,
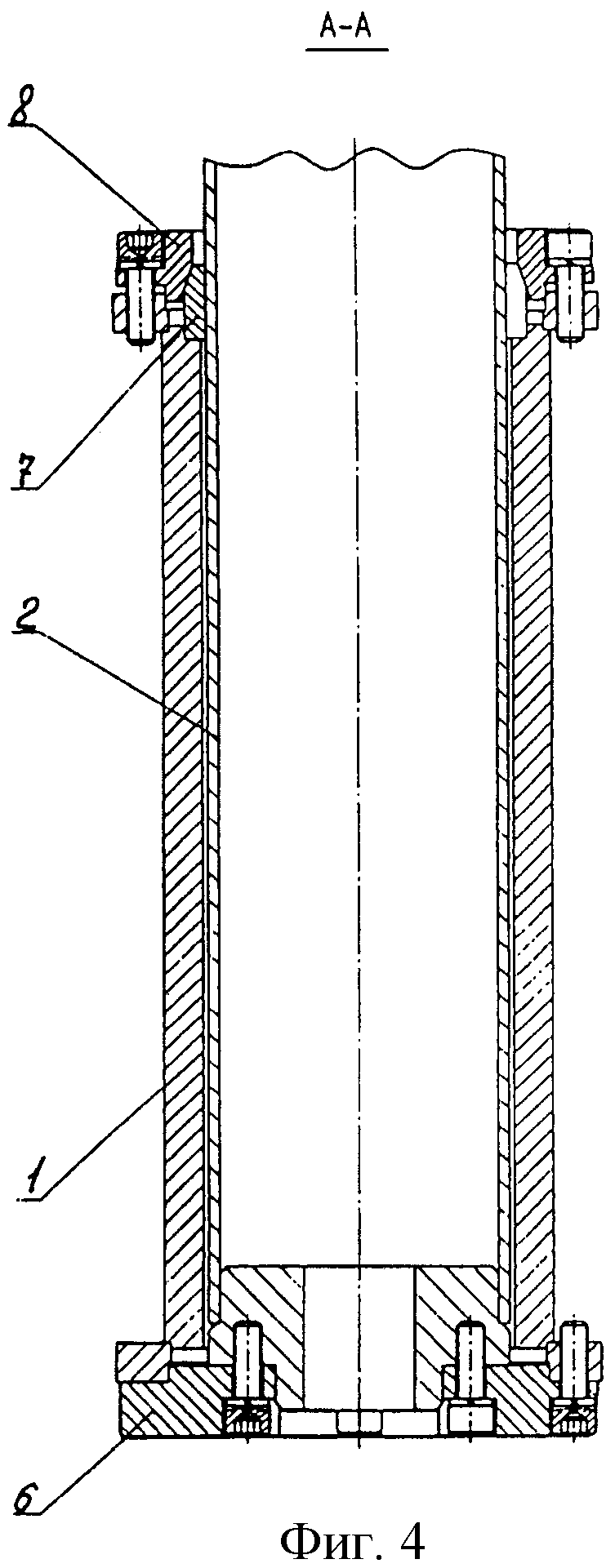
на фиг.4 - сечение А-А фиг.2,
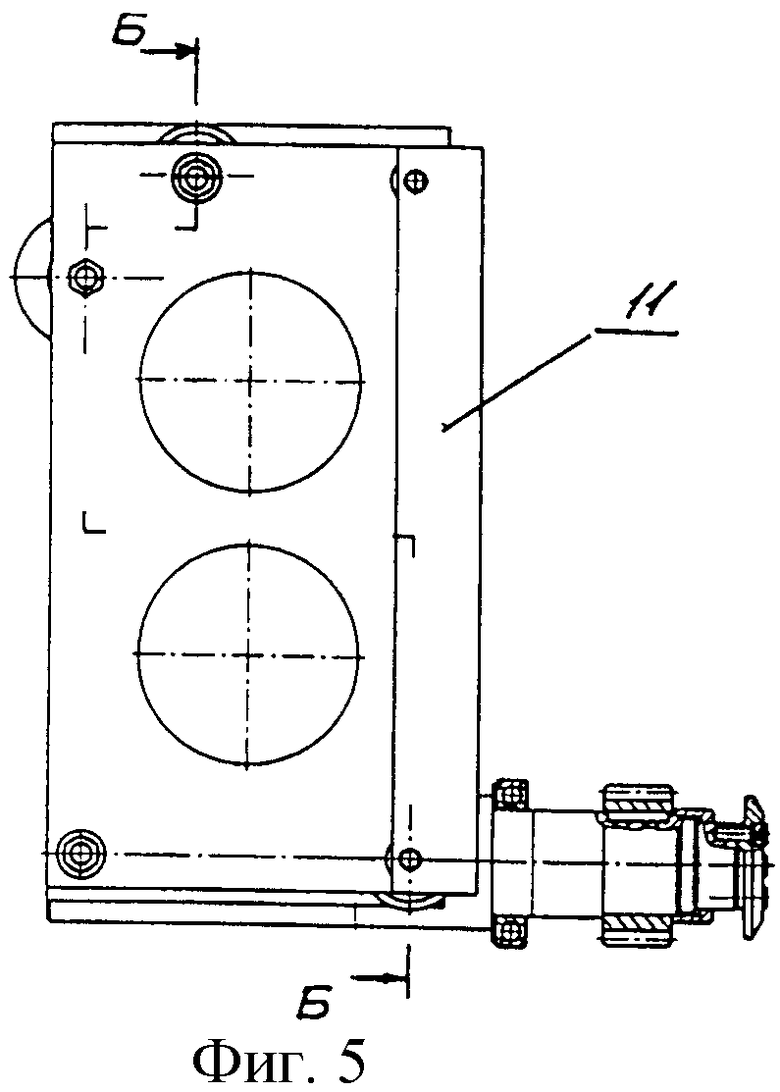
на фиг.5 - устройство каретки,
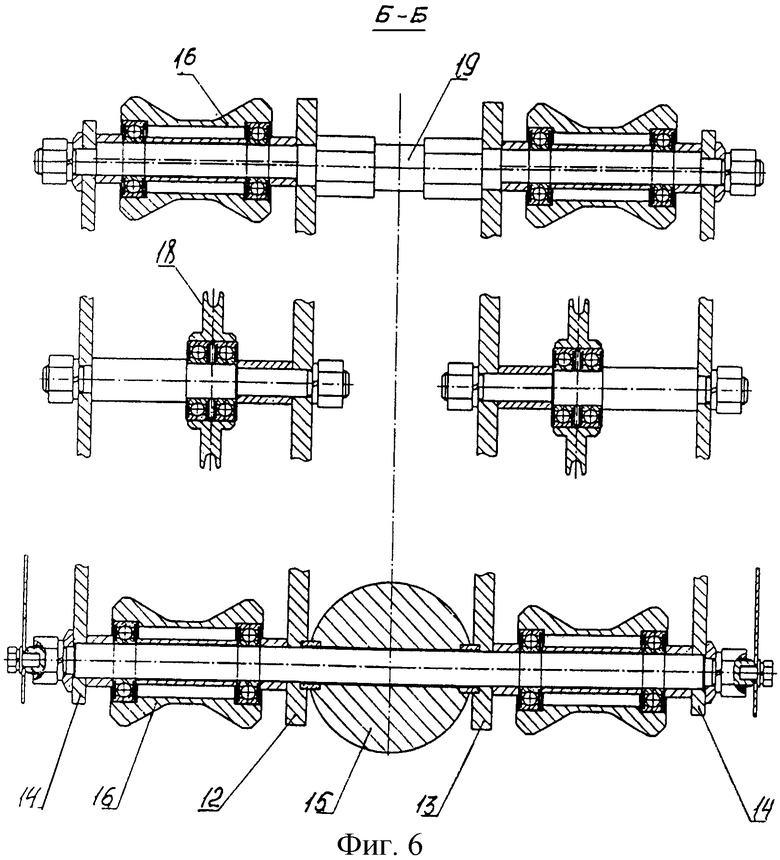
на фиг.6 - сечение Б-Б фиг.5,
на фиг.7 - устройство траверсы,
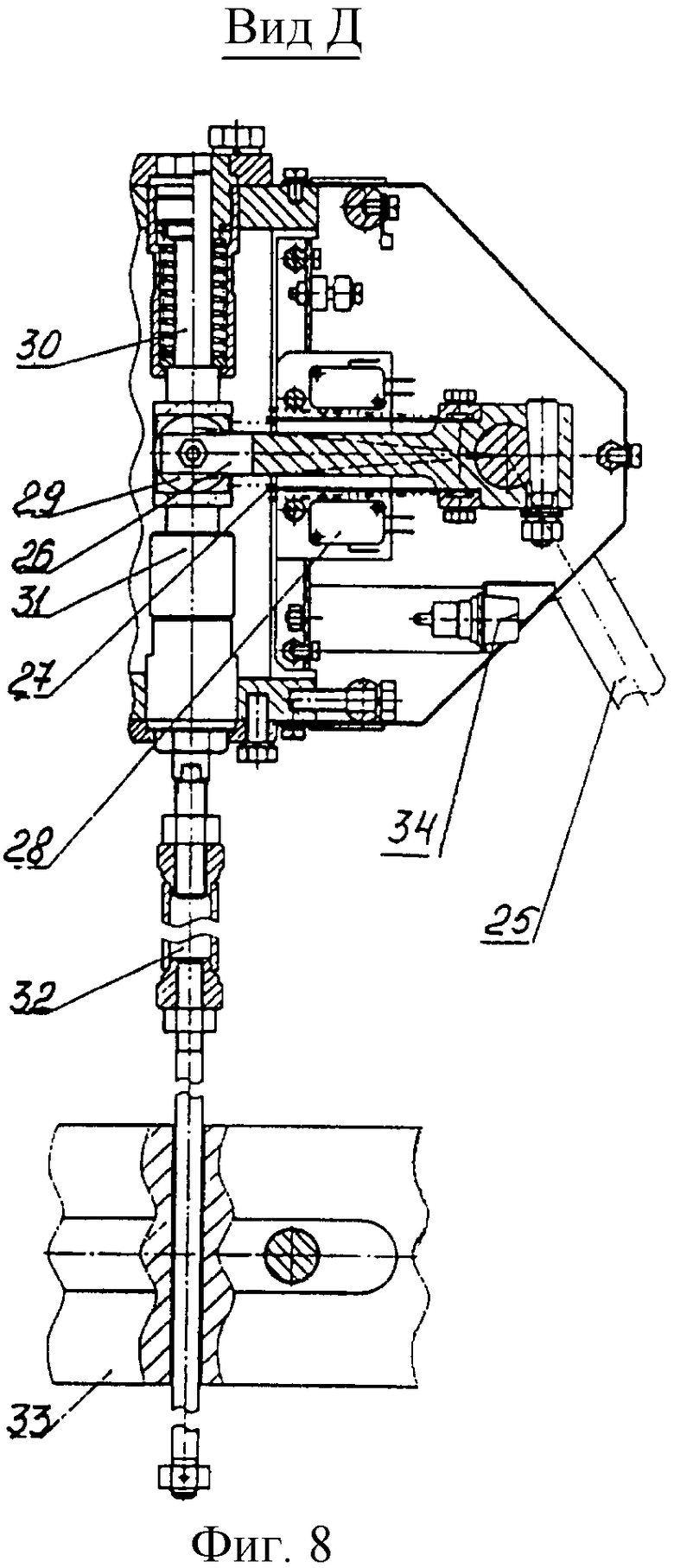
на фиг.8 - вид Д на фиг.7,
на фиг.9 - принципиальная схема консоли для автосцепки,
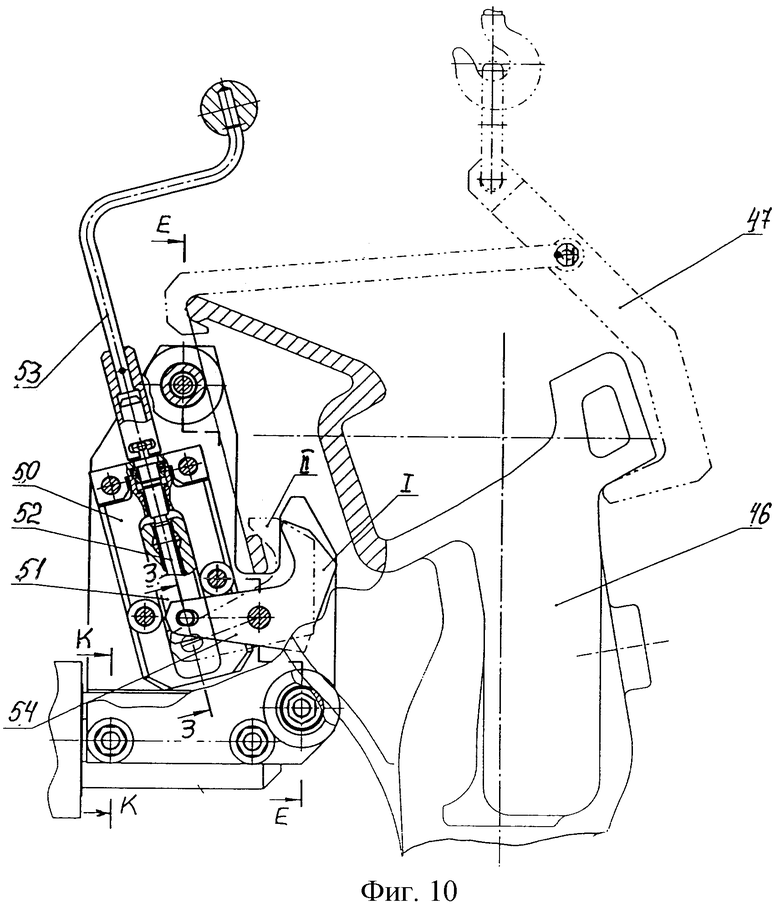
на фиг.10 - механизм зажима для автосцепки,
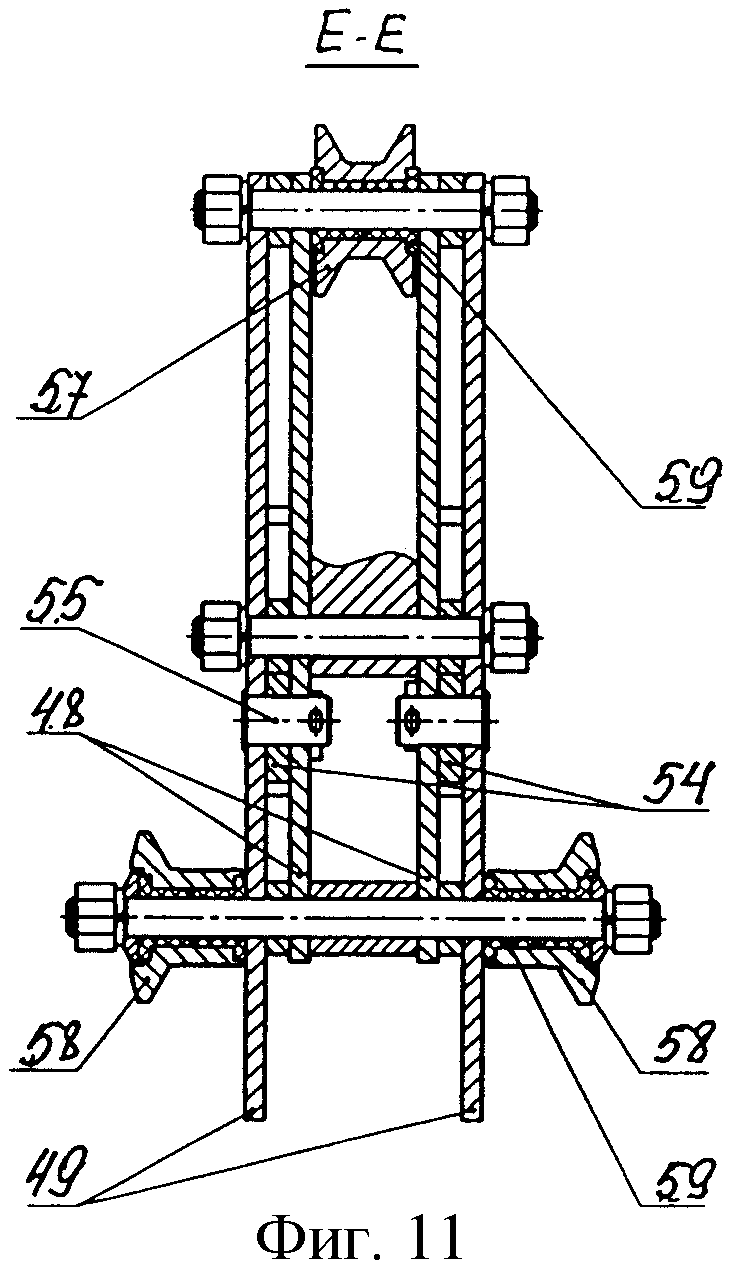
на фиг.11 - сечение Е-Е на фиг.10,
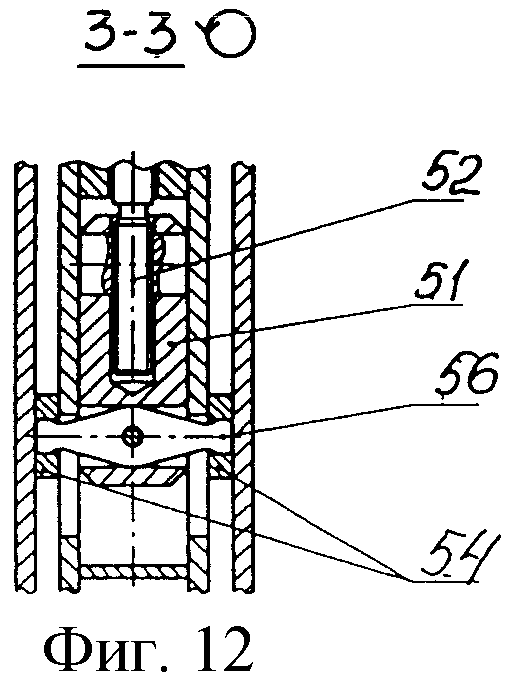
на фиг.12 - сечение З-З на фиг.10,
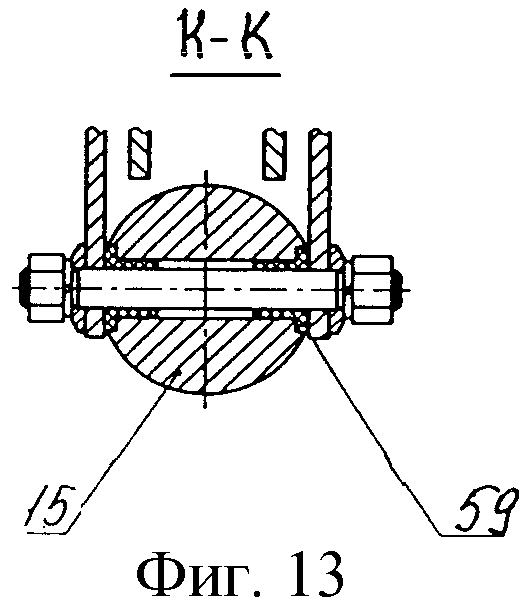
на фиг.13 - сечение К-К на фиг.10.
Описание устройства и работы манипулятора.
Указанные ниже конструктивные элементы манипулятора автосцепки в части, не характеризующей совокупность существенных признаков формулы заявляемого изобретения, раскрывают и описывают один из возможных вариантов исполнения манипулятора автосцепки в целом, но не ограничивают количество таких вариантов.
Основным несущим элементом конструкции манипулятора автосцепки является стойка, состоящая из сварного основания 1 и двух трубчатых стоек 2. Основание снабжено четырьмя винтовыми опорами 3, которые позволяют скомпенсировать неровности опорной поверхности и обеспечить вертикальность стоек. Винты опор стопорятся контргайками 4 и закрываются колпачками 5. Стойки своими нижними концами опираются на крышки 6, прикрепленные к основанию 1, и фиксируются разрезными сухарями 7 с крышками 8, что обеспечивает безлюфтовое крепление стоек к основанию. К основанию приварены кронштейны 9, используемые для крепления противовеса каретки при транспортировке манипулятора. На основании закреплен кронштейн 10 с разъемом, для подвода напряжения питания.
Каретка 11 состоит из пластин 12, 13 и 14. Между пластинами 12 и 13 закреплен вал 15, служащий опорой консоли. Между пластинами 12, 14 и 13, 14 установлены ролики 16, взаимодействующие с направляющими стойки 17, и блоки 18, служащие для подъема каретки. Ось 19 верхних роликов выполнена эксцентриковой, что позволяет регулировать вертикальное положение каретки. Ось 19 и валик, установленный между пластинами 12 и 13, используются для фиксации каретки при транспортировке манипулятора.
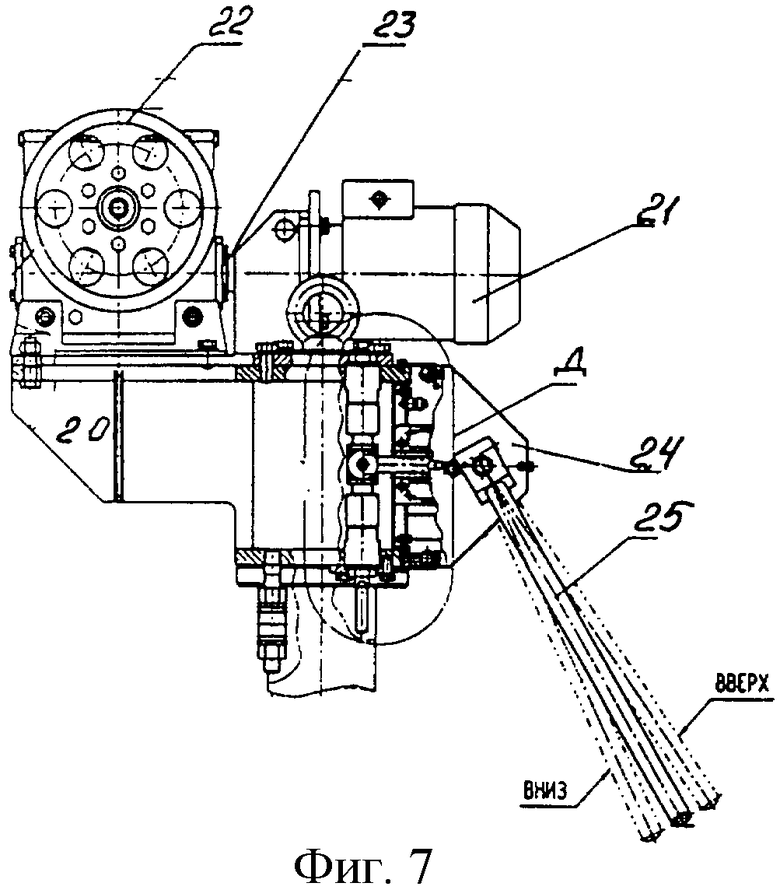
На стойках установлена сварная балка траверсы 20. На верхней плоскости балки смонтированы электродвигатель 21 с червячным редуктором 22, соединенные между собой дисково-кулачковой муфтой 23. На выходном валу редуктора 22 закреплены два тяговых ролика, обеспечивающих перемещение каретки. Крепление балки траверсы 20 к стойкам аналогично креплению стоек к основанию. Верхняя часть стоек соединена с балкой крышкой, зазор между стойкой и балкой выбирается сухарями и крышкой.
К балке траверсы прикреплен блок реверса 24, обеспечивающий управление электродвигателем 21. При повороте одной из рукояток 25 поворачивается соединенный с ними рычаг 26, который закрепленными на нем упругими пластинами 27 нажимает на кнопки микропереключателей 28, тем самым подавая напряжение на обмотки электродвигателя. Одновременно с этим кулачок 29 рычага перемещает шток 30 пружинного стабилизатора 31, соединенный с тягой 32. Тяга свободно проходит через отверстие вала каретки 33. При достижении кареткой крайнего положения ее вал воздействует на одну из гаек тяги, что приводит к перемещению штока стабилизатора и связанного с ним рычага блока реверса. Упругие пластины освобождают микропереключатели, электродвигатель останавливается, и перемещение каретки прекращается. В крайних положениях микропереключатели выполняют функцию путевых выключателей. Последующее включение привода возможно только в направлении, обратном от достигнутого крайнего положения. В блоке реверса установлены три индикатора 34, сигнализирующих о наличии напряжения на каждой из трех фаз кабеля питания. Нижняя пластина балки траверсы снабжена подвесами, используемыми для крепления каретки в транспортном положении (на фиг. не показаны).
Основные функции манипулятора автосцепки выполняет поворотная консоль. Сварной корпус 35 консоли выполнен из труб и имеет Г-образную форму. Корпус оканчивается втулками 36 и 37, оси которых взаимно перпендикулярны и расположены в одной плоскости. В одной из втулок 36 расположены подшипники, обеспечивающие вращение корпуса консоли относительно неподвижного вала каретки. Вторая втулка 37 служит подшипниковой опорой зажима автосцепки 38. Корпус консоли уравновешивается относительно вала каретки противовесом 39. Внутри полого корпуса консоли помещен механизм привода поворота консоли и зажима автосцепки.
Сочетание вращений относительно двух пересекающихся осей обеспечивает возможность придания автосцепке такого пространственного положения, при котором любая наплавляемая поверхность будет горизонтальна и обращена вверх. Вертикальное же перемещение каретки с консолью позволяет установить наплавляемую поверхность на удобной для сварщика высоте.
Привод поворота состоит из двух червячных механизмов 40 и 41, зацепляющихся с косозубыми шестернями, которые соединены с валом 41 зажима автосцепки и с валом каретки. При вращении одного червячного механизма зажим автосцепки поворачивается относительно оси О, а при вращении другого червячного механизма корпус консоли поворачивается относительно оси O1. Вращение червячным механизмом задается валом 42, для поворота которого используется ключ 43, входящий в комплект поставки консоли. Вал 42 может соединяться с одним из червячных механизмов посредством шариковой муфты, либо через шарнирный вал 44 с другим червячным механизмом. Выбор варианта соединения осуществляется осевым перемещением вала 42. При вытягивании из корпуса консоли вал 42 соединяется с червячным механизмом зажима. При вталкивании в корпус вал 42 соединяется с червячным механизмом каретки. Фиксация выбранного положения вала 42 обеспечивается шарико-роликовым фиксатором 45. Осевое перемещение вала 42 обеспечивается ключом 43, имеющим специальные вырезы, зацепляющиеся со штифтом вала 42. Крепление корпуса автосцепки к манипулятору обеспечивается зажимом, который крепится к валу консоли. Корпус автосцепки 46 устанавливается в зажим грузоподъемным устройством в вертикальном положении хвостовиком вниз с помощью специального захвата 47. Две пары пластин зажима 48 и 49 имеют вырез, в который заводится перемычка, соединяющая ребра корпуса автосцепки.
Между внутренними пластинами 48 закреплен корпус 50, в пазу которого перемещается ползун 51. Перемещение ползуна осуществляется винтом 52, который вращается ключом 53. Для этой цели может использоваться тот же ключ, которым приводится в действие привод консоли. В зазоре между внутренними 48 и внешними 49 пластинами находятся рычаги 54, вращающиеся относительно осей 55. Перемещение ползуна передается рычагам посредством балансира 56, обеспечивающего одинаковую нагрузку на рычаги при их различном перемещении, вызванном погрешностями литья. При вращении винта 52, имеющего левую резьбу, по часовой стрелке ползун 51 перемещается вниз и поворачивает рычаги 54 из положения I в положение II. Свободные концы рычагов, воздействуя на перемычку корпуса автосцепки, плотно прижимают ребра корпуса к упорам 57 и 58. В результате корпус автосцепки оказывается зафиксированным в зажиме, причем все поверхности, подлежащие наплавке, остаются свободными. После затяжки винта 52 ключ 53 с него снимается и используется для управления консолью. Для предотвращения повреждения механизмов манипулятора сварочным током упоры 57 и 58 установлены на изолирующих втулках 59. Такие же втулки используются в местах крепления зажима к валу консоли.
Противовес 60 и каретка 11 могут быть закрыты решетчатым ограждением, которое может опираться на основание стойки 1 и удерживаться от сдвига крепежными элементами.
Как следует из вышеизложенного, технический результат достигается, в том числе и за счет за счет того, что крепление корпуса автосцепки осуществляется за ребра, которые не подлежат обработке, таким образом, все ремонтируемые поверхности остаются свободными; корпус автосцепки имеет возможность вращения относительно двух взаимно перпендикулярных осей, что обеспечивает удобство доступа ко всем ремонтируемым поверхностям и соответственно повышает качество ремонта.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНО-КАРУСЕЛЬНЫЙ СТЕНД | 2008 |
|
RU2385813C1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Устройство для закрепленияРЕНТгЕНОВСКОгО АппАРАТА | 1978 |
|
SU814631A1 |
| ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ ИЗДЕЛИЙ ИЗ РАСПЛАВЛЕННОГО СТЕКЛА | 1990 |
|
RU2031862C1 |
| Привод подачи фрезерного станка для обработки вафельной конструкции обечайки | 2024 |
|
RU2824782C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ И ОРИЕНТИРОВАННОЙ УСТАНОВКИ ЕМКОСТЕЙ И ЕМКОСТЬ ДЛЯ ПЕРЕМЕЩЕНИЯ И ХРАНЕНИЯ | 2008 |
|
RU2379175C2 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| Модульное устройство для перефутеровки барабанных мельниц | 2017 |
|
RU2665938C1 |
| РОБОТ, ВЫПОЛНЕННЫЙ С ИСПОЛЬЗОВАНИЕМ ПРИНЦИПА ПАРАЛЛЕЛОГРАММА | 2016 |
|
RU2663510C2 |
| Устройство управления манипуляторами роботохирургического комплекса | 2020 |
|
RU2757969C1 |

Изобретение относится к устройствам для ремонта железнодорожного транспорта, в частности к устройствам для ремонта сваркой и наплавкой автосцепки подвижного состава. Манипулятор содержит консоль с рабочим органом, установленную на основании с возможностью ее поступательного и вращательного движения, систему позиционирования и систему управления манипулятором. Рабочий орган выполнен в виде механического зажима, обеспечивающего возможность захвата автосцепки за перемычку, соединяющую ребра корпуса автосцепки. Манипулятор снабжен винтовыми опорами и реверсивным приводом вертикального перемещения каретки, в которой размещен горизонтальный опорный вал консоли, содержащей снабженный противовесом полый корпус. На концах полого корпуса размещены втулки, оси которых расположены в одной плоскости перпендикулярно друг другу. В одной из втулок расположены подшипники для вращения корпуса консоли относительно вала каретки, а вторая втулка является подшипниковой опорой, выполненной с возможностью вращения рабочего органа относительно нее. Техническим результатом является повышение качества ремонта автосцепки, уменьшение трудоемкости при ремонте сваркой и наплавкой, а также минимизация усилий на обеспечение вращения. 4 з.п. ф-лы, 13 ил.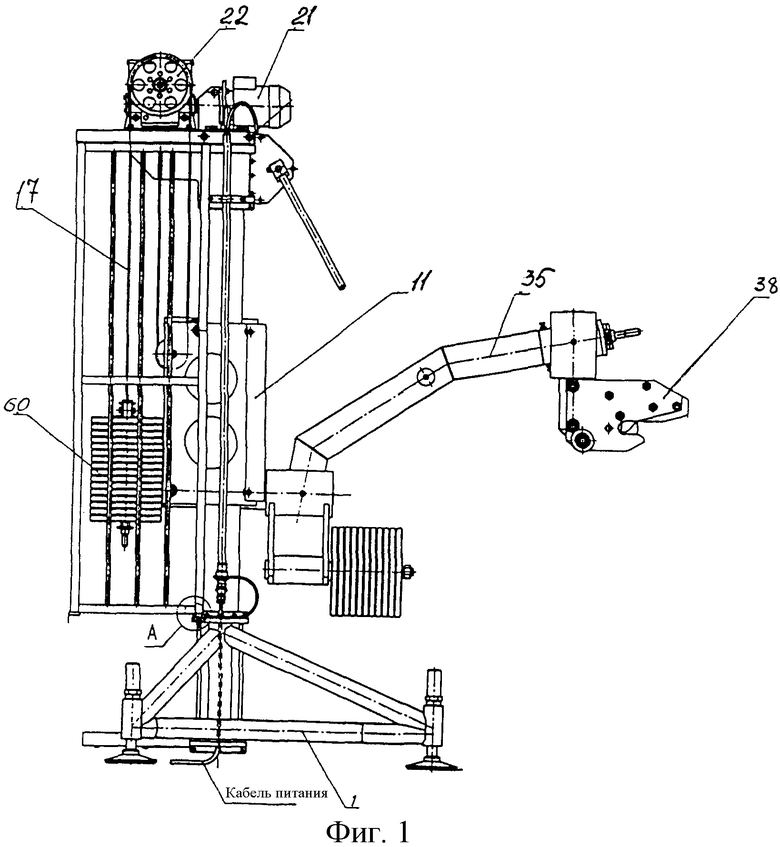
1. Манипулятор автосцепки, содержащий консоль с рабочим органом, установленную на основании с возможностью ее поступательного и вращательного движения, систему позиционирования и систему управления манипулятором, отличающийся тем, что рабочий орган представляет собой механический зажим, выполненный с возможностью захвата автосцепки за перемычку, соединяющую ребра корпуса автосцепки, основание манипулятора снабжено винтовыми опорами, а сам манипулятор - реверсивным приводом вертикального перемещения каретки, в которой размещен горизонтальный опорный вал консоли, содержащей снабженный противовесом полый корпус, на концах которого размещены втулки, оси которых расположены в одной плоскости перпендикулярно друг другу, причем в одной из втулок расположены подшипники для вращения корпуса консоли относительно вала каретки, а вторая втулка является подшипниковой опорой, выполненной с возможностью вращения рабочего органа относительно нее.
2. Манипулятор по п.1, отличающийся тем, что система позиционирования содержит привод вертикального перемещения каретки, размещенные внутри корпуса консоли привод вращения консоли относительно вала каретки и привод вращения рабочего органа относительно подшипниковой опоры рабочего органа.
3. Манипулятор по п.1, отличающийся тем, что система управления содержит механизм управления реверсивным приводом вертикального перемещения каретки, ручной привод вращения консоли и рабочего органа и механизм переключения вращения.
4. Манипулятор по п.1, отличающийся тем, что зажим выполнен в виде внутренних и наружных пластин с вырезом для размещения перемычки, соединяющей ребра корпуса автосцепки, причем между внутренними пластинами расположен корпус, в котором размещен ползун с установленным в нем коромыслом, концы которого соединены с пластинами.
5. Манипулятор по п.1, отличающийся тем, что привод вертикального перемещения каретки снабжен противовесом.
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| МАНИПУЛЯТОР ДЛЯ ИНДУКЦИОННОЙ НАПЛАВКИ | 1996 |
|
RU2101152C1 |
| Сборные колонны из пустотелых керамических камней | 1949 |
|
SU88321A1 |
| СПОСОБ НАНЕСЕНИЯ ПОКРЫТИЯ НА ПОВЕРХНОСТЬ ОСНОВЫ (ВАРИАНТЫ) И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2125620C1 |

