в
00
СХ) SI
2. Гидромеханический акселерометр, содержащий инерционный чувствительный элемент, соединенный с валом подъемной машины и золотником гидравлического преобразователя перемещений, выполненного в виде подпружиненного двухлинейного трекпозиционного гидрораспределителя непрерывного действия и соединенного через нерегулируемый дроссель с источником питания, отличающийся тем, что, с целью увеличения срока службы гидрораспределителя, чувствительный элемент выполнен в виде дифференциального механизма, состоящего из ползуна, на котором размещены два ролика, неподвижного основания с четырьмя закрепленными на нем идентичными роликами и замкнутого гибкого звена, охватывающего все ролики, при этом с валом подъемной мешшны связан один из четырех роликов, закрепленных на основании, а ползун жестко соединен с золотником гидрораспределителя.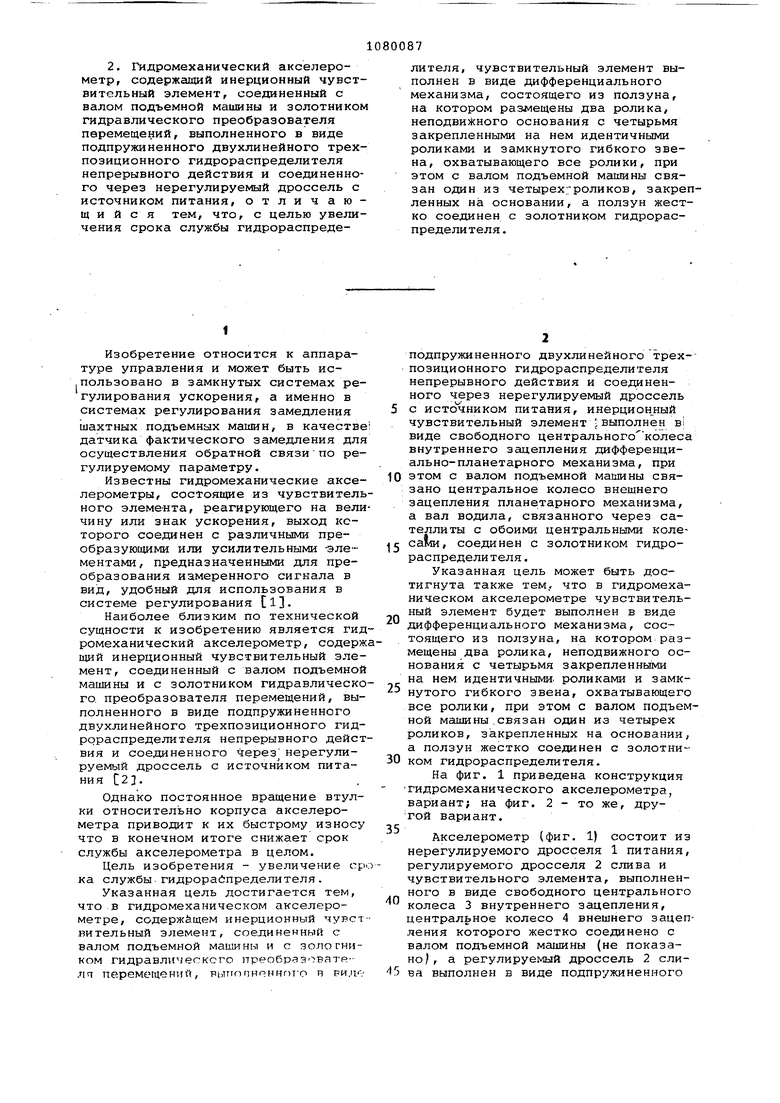
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидромеханический акселерометр,преимущественно для измерения замедления шахтных подъемных машин | 1979 |
|
SU888044A1 |
| Система управления тормозом шахтной подъемной машины | 1983 |
|
SU1180350A2 |
| ГИДРОМЕХАНИЧЕСКАЯ МУФТА | 2012 |
|
RU2536035C2 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU948869A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| Устройство управления тормозом шахтной подъемной машины | 1986 |
|
SU1404450A1 |
| Устройство управления грузоподъемным краном | 1980 |
|
SU965966A1 |
| Система приводов трактора | 1983 |
|
SU1131686A1 |
| Система управления тормозом шахтной подъемной машины | 1985 |
|
SU1306898A2 |
| Гидромеханический ходоуменьшитель землеройной машины | 1983 |
|
SU1089214A1 |
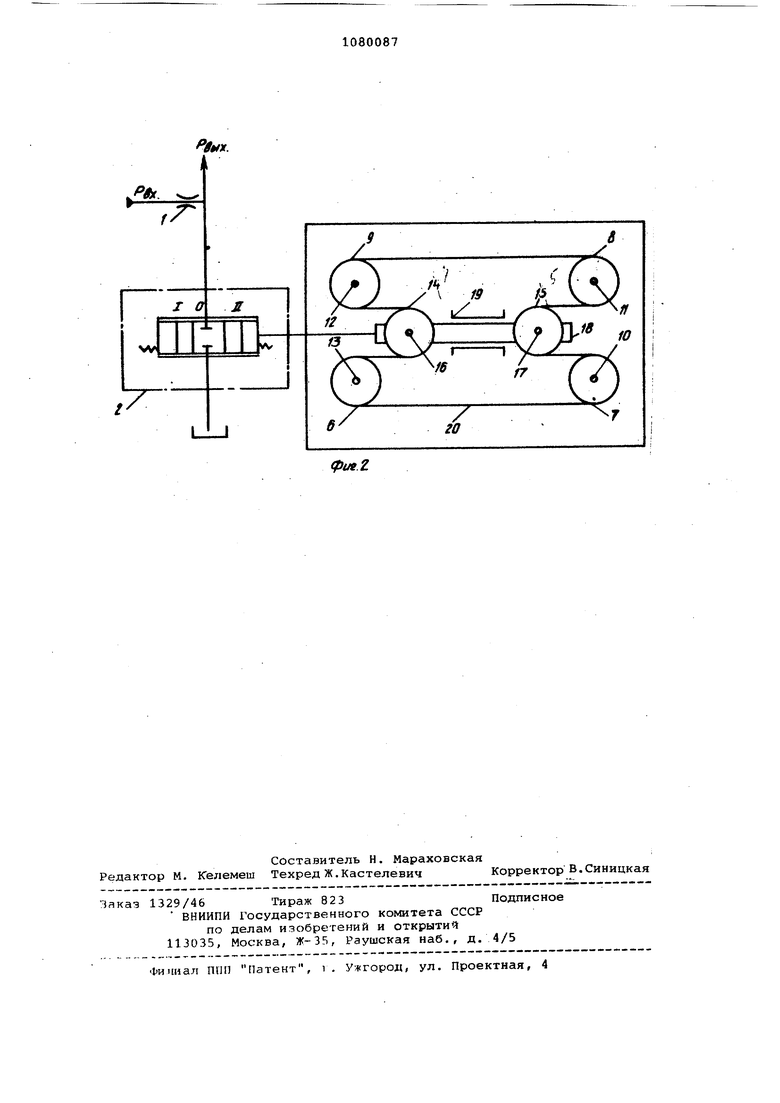
1. Гидромеханический акселерометр, содержащий инерционный чувствительный элемент, соединенный с валом подъемной машины и с золотником гидравлического преобразователя перемещений, выполненного в виде подпружиненного двухлинейного трехпозиционного гидрораспределителя непрерывного действия и соединенного через нерегулируемый дроссель с источником питания, отличающийся., тем, что, с целью увеличения срока службы гидрораспределителя, чувствительный инерционный элемент выполнен в виде свободного центрального колеса внутреннего зацепления дифференциально-планетарного механизма, при этом с валом подъемной машины связано центрсшьное колесо внешнего зацепления планетарного § механизма, а вал водила, связанного через сателлиты с обоими цент(П ральными колесами, соединен с золотником гидрораспределителя.
1
Изобретение относится к аппаратуре управления и может быть ис.пользовано в замкнутых системах регулирования ускорения, а именно в системах регулирования замедления шахтных подъемных машин, в качестве датчика фактического замедления для осуществления обратной связи по регулируемому параметру.
Известны гидромеханические акселерометры, состоящие из чувствительного элемента, реагирующего на величину или знак ускорения, выход которого соединен с различными преобразующими или усилительными -элементами, предназначенными для преобразования измеренного сигнала в вид, удобный для использования в системе регулирования 1.
Наиболее близким по технической сущности к изобретению является гидромеханический акселерометр, содержщий инерционный чувствительный элемент, соединенный с валом подъемной машины и с золотником гидравлического, преобразователя перемещений, выполненного в виде подпружиненного двухлинейного трехпозиционного гидрораспределителя непрерывного действия и соединенного через нерегулируемьтй дроссель с источником питания 23.
Однако постоянное вращение втулки относительно корпуса акселерометра приводит к их быстрому износу что в конечном итоге снижает срок службы акселерометра в целом.
Цель изобретения - увеличение срка службы гидрорайпределителя.
Указанная цель достигается тем, что в гидромеханическом акселерометре, содерж&щем инерционный чувствительный элемент, соединенный с валом подъемной машины и с золотником гидравлнгесксго преобразоватклп перемещений, рытюпнпингио н Рил-.
подпружиненного двухлинейного трех-позиционного гидрораспределителя непрерывного действия и соединенного через нерегулируемый дроссель с источником питания, инерционный чувствительный элемент выполнен в| виде свободного центрального колеса внутреннего зацепления дифференциально-планетарного механизма, при этом с валом подъемной машины связано центральное колесо внешнего зацепления планетарного механизма, а вал водила, связанного через сателлиты с обоими центральными колесами, соединен с золотником гидрораспределителя .
Указанная цель может быть достигнута также тем, что в гидромеханическом акселерометре чувствительный элемент будет выполнен в виде дифференциального механизма, состоящего из ползуна, на котором размещены два ролика, неподвижного основания с четырьмя закрепленными на нем идентичными, роликами и замкнутого гибкого звена, охватывающего все ролики, при этом с валом подъемной машины .связан один из четырех роликов, закрепленных на ocнoвai ии, а ползун жестко соединен с золотником гидрораспределителя.
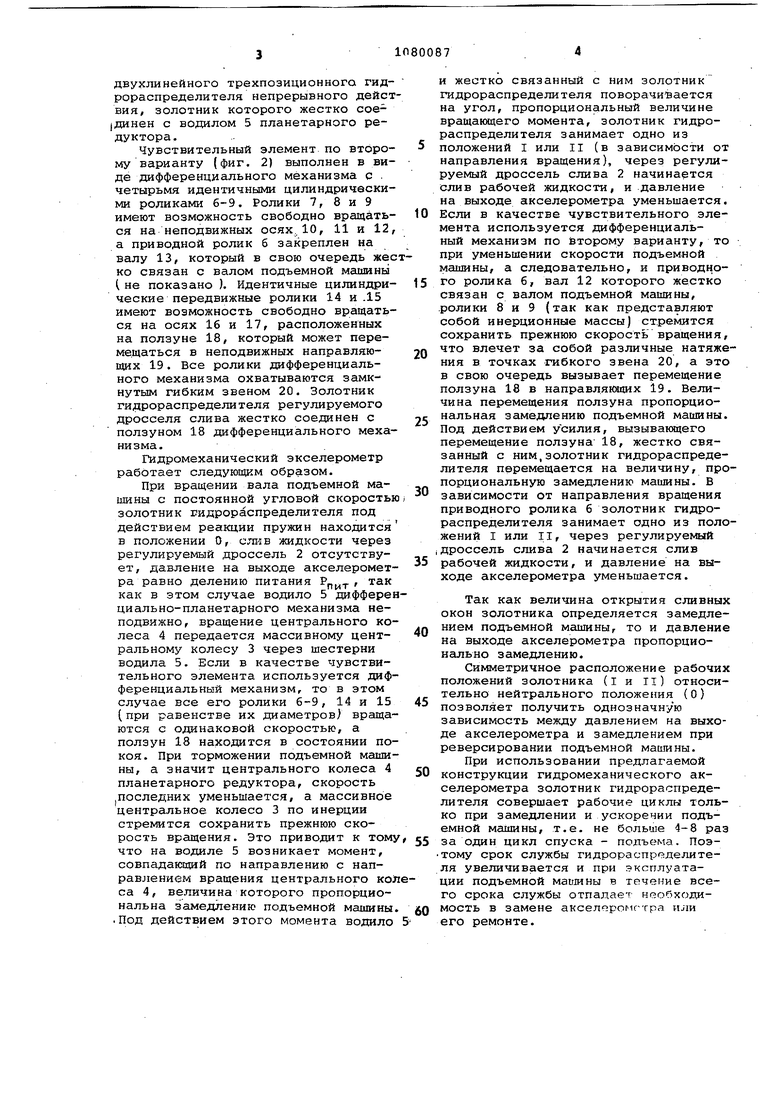
На фиг. 1 приведена конструкция Гидромеханического акселерометра, вариант; на фиг. 2 - то же, другой вариант.
Акселерометр (фиг. 1) состоит из нерегулируемого дросселя 1 питания, регулируемого дросселя 2 слива и чувствительного элемента, выполненного в виде свободного центрального колеса 3 внутреннего зацепления, центральное колесо 4 внешнего зацепления которого жестко соединено с валом подъемной машины (не показано), а регулируемый дроссель 2 слива выполнен в виде подпружиненного
двухлинейного трехпозиционнога гидрораспределителя непрерывного действия, золотник которого жестко сое)динен с водилом 5 планетарного редуктора.
Чувствительный элемент по второму варианту (фиг. 2) выполнен в виде дифференциального механизма с . четырьмя идентичными цилиндрическими ролика 6-9. Ролики 7, 8 и 9 имеют возможность свободно вращаться на неподвижных осях.10, 11 и 12, а приводной ролик б закреплен на валу 13, который в свою очередь жеско связан с валом подъемной машиньа (не показано ). Идентичные цилиндрические передвижные ролики 14 и .15 имеют возможность свободно вращаться на осях 16 и 17, расположенных на ползуне 18, который может перемещаться в неподвижных направляющих 19. Все ролики дифференциального механизма охватываются замкнутым гибким звеном 20. Золотник гидрораспределителя регулируемого дросселя слива жестко соединен с ползуном 18 дифференциального механизма.
Гидромеханический экселерометр работает следующим образом.
При вращении вала подъемной машины с постоянной угловой скоростью золотник Еидрораспределителя под действием реакции пружин находится в положении О, слкв жидкости через регулируемый дроссель 2 отсутствует, давление на выходе акселерометра равно делению питания как в этом случае водило 5 дифференциально-планетарного механизма неподвижно, вращение центрального колеса 4 передается массивному центральному колесу 3 через шестерни водила 5. Если в качестве чувствительного элемента используется дифференциальный механизм, то в этом случае все его ролики 6-9, 14 и 15 (при равенстве их диаметров) вращаются с одинаковой скоростью, а ползун 18 находится в состоянии покоя. При торможении подъемной машины, а значит центрального колеса 4 планетарного редуктора, скорость |Последних уменьшается, а массивное центральное колесо 3 по инерции стремится сохранить прежнюю скорость вращения. Это приводит к тому что на водиле 5 возникает момент, совпадающий по направлению с направлением вращения центрального колса 4, величина которого пропорциональна замедлению подъемной машины .Под действием этого момента водило
и жестко связанный с ним золотник гидрораспределителя поворачивается на угол, пропорциональный величине вращающего момента, золотник гидрораспределителя занимает одно из положений I или II (в зависимости от направления вращения}, через регулируемый дроссель слива 2 начинается слив рабочей жидкости, и давление на выходе акселерометра уменьшается. Если в качестве чувствительного элемента используется дифференциальный механизм по второму варианту, то при уменьшении скорости подъемной машины, а следовательно, и приводного ролика б, вал 12 которого жестко связан с валом подъемной машины, .ролики 8 и 9 (так как представляют собой инерционные массы) стремится сохранить прежнюю скорость вращения, что влечет за собой различные натяжения в точках гибкого звена 20, а это в свою очередь вызывает перемещение ползуна 18 в направляющих 19. Величина перемещения ползуна пропорциональная замедлению подъемной машины. Под действием усилия, вызывающего перемещение ползуна 18, жестко связанный с ним,золотник гидрораспределителя перемещается на величину, пропорциональную замедлению машины. Б зависимости от направления вращения приводного ролика б золотник гидрораспределителя занимает одно из положений I или II, через регулируемый iдроссель слива 2 начинается слив рабочей жидкости, и давление на выходе акселерометра уменьшается.
Так как величина открытия сливных окон золотника определяется замедлением подъемной машины, то и давление на выходе акселерометра пропорционально замедлению.
Симметричное расположение рабочих положений золотника (I и 11) относительно нейтрального положения (0) позволяет получить однозначную зависимость между давлением на выходе акселерометра и замедлением при реверсировании подъемной машины.
При использовании предлагаемой конструкции гидромеханического акселерометра золотник гидрораспределителя совершает рабочие циклы только при замедлении и ускорении подъемной машины, т.е. не больше 4-8 раз за один цикл спуска - подъема. Поэтому срок службы гидрораспределителя увеличивается и при эксплуатации подъемной маимны в течение всего срока службы отпадает необходимость в замене акселгэромс-тра или его ремонте.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Грановский Б.С | |||
| и др | |||
| Шахтные подъемные установки за рубежом | |||
| ЦНИЭИуголь, М., 1972, с | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гидромеханический акселерометр,преимущественно для измерения замедления шахтных подъемных машин | 1979 |
|
SU888044A1 |
