Механизм предназначен для открывания затворов рампы коксовых печей при выдаче кокса с рампы на транспортер.
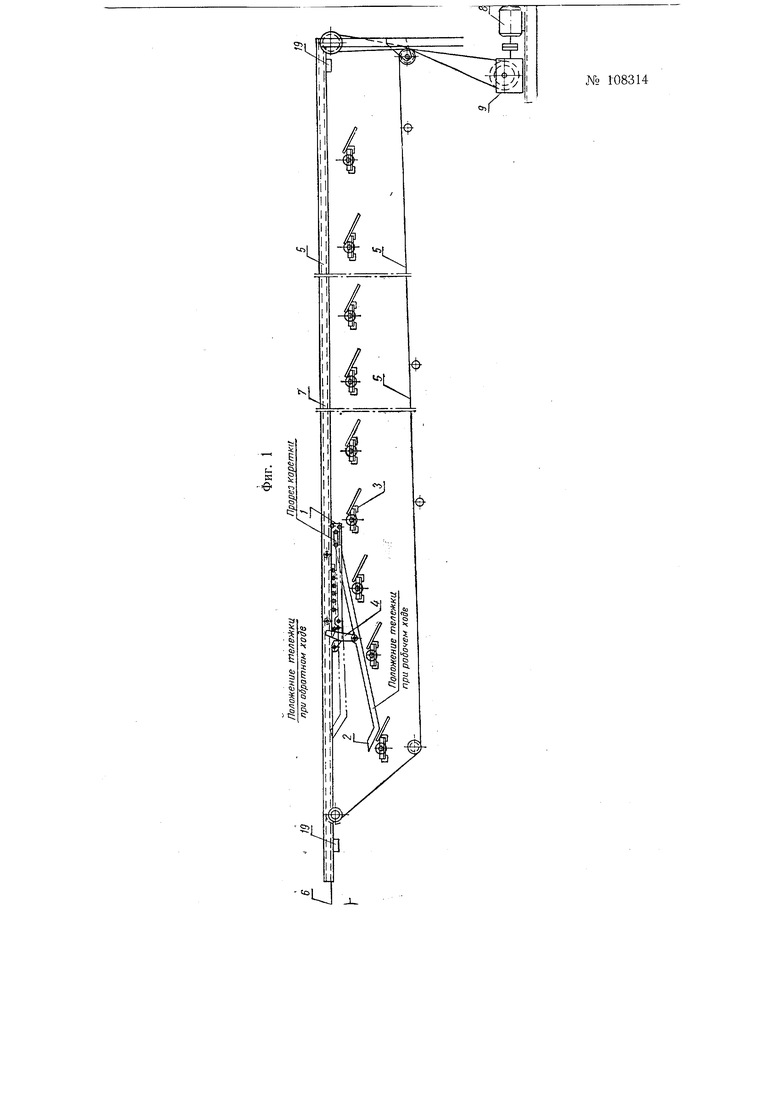
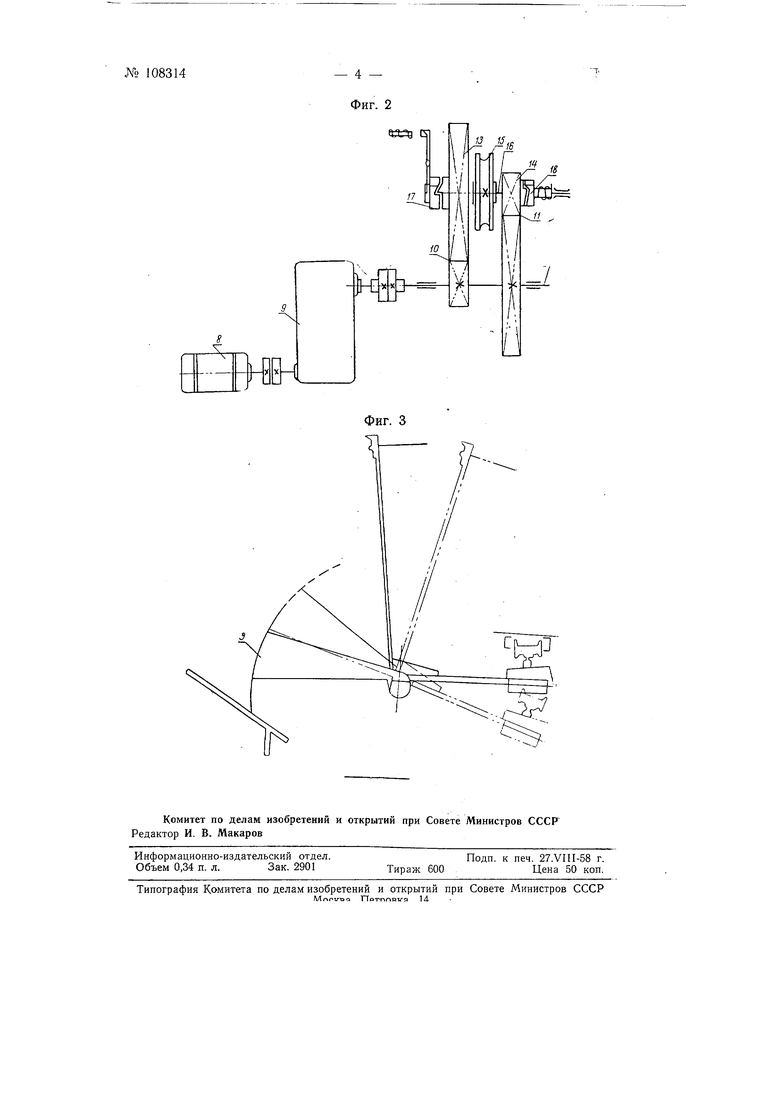
Механизм для управления затворами рампы выгодно отличается от ранее известных тем, что он при своей конструктивной простоте имеет малые габариты, работает автоматически и обеспечивает равномерную выдачу кокса с рампы на транспортер, а также улучшает санитарные условия трудаНа фиг. 1 изображена кинематическая схема автоматического управления затворами рампы; на фиг. 2- кинематическая схема привода тележки; на фиг. 3-положение затвора рампы в различные моменты рабочего хода тележки.
Механизм для автоматического управления затворами состоит из следующих основных узлов: каретки 1 с рычагом-толкателем 2 для открывания затворов 3, шарнирного рычага обратного хода 4, проволочного каната 5 привода каретки и каната 6 с натяжным грузом 7.
Привод каретки осуш,ествляется с
помош,ью электродвигателя 8 через редуктор 9 и реверсивную передачу. Реверсивная передача состоит из двух цилиндрических шестерен 10 и
11,закрепленных на ведомом валу
12,двух цилиндрических шестерен 13 W. 14 и канатного шкива 15, закрепленных на ведомом валу 16.
Прямой (рабочий) ход и обратный ход каретки осушествляется путем автоматического включения или выключения муфт сцепления 17 и 18 с помош,ью концевых выключателей, расположенных на концах направляющих балок 19.
Паправляющая балка для каретки монтируется вдоль рампы коксовой печи, между потолком рабочей площадки и хвостовиками затворов.
Работа механизма производится следующим образом.
Привод при помощи бесконечного каната 5 через распорный рычаг 4 приводит в возвратно-поступательное движение каретку и соединенный с нею шарнирно рычаг-толкатель.
При рабочем движении каретки по направляющим балкам рычагтолкатель нажимает на ролики у хвостовиков затворов .и последовательно открывает все затворы рампы.
Рычаг-толкатель одновременно может находиться в рабочем состоянии с тремя затворами, оставляя их открытыми в трех различных положениях в каждый данный момент.
При обратном холостом движении каретки вдоль рампы рычаг-толкатель с помощью троса, прикрепленного к рычагу обратного хода, свободно катится по роликам затворов до своего крайнего первоначального положения. При этом движении затворы остаются закрытыми.
Предмет изобретения
Механизм открывания затворов рампы KOKCOiBbix печей, состоящий из привода и движущейся тележки, отличающийся тем, что, с целью обеспечения равномерной и автоматической выдачи кокса с рамп на транспортер путем последовательного открытия затворов, механизм снабжен рычагом-толкателем, связанным при помощи подвижного щарнира с тележкой и с канатом при помощи распорного рычага, обеспечивающего при рабочем ходе отклонение рычага-толкателя на заданное положение, а при холостом ходе - прижатие рьшагатолкателя к тележке.
-еt;
№ Ш8314
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая коксовая рампа | 1955 |
|
SU104580A1 |
| Тушильный вагон | 1989 |
|
SU1765157A1 |
| Тушильный вагон | 1990 |
|
SU1730121A1 |
| Контактное устройство для питания высокоскоростных тележек крановых механизмов | 1941 |
|
SU63318A1 |
| Коксотушильный вагон | 1989 |
|
SU1663007A1 |
| УСТАНОВКА ДЛЯ ОБСЛУЖИВАНИЯ КОКСОВЫХ ПЕЧЕЙ | 1973 |
|
SU382669A1 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПУТЕЙ КОКСОТУШИЛБНОГОВАГОНА | 1971 |
|
SU420721A1 |
| Установка для приема кокса из коксовых печей | 1990 |
|
SU1701725A1 |
| Непрерывно действующая горизонтальная коксовальная печь | 1936 |
|
SU48149A1 |
| КОНТРОЛЛЕР СТАЦИОНАРНОЙ НЕ ПОДВЕРЖЕННОЙ РАСШИРЕНИЯМ ДВЕРИ ПЕЧИ ДЛЯ БАТАРЕИ КОКСОВЫХ ПЕЧЕЙ С УТИЛИЗАЦИЕЙ ТЕПЛА | 2011 |
|
RU2593613C2 |