1
Изобретение относится к области автоматизации технологического процесса обработки деталей и может быть использовано в устройствах для отделения листов от стопы и подачи листов для дальнейшей обработки.
Известно устройство для отделения листовой заготовки от стопы, содержащее вакуумные присосы, установленные под магазином листовых заготовок на штоках, которые связаны через закрепленный на них золотник с приводом. Управление золотником осуш,ествляется посредством копиров, взаимодействующих с плунжерами золотника .
Известное устройство применимо только для отделения тонких листов типа бумаги. Это связано с тем, что известная конструкция рассчитана на отделение листов снизу стопы с одновременным их прогибом, что неприемлемо для листовых металлических заготовок. Кроме того, подача атмосферного давления к лрисоскам осуществляется во время движения присосок, что не позволяет получить паузу для подвода приемных устройств.
Наиболее близким по конструкции к изобретению является вакуумный захватный орган, содержащий основание с ук.репленными на нем направляющими, установленный в них с возможностью перемещения в направлении, перпендикулярном поверхности захватываемой заготовки, держатель, в котором закреплен полый корпус
с присоской. На оси в корпусе установлен качающийся рычаг, один конец которого имеет возможность взаимодействия с установленным на основании на пути движения держателя неподвижным упором, а
ДРУГОй конец щарнирно связан с щтоком, снабженным поршнем и расположенным в полом корпусе. Шток соединен центральным отверстием с полостью присоски. Для нарушення вакуума щток снабжен золотниковым устройством, установленным в верхней его части, выступающей нз полого корпуса. Шток снабжен также пружиной, действующей на поршень в направлении, обратном направлению движения держателя. В этом вакуумном захватном органе сброс заготовки, т. е. нарушение в полости присоски, происходит в конце хода держателя при помощи неподвижного упора. При этом момент сброса заготовки
с присоски не связан с моментом подачи приемного устройства для передачи ориентированной заготовки в основное оборудование, например пресс, для обработки 2. Недостатком известного вакуумного захватного органа является то, что он не
обеспечивает возможности работы в автоматическом режиме с основным оборудованием, так как в нем не предусмотрен синхронизирующий аппарат, связываюш ин работу этого захватного органа с работой приемника, например лотка основного оборудования (устройства для дальнейшего перемещения).
Целью изобретения является обеспечение синхронизации работы захватного органа с устройством для дальнейшего перемещения заготовки В плоскости, перпендикулярной оси корпуса.
Поставленная цель достигается тем, что захватный орган снабжен двуплечим рычагом, щарнирно закрепленным в держателе и взаимодействующим одним концом с качающимся рычагом, а другим - с устройством для дальнейщего перемещения, а механизм разгерметизации выполнен в виде входящего в отверстие подпружиненного стержня с -пазом, в котором расположен один конец качающегося рычага.
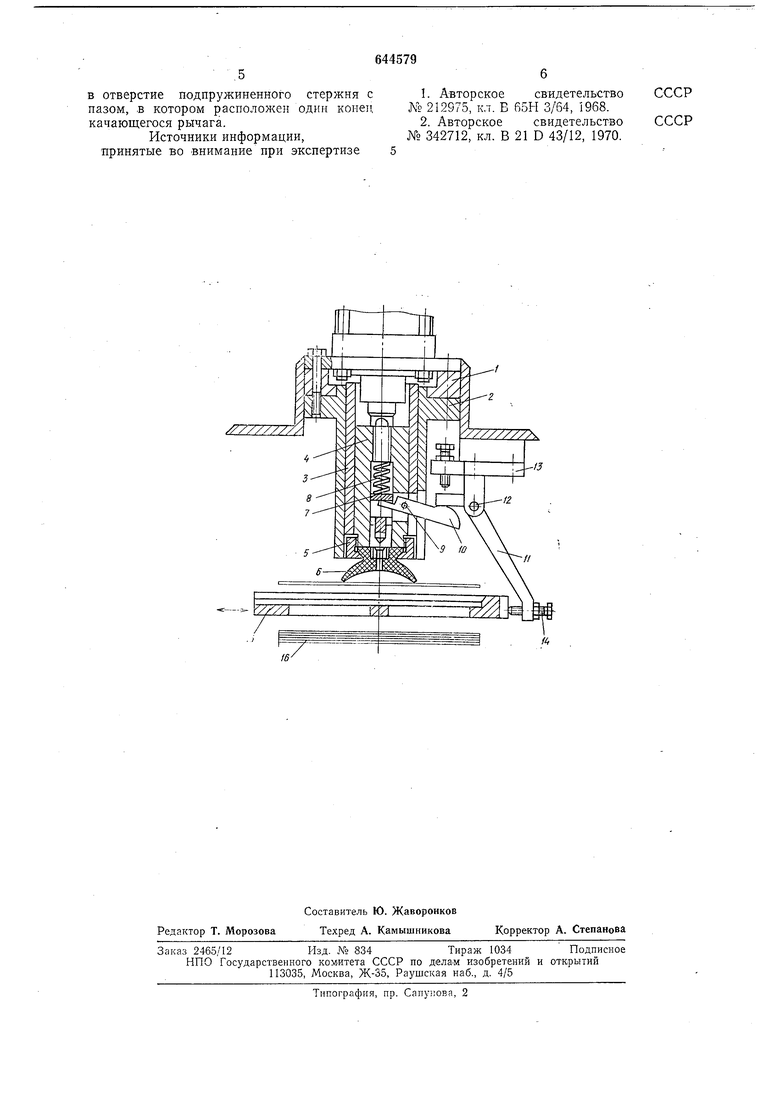
На чертеже изображен захватный орган.
Вакуумный захватный орган содержит закрепленную на основании 1 направляющую, выполненную в виде втулки 2 с фланцем. Во втулке 2 установлен с возможностью перемещения в ней в направлении, перпендикулярном поверхности заготовки, держатель 3. В держателе 3 закреплен полый корпус 4, на нижнем торце которого при помощи гайки 5 закреплена присоска
6.В полом корпусе 4 установлен стержень
7,служащий для перекрытия отверстия присоски 6, соединяющего ее полость с атмосферой. Стержень 7 поджат пружиной 8, действующей по направлению к присоске. В полом корпусе 4 на оси 9 установлен качающийся двуплечий рычаг Ю, один конец которого размещен в пазу стержня 7, а второй находится в периодическом контакте с одним из концов двуплечего рычага 11, установленного щарнирно с помощью оси 12 на кронщтейне 13, прикрепленном к основанию 1. Другой конец двуплечего рычага 11, на котором установлен регулировочный винт 14, находится также в периодическом контакте с торцом приемного лотка 15, -подвижного относительно основания 1.
Захватный орган работает следующим образом.
При движен-ии вниз держателя 3 с корпусом 4 присоска 6 соприкасается с листовой заготовкой, находящейся в стопе 16. При этом между присоской 6 и стопой 16 с заготовками приемного лотка 15 нет, он находится в -крайнем левом положении. Конец двуплечего рычага 11 с регулировочным винтом 14 находится в свободном состоянии, вследствие этого свободен и конец двуплечего рычага 10, выступающего из полого Kopinyca 4. Одновременно стержень 7 под действием пружины 8 перекрывает отверстие в присоске 6. При дальнейшем движении держателя 3 присоска 6 расплющивается па заготовке, воздух выходит из-под присоски 6 и создается разрежение, достаточное для захвата заготовки. Держатель 3, корпус 4 и присоска 6 с захваченной заготовкой поднимаются до своего крайнего верхнего положения. Приемный лоток 15 -подводится под захваченную заготовку.
10 В конце своего хода приемный лоток 15 торцом налсимает на регулировочный винт 14, установленный на конце двуплечего рычага 11, и этим разворачивает его -вокруг оси 12. Другой коиец двуплечего рычага 11
15 давит на свободный конец двуплечего рычага 10, который в свою очередь поворачивается -вокруг своей оси 9 и противополож-; ным концом, расположенным в пазу стерж-. ня 7, поднимает его, преодолевая усилие
0 пружины 8. При этом открывается отверстие присоски, соединяя ее полость с внещ ней средой. Это положение показано на чертеже. После выравнивания давлений в -полости присоски и внещней среды заго5 товка падает на лоток 15.
Таким образом, отделение заготовки от присоски происходит автоматически и только тогда, когда приемный лоток оказыва-ется точно -под заготовкой, т. е. работа
0 захватного органа синхронизирована с подачей приемного лотка.
Предлагаемое устройство обеспечивает надежную работу в автоматическом режиме с основным оборудованием без каких5 либо дополнительных синхронизирующих аппаратов.
Испытания показали, что захватный орган для отделения листовой заготовки от стопы работоспособен в автоматическом режиме работы, и заготовка падает на приемный лоток питателя в точно отрегулированный момент.I
Формула изобретения
5 Вакуумный захватный орган, содержащий закрепленный в держателе, подвижном в осевом направлении, корпус с присоской для захвата плоской заготовки, выполненный с полостью, которая соединена
0 отверстием с полостью в присоске, а также содержащий механизм разгерметизации, размещенный в полости корпуса и приводимый в движение через качающийся рычаг, щарнирно закрепленный в корпусе,
5 отличающийся тем, что, с целью обеспечения синхронизации работы захватного органа с устройством для дальнейщего перемещения заготовки в плоскости, перпендикулярной оси корпуса, захватный орган
Q снабжен двуплечим рычагом, шарнирно закрепленным в держателе и взаимодействующим одним концом с качающимся рычаго-м, а другим - с устройством для дальнейшего перемещения, а механизм раз5 герметизации выполнен в виде входящего
в отверстие подпружиненного стержня с пазом, в котором расположен один конец качающегося рычага.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство № 212975, кл. Б 65Н 3/54, 1968.
2.Авторское свидетельство jNb 342712, кл. В 21 D 43/12, 1970.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный захватный орган | 1981 |
|
SU1005996A1 |
| Вакуумный захватный орган | 1980 |
|
SU904846A1 |
| Вакуумный захватный орган | 1980 |
|
SU912617A1 |
| Вакуумный захватный орган | 1981 |
|
SU1107936A1 |
| Вакуумный захватный орган | 1981 |
|
SU1011308A1 |
| Устройство для поштучной подачи листовых заготовок в рабочую зону пресса | 1990 |
|
SU1727946A1 |
| Устройство для отделения листа от стопы и подачи его в рабочую зону пресса | 1978 |
|
SU733810A1 |
| Устройство для отделения верхнего листа от стопы | 1980 |
|
SU965568A1 |
| Вакуумный захватный орган | 1982 |
|
SU1107937A1 |
| Устройство для вырубки заготовок из плоского материала | 1983 |
|
SU1139546A1 |
/4
