00
со
00 00
Изобретение относится к электротехнике, а именно к автгоматлзированному электроприводу постоянного тока, и может быть использовано в быстродействующих электроприводах подач ме таллорежущих станков. . Известен электропривод, выполненный по системе подчиненного регулирования в виде каскадного соединения замкнутых контуров с регуляторами, к входам которых подключены выходы датчиков соответствующих контуров Ul Недостатком известного электропривода является то, что датчики тока и напряжения, а также скорости наряду с гладкой составляющей на вхо преобразователя передают и переменны составляющие сигнала, вызванные дискретностью преобразователя, что снижает точность поддержания регулируемого параметра - скорости электродви гателя и не позволяет существенно по высить быстродействие всей системы электропривода. Наиболее близким по технической сущности является электропривод, содержащий последовательно соединенные электродвигатель с тахогенератором, преобразователь, регулятор скорости, первый узел сравнения, задатчик интенсивности, а также корректирующее звено, выход которого соединен с вто рым входом первого узла сравнения С2 Недостатком такого электропривода являемся то, что в нем невозможно существенно повысить точность регулирования скорости из-за присутствия в обратных связях по току и скорости переменных составляющих сигналов, обусловленных дискретностью преобразователя, что снижает быстродействие электропривода. Кроме того, взятие производной (корректирующим звеном в контуре тока) усиливает переменную составляющую и без того пульсирующего тока, особенно при использовании преобразрвателей с раздельным управлением, когда среднее значение номинального тока может не иметь постоянной составляющей (т.е. прерывистый режим тока) при использовании малоинерционных электродвигателей, что существенно снижает помехозащищенность всей системы регулирования. Цель изобретения - повышение качества регулирования и увеличение бы стродействия электропривода. Поставленная цель достигается тем что в электропривод, содержащий последовательно соединенные Электродвигатель с тахогенератором, преобразователь, регулятор скорости, первый узел сравнения-, задатчик интенсивности, а -также, корректирующее зве но, выход которого соединен с вторым входом первого- узла сравнения, дополнительно введены фильтр и последова-j тельно соединенные модель преобразователя, второй узел сравнения, модель электромагнитной цепи якоря электродвигателя, выход которой соединен с входом корректирующего звена, при этом вход фильтра соединен с тахогенератором, а выход - с третьим входбм первого узла сравнения и вторым вхбдом второго узла сравнения, вход модели преобразователя соединен с выходом регулятора скорости. На чертеже представлена структурная схема электропривода. Электропривод содержит последовательно соединенные электродвигатель 1С тахогенератором 2, преобразователь 3, регулятор 4 скорости, у.зел 5 сравнения, задатчик 6 интенсивности, а также корректирующее звено 7, выход которого соединен с вторым входом узла 5 сравнения. Кроме того, устройство содержит флиьтр 8 и последовательно соединенные модель 9 преобразователя, второй узел 10 сравнения, модель 11 электромагнитной цепи якоря электродвигателя, выход которой соединен с входом корректирующего звена 7, при этом вход фильтра В соединен с тахогенератором 2, а - с третьим входом узла 5 сравнения и вторым входом узла 10 сравнения. Вход модели 9 преобразователя соединён с выходом регулятора 4 скорости. В зависимости от требований,предъявляемых к системе автоматического регулирования скорости электропривода, и от параметров силовой цепи электропривода модель 9 преобразователя может быть взята в виде трех видов. Модель 9 преобразователя как безынерционное звено в виде коэффициен та . передачи К вплоть до частоты входного сигнала, не превышающей частоту сети (а электродвигатель имеет среднее быстродействие I. Модель 9 преобразователя как,звено с чистым запаздыванием с временем запаздывания Г , при этом не учитывается переменность интервала дискретности. Модель 9 преобразователя как tзвено, передаточная функция которого описывается выражением (1- ) где Т является линейной функцией управляющего сигнала, изменяясь приэтом в функции величины управляющего сигнала от нуля до определенной максимальной величины. Данная модель берется тогда, когда система автоматического регулирования скорости электропривода должна иметь высокое быстродействие. Для больишнства станочных электроприводов удовлетворительным быстроействием .(по полосе пропускания частот) является частота входного воздействия 50 Гц. В связи с этим модель преобразователя в данном случае может быть взята в виде безынерционного звена как коэффициент передачи Используемые малоинерционные элек тродвигатели в машиностроении имеют высокое быстродействие, что приводит при малых скоростях их работы (когда момент инерции электродвигателя и нагрузки не сглаживает пульсации скорости от дискретного характера тока преобразователя) к росту переменной составляющей сигнала в обратной связи по скорости (фактор пульсаций), что.также снижает общий коэф фициент передачи всей системы. Частота этой переменной составляющей равна частоте переключения вентилей преобразователя и равна mfc .Гц. Для устранения этого нежелательного явле ния в системе использован в цепи обратной связи по скорости активный .фильтр низкой частоты с коэффициенто подавления несущей частоты преобразователя (mfe) порядка 60 дБ, НО пропускающий рабочиечастоты системы iWp « mf с .. Электропривод работает следующим образом. Напряжение обратной связи по скорости, которое пропорционально ЭДС электродвигателя 1, вычитается в узле 10 сравнения из напряжения, снимаемого с модели 9 преобразователя (среднее его значение - гладкая составляющая). Полученная таким образом разность напряжений,проходя через модель 11 электромагнитной цепи якоря электродвигателя 1, преобразуется в сигнал то1/а электродвигателя 1 (среднее его значение - гладкая составляющая), который далее через корректирующее звено 7 по току (элемент дифференцирования присутствует) поступает на вход узла 5 сравнения. Выходное напряжение корректирующего звена 7 вычитается в узле 5 сравнения из напряжения задатчика 6 интенсивности. Полученная разность напряжений, проходя через регулятор 4 скорости и преобразователь 3,подается на электродвигатель 1.. Таким образом, в электроприводе обратная связь по среднему значению тока электродвигателя 1 (без потери быстродействия) позволяет без фильтрации .переменной составляющей тока на выходе преобразевателя 3 брать его производную без особых ограничений по уровню помех, что также значительно увеличивает статический коэффициент разомкнутой системы и, следовательно, обеспечивает более высокую статическую и динамическую точность работы электропривода, увеличивает его быстродействие.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока с двухзонным регулированием скорости | 1984 |
|
SU1159139A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Способ управления электроприводом постоянного тока | 1982 |
|
SU1150721A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
| Электропривод постоянного тока | 1981 |
|
SU1001409A1 |
| Устройство для управления электроприводом постоянного тока | 1980 |
|
SU936320A1 |
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
ЭЛЕКТРОПРИВОД, содержащий последовательно соединенные электродвигатель с тахогенератором, преобразователь, регулятор скорости, первый узел сравнения, задатчик интенсивности, а также корректирующее звено. выход которого соединен с вторым входом первого узла сравнения, о т л и ч ающий с я тем, что, с целью повышения качества регулирования и увеличения быстродействия, в него дополнительно введены фильтр и последовательно соединенные модель преобразователя, второй узел сравнения, модель электромагнитной цепи якоря электродвигателя, выход которой соединен с входом корректирующего звена, при этом вход фильтра соединен с тахогенератором, а выход - с третьим входом первого узла сравнения и вторым входом второго узла сравнения, вход модели преобразователя соединен с выходом регулятора скорости. §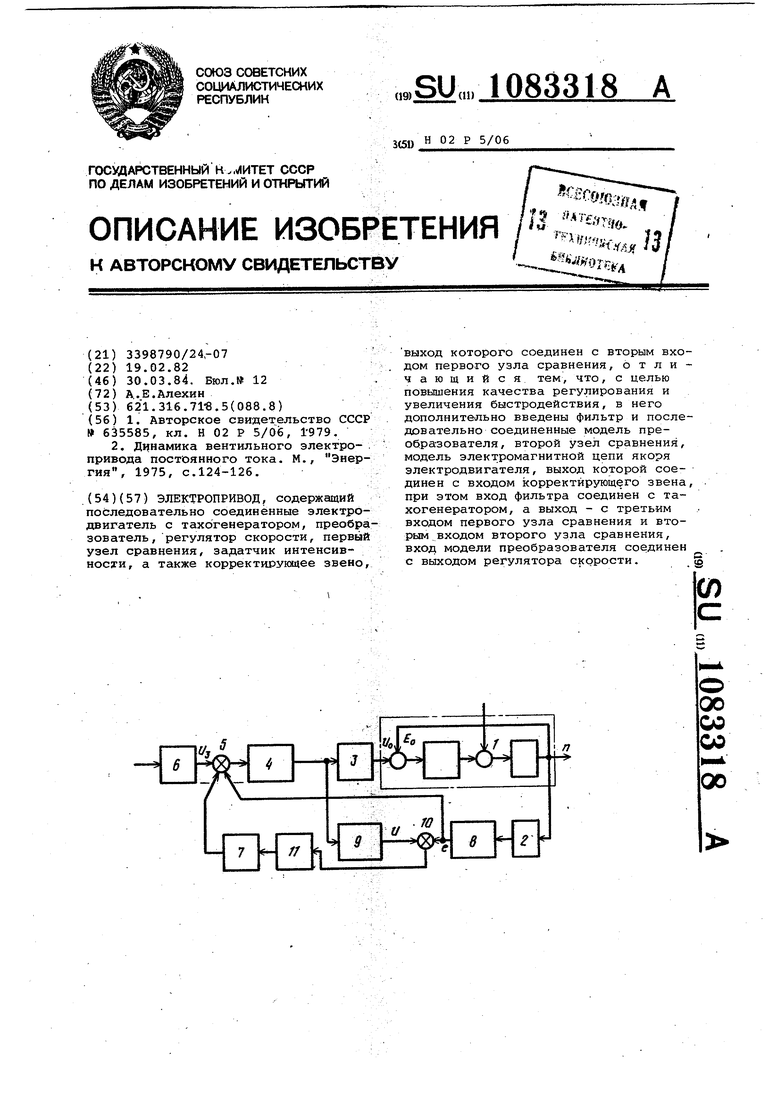
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического управления электроприводом | 1976 |
|
SU635585A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Дцнамика вентильного электро-, привода постоянного тока | |||
| М., Энергия, 1975, с.124-126 | |||
| . | |||
