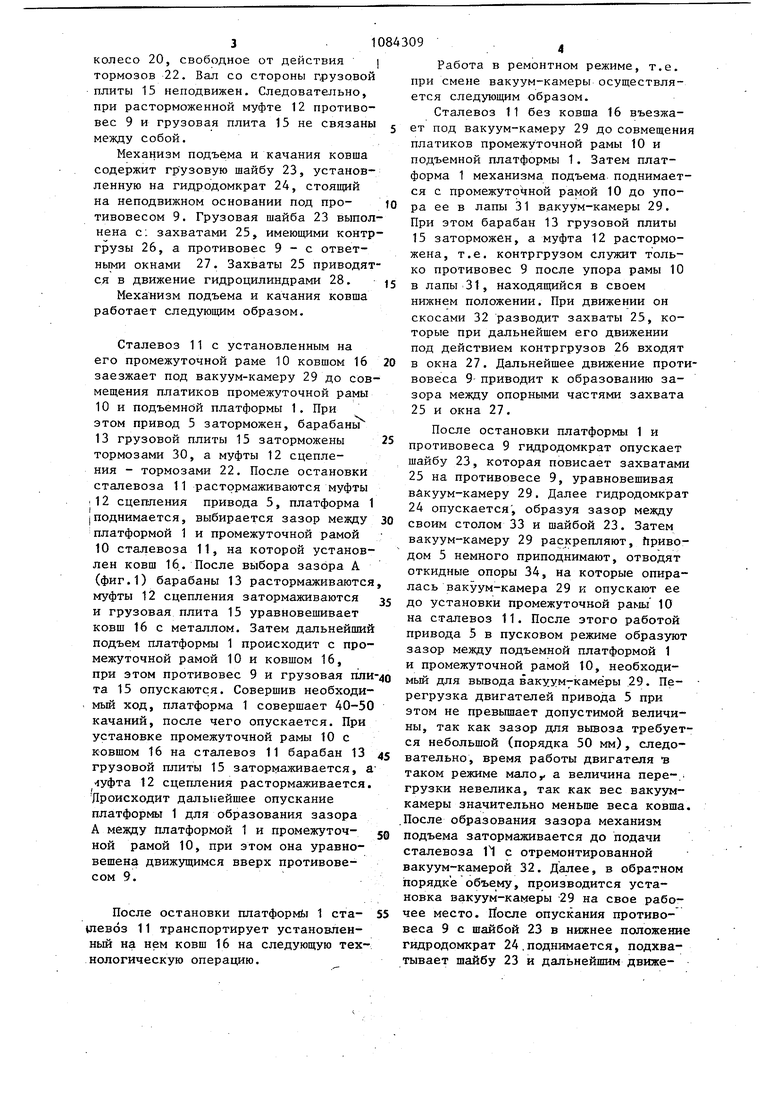
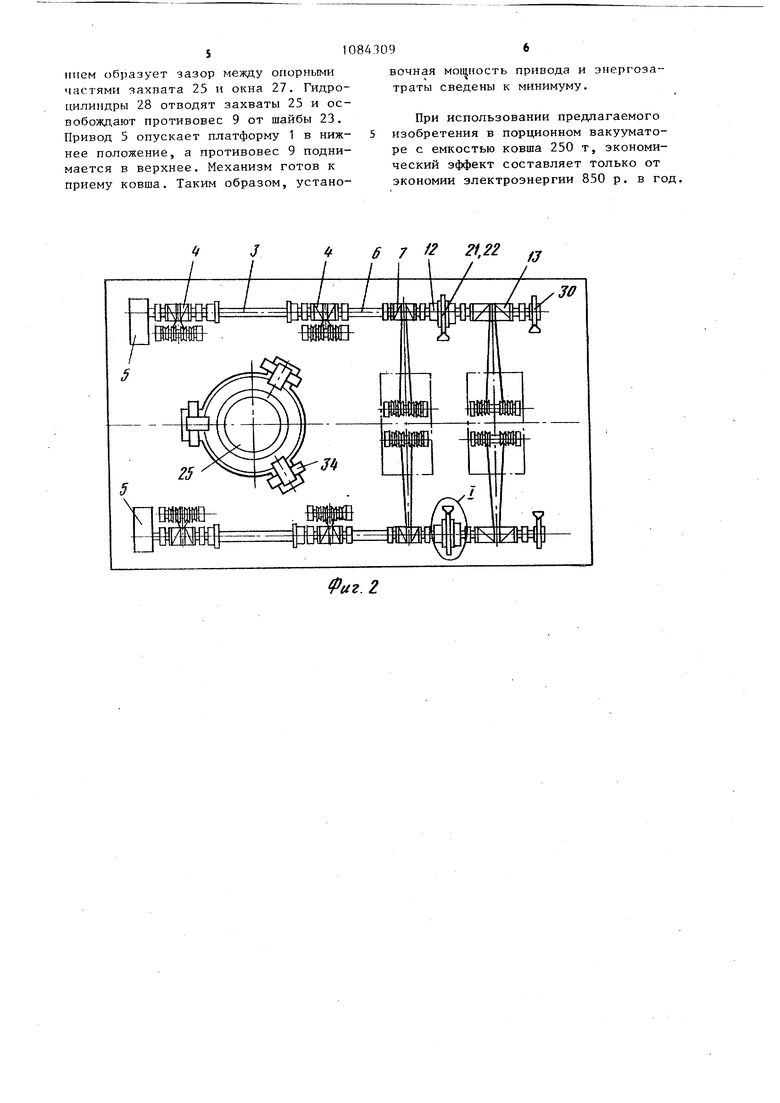
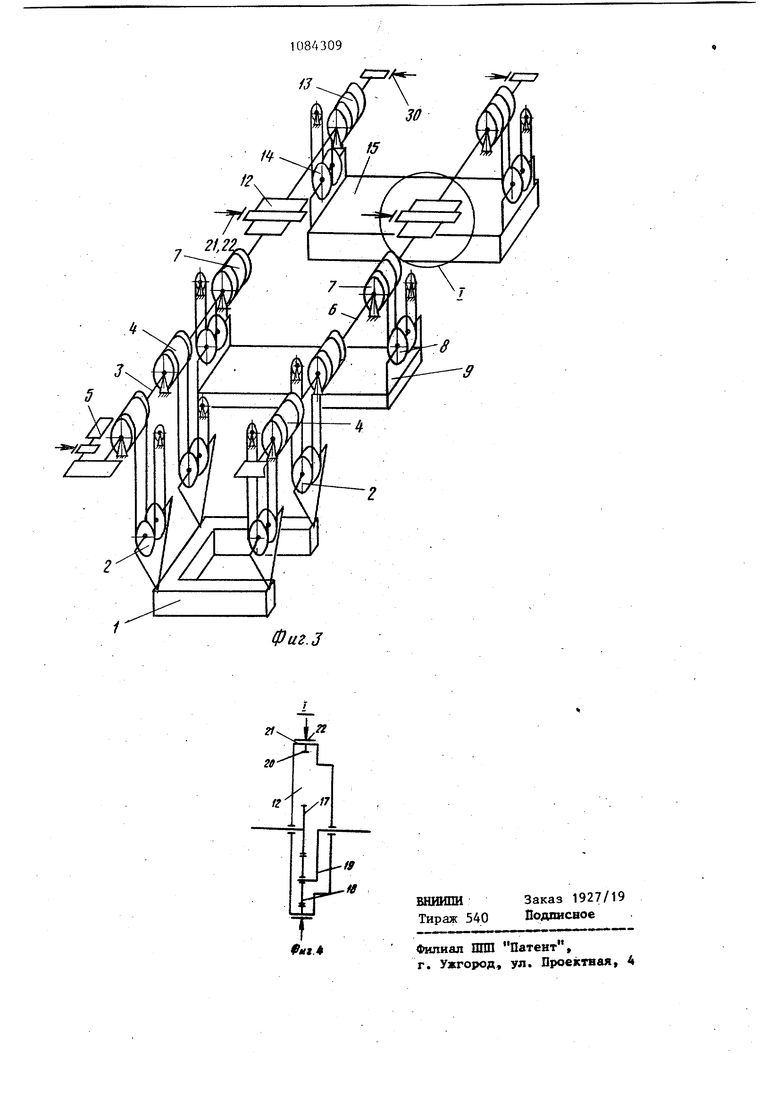
Изобретение относится к металлур гическому оборудованию и может быть использовано в механизме подъема и качания ковша при вакуумировании стали с неподвижной вакуум-камерой. По основному авт.св. № 829685, известен механизм подъема и качания ковша, содержащий неподвижную опоРУ грузоподъемную платформу с приводом вертикального перемещения и уравновешивающим противовесом, грузовую плиту, взаимодействую цую с противовесом посредством следящей системы, а с неподвижной опорой - посредством тормозной системы Следящая система выполнена в виде поворотно установленных в опорах грузовой плиты кривошипов с цапфами снабженными тормозными шкивами, взаимодействующими с тормозами. Тор мозная система выполнена в виде цепной подвески, один из концов каждой цепи .которой закреплен на грузовой плите, а другой свободно огибает звездочку, установленную в подшипниковых опорах на неподвиж ной опоре и снабженную тормозным шкивом, взаимодействующим с тормозо Такая конструкция обеспечивает перемещение пустой подъемной платформы для выбора и образования зазора, необходимого для подачи оче редного ковша, а также перемещение платформы с ковшом во время вакууми рования с незначительными энергозатратами за счет полного уравновешивания с помощью противовеса и грузовой плиты Л . Однако, в ремонтном режиме при смене вакуум-камеры, вес которо существенно меньше веса ковша, ваку ум-камера оказывается либо неуравно вешенной, либо она частично уравновешивает вес грузовой плиты. В обеих случаях неуравновешенньй вес воспринимается приводом. Это вызыва ет повьш1енные установочные мощности привода и энергозатраты. Цель изобретения - снижение уста новочной мощности привода и энергозатрат. Поставленная цель достигается тем, что механизм подъема и качания ковша по авт.св. № 829685 снабжен грузовой шайбой, взаимодействующей с противовесом посредством захвата и установленной на домкрате, которы расположен на неподвижной опоре. На фиг. Г изображен механизм подъема и качания ковша, общий вид, на фиг. 2 - то же, вид сверху; на фиг. 3 - кинематическая схема механизма без грузовой шайбы; на фиг. 4 - узел I на фиг. 2 и 3. Механизм подъема и качания ковша включает подъемную платформу 1, выполненную в виде П-образной пространственной рамы, подвешенной по углам на 4-х полиспастах 2. Канаты полиспастов 2 навиты на попарно соединенные промежуточным валом 3 барабаны 4, приводимые во вращение приводом 5. Барабаны 4 муфтой 6 соединены с барабанами, на которых подвешен на 2-х полиспастах 8 противовес 9, создающий крутящий момент, противоположньш моменту со стороны платформы 1 и служащий для уравновешивания платформы 1 с промежуточной рамой 10 сталевоза 11. Барабаны 7, на которых подвешен противовес 9, посредством, следящей системы, выполненной в виде планетарных зубчатых муфт 12 сцепления, соединены с барабанами 13, снабженными тормозной системой, на которых подвешена на 2-х полиспастах 14 грузовая плита 15, уравновешивающая ковш 16 со сталью при вакуумировании, так как она создает крутящий момент противоположного направления моменту со стороны подъемной платформы 1 с ковшом 16. Планетарная зубчатая муфта 12 сцепления состоит из солнечного колеса 17, сателлитов 18 водила 19, коронного колеса 20, имеющего тормозной шкив 21, взаимодействуюшргй с тормозами 22 (фиг.4). При заторможенном тормозами 22 коронном колесе 20 при вращении вала со стороны противовеса 9 вращается солнечное колесо 17, сателлиты 18 обкатываются по неподвижному коронному колесу 20, вращаются водило 19. и вал со стороны грузовой плиты 15. Муфта 12 работает как планетарный редуктор. Следовательно, при заторможенной муфте 12 сцепления (заторможенном коронном колесе 20), противовес 9 и грузовая плита 15 кинематически связаны. При расторможенной муфте 12 сцепения при вращении вала со стороны . противовеса 9 вращаются солнечное колесо 17, сателлиты 18 на водиле 19, приводя во вращение коронное 3 . колесо 20, свободное от действия тормозов 22. Вал со стороны г,рузовой плиты 15 неподвижен. Следовательно, при расторможенной муфте 12 противовес 9 и грузовая плита 15 не связаны между собой. Механизм подъема и качания ковша содержит грузовую шайбу 23, установленную на гидродомкрат 24, стоящий на неподвижном основании под противовесом 9. Грузовая шайба 23 выпол нена с: захватами 25, имеющими контр грузы 26, а противовес 9 - с ответными окнами 27. Захваты 25 приводят ся в движение гидроцилиндрами 28. Механизм подъема и качания ковша работает следующим образом. Сталевоз 11 с установленным на его промежуточной раме 10 ковшом 16 заезжает под вакуум-камеру 29 до сов мещения платиков промежуточной рамы 10 и подъемной платформы 1. При этом привод 5 заторможен, барабаны 13 грузовой плиты 15 заторможены тормозами 30, а муфты 12 сцепления - тормозами 22. После остановки сталевоза 11 растормаживаются муфты 12 сцепления привода 5, платформа Iподнимается, выбирается зазор между платформой 1 и промежуточной рамой 10 сталевоза 11, на которой установ лен ковш 16. После выбора зазора А (фиг.1) барабаны 13 растормаживаются муфты 12 сцепления затормаживаются и грузовая плита 15 уравновешивает ковш 16 с металлом. Затем дальнейший подъем платформы 1 происходит с промежуточной рамой 10 и ковшом 16, при этом противовес 9 и грузовая пли та 15 опускаются. Совершив необходимьш ход, платформа 1 совершает 40-5 качаний, после чего опускается. При установке промежуточной рамы 10 с ковшом 16 на сталевоз 11 барабан 13 грузовой плиты 15 затормаживается, а -1уфта 12 сцепления растормаживается Происходит дальнейшее опускание платформы 1 для образования зазора А между платформой 1 и промежуточной рамой 10, при этом она уравновешена движущимся вверх противовесом 9. После остановки платформЬ 1 стащевсэз 11 транспортирует установленный на нем ковш 16 на следующую технологическую операцию. 09 Работа в ремонтном режиме, т.е. при смене вакуум-камеры осуществляется следующим образом. Сталевоз 11 без ковша 16 въезжает под вакуум-камеру 29 до совмещения платиков промежуточной рамы 10 и подъемной платформы 1. Затем платформа 1 механизма подъема поднимается с промежуточной рамой 10 до упора ее в лапы 31 вакуум-камеры 29. При этом барабан 13 грузовой плиты 15 заторможен, а муфта 12 расторможена, т.е. контргрузом служит только противовес 9 после упора рамы 10 в лапы 31, находящийся в своем нижнем положении. При движении он скосами 32 разводит захваты 25, которые при дальнейшем его движении под действием контргрузов 26 входят в окна 27. Дальнейшее движение противовеса 9 приводит к образованию зазора между опорными частями захвата 25 и окна 27. После остановки платформы 1 и противовеса 9 гидродомкрат опускает шайбу 23, которая повисает захватами 25 на противовесе 9, уравновешивая вйкуум-камеру 29. Далее гидродомкрат 24 опускается, образуя зазор между своим столом 33 и шайбой 23. Затем вакуум-камеру 29 раскрепляют, йриводом 5 немного приподнимают, отводят откидные опоры 34, на которые опиралась вакуум-камера 29 и опускают ее до установки промежуточной рамы 10 на сталевоз 11. После этого работой привода 5 в пусковом режиме образуют зазор между подъемной платформой 1 и промежуточной рамой 10, необходимый для вывода вакуум7камёры 29. Пе- регрузка двигателей привода 5 при этом не превышает допустимой величины, так как зазор для вьюоза требуется небольшой (порядка 50 мм), следовательно, время работы двигателя в таком режиме мало,- а величина пере-. грузки невелика, так как вес вакуумкамеры значительно меньше веса ковша. После образования зазора механизм подъема затормаживается до подачи сталевоза 11 с отремонтированной вакуум-камерой 32. Далее, в обратном порядке объему, производится установка вакуум-камеры -29 на свое рабо- чее место. Йосле опускания противовеса 9 с шайбой 23 в нижнее псложение гидродомкрат 24.поднимается, подхватывает шайбу 23 и дальнейшим движепнем образует зазор между опорньми частями захвата 25 н окна 27. Гидроцилиндры 28 отводят захваты 25 и освобождают противовес 9 от шайбы 23. Привод 5 опускает платформу 1 в нижнее положение, а противовес 9 поднимается в верхнее. Механизм готов к приему ковша. Таким образом, установочная Moii HocTfj привода и энергозатраты сведены к минимуму.
При использовании предлагаемого изобретения в порционном вакууматоре с емкостью ковша 250 т, экономический эффект составляет только от экономии электроэнергии 850 р. в год.
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм подъема и качания ковша | 1979 |
|
SU829685A1 |
| КРАН ДЛЯ ОБРАЩЕНИЯ С ОТРАБОТАВШИМ ЯДЕРНЫМ ТОПЛИВОМ В ЗАЩИТНОЙ КАМЕРЕ | 2007 |
|
RU2352516C1 |
| Подъемно-транспортная машина вакууматора | 1978 |
|
SU836129A1 |
| МАШИНА ДЛЯ ВЫКАЧИВАНИЯ ВОЗДУХА ИЗ ЖЕСТЯНОК И ЗАКРЫВАНИЯ ИХ | 1929 |
|
SU38520A1 |
| КРАН СТРЕЛОВОГО ТИПА | 2006 |
|
RU2305064C1 |
| Сталевоз | 1977 |
|
SU682321A1 |
| Подъемно-транспортная машина вакууматора | 1978 |
|
SU742467A1 |
| Центробежная машина для формовки, преимущественно, бетонных изделий | 1937 |
|
SU58243A1 |
| ПОДЪЕМНИК АВТОМОБИЛЕЙ | 2000 |
|
RU2169692C1 |
| Вакууматор | 1981 |
|
SU1020443A1 |
МЕХАНИЗМ ПОДЪЕМА И КАЧАНИЯ КОВША по авт.св. № 829685, отличающийся тем, что, с целью снижения установочной мощности привода и энергозатрат, механизм снабжен грузовой шайбой, взаимодей ствующей с противовесом посредством захвата и установленной на домкрате , который расположен на неподвижной опоре.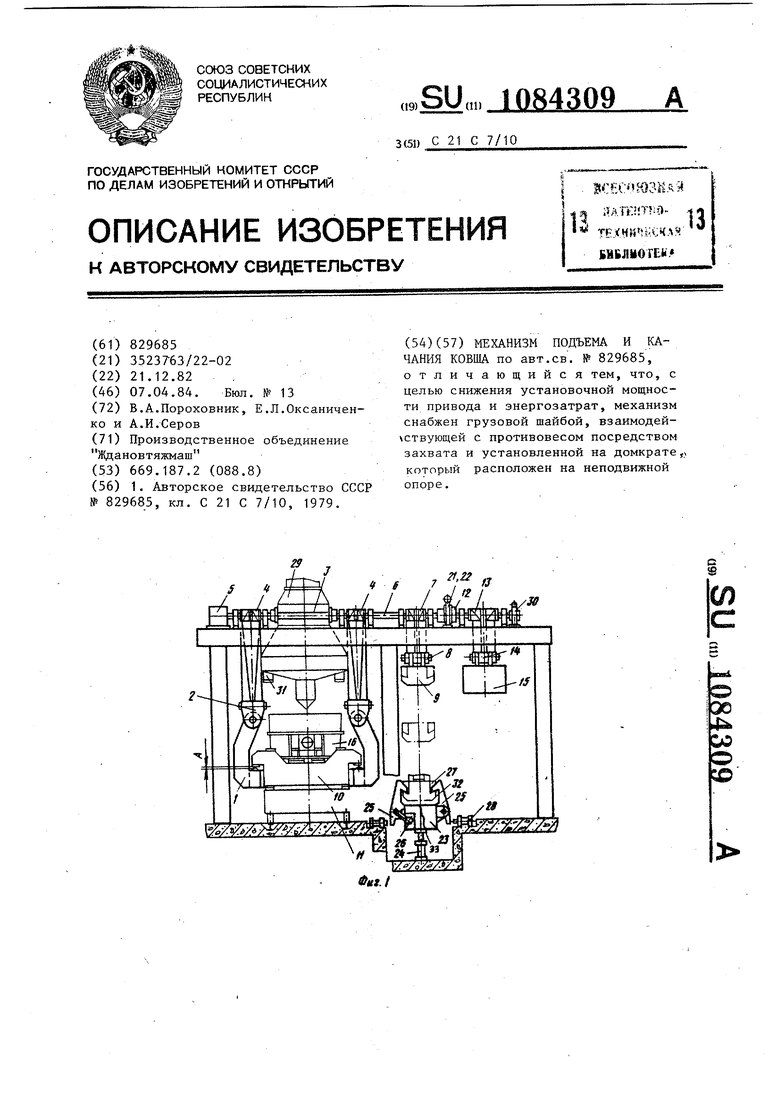
Фиг. г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Механизм подъема и качания ковша | 1979 |
|
SU829685A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
