блока послеударного отсчета величины перемещения соединен с входом ис полнительного элемента этого блока, выход исполнительного элемента блока послеударного отсчета величины перемещения соединен с входами исполнительных механизмов направления перемещения через эадатчик направления перемещения, с входом исполнительного элемента блока отсчета длн тельности удара от эадатчика направления перемещения через переключатель задержки удара и задатчик режимов, с задатчиком задержки удара через переключатель задержки удара и задатчики направления вращения и перемещения, выход блока задержки на вращение-перемещение соединен с входом исполнительного элемента это го блока, выход исполнительного элемента блока задержки на вращениеперемещение соединен через переключатель задержки на вращение-перемещение и через задатчики направления вращения и перемещения с задатчиками угла вращения и величины перемещения, с исполнительными механизмами направления вращения, с исполнительными механизмами направления перемещения, выход блока отсчета задержки удара после вращения-перемещения соединен с входом исполнительного элемента этого блока, выход исполнительного элемента блока отсчета задержки удара после вращения-перемещения соединен через переключатель задержки ударов от задатчиков направления вращения и перемещения через задатчик режимов с входом исполнительного элемента блока отсчета длительности удара.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU738739A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления высотой хода над грунтом рабочего органа подводного добывающего устройства | 1982 |
|
SU1062114A1 |
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1983 |
|
SU1076175A1 |
| Система управления прессом | 1988 |
|
SU1620329A2 |
| УСТРОЙСТВО ПРОГРАММНОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 1988 |
|
SU1503490A1 |
| Система управления молотом | 1983 |
|
SU1082536A1 |
| Выталкиватель виброизолированного штамповочного молота | 1986 |
|
SU1366273A1 |
| Устройство для определения механических свойств грунтов | 1988 |
|
SU1599704A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ковочньа молотом и МЕХАНИЗМОМ ОРИЕНТАЦИИ поковки, содержащее цилиндр управления с рабочей и установочной ступенями, шток которого кинематически связан с золотником молота, пневмораспределители рабочей ступени, соединенные с ее полостями через регулируемые дроссели, пневмораспределители установочных ступеней функциональные блоки приема команд, автоматического режима и исходной готовности, задатчик режимов, блрк тиристорных преобразователей, электромагниты пневмораспределителей, задатчики направления вращения и перемещения, блоки послеударного отсчета угла вращения и величины перемещения, задатчики угла вращения и величины перемещения, блок изменения скорости вращения с задатчиком скорости вращения, блок изменения скорости перемещения с задатчиком скорости перемещения, о т л и ч а ющ е е с я тем, что, с целью повышения надежности, оно снабжено блоками отсчета длительности удара с задатчиком и исполнительным элементом, длительности холостого хода падающих частей с задатчиком и исполнительным элементом, задержки на вращение-перемещение с задатчиком и исполнительным элементом, задержки удара после вращения-перемещения с задатчиком и исполнительным элементом, исполнительными элементами блоков отсчета послеударного вращения и перемещения, переключателем задержки удара и переключателем задержки на вращение-перемещение, при этом выход блока автоматического режима соединен с входом блока приема команд, выход блока отсчета длительности удара соединен с входом исполнительного элемента этого блока, выход исполнительного элемента блока отсчета длительности удара соединен с входом блока приема команд через переключатель задержки на вращениеперемещение и через задатчики направления вращения и перемещения соединен с задатчиками угла вращения и величины перемещения, с задатчиком задержки на врёидение-перемещение, i с исполнительными механизмами направления вращения,с исполнительными (Л механизмами направления перемещения и задатчиком длительности холостого хода через задатчик режимов и задатчики направления вращения и перемещения, выход блока отсчета длитель-. ности холостого хода соединен с входом исполнительного элемента этого блока, выход исполнительного элемента блока отсчета длительности холостого хода соединен с входом исполни тельного элемента блока отсчета длительности удара через задатчики направления вращения и перемещения и задатчик режимов, выход блока послеударного отсчета угла вращения соеди to нен с входом исполнительного элемента этого блока, выход исполнительного элемента блока послеударного отсчета угла вращения соединен с входами исполнительных механизмов направления вращения через задатчик направления вращения, с входом исполнительного элемента блока отсчета длительности удара от задатчика направления вращения через переключатель задержки удара и задатчик режимов, с задатчиком задержки удара через переключатель згшержки удара и задатчики направле- ния вращения и перемещения, выход
. Изобретение относится к машиност роению, в частности к конструкции систем управления оборудованием для обработки давлением. Известно устройство для управления ковочным молотом и механизмом ориентации поковки, содержащее цилиндр угГравления с рабочей и устано вочной ступенями, шток которого кинематически связан с золотником молота, пневмораспределители рабочей ступени, соединенные с ее полостями через регулируемые дроссели, пневмораспределители установочных ступеней функциональные блоки приема команд, автоматического режима и исходной готовности, задатчик режимов, блок тиристорных преобразователей, электромагниты пневмораспределителей, задатчики направления вращения и перемещения, блоки послеударного отсчета угла вращения и величины перемещения, задатчики угла вращения и величины перемещения, блок изменения скорости вреидения с задатчиком скорости вращения, блок изменения скорО сти перемещения Cl. Однако известное устройство не обеспечивает стабильной работы системы управления ковочныг/ молотом из-за вибрации датчиков контроля положениП падающих частей, что снижает надежность молота и механизма ориен тации поковки. Целью изобретения является повышение надежности работы. Поставленная цель достигается тем, что устройство для управления ковочным молотом и механизмом ориентадии поковки, содержащее цилиндр управления с рабочей и установочной ступенями, шток которого кинематически связан с золотником молота, пневмораспределители рабочей ступени, соединенные с ее полостями через регулируе1.1ые дроссели , пневмораспределители установочных ступеней, функциональные блоки приема команд, автоматического режима и исходной готовности, задатчик режимов, блок тиристорных преобразователей, электромагниты пневмораспределителей, задатчики направления вращения и перемещения, блоки послеударного отсчета угла вращения и величины перемещения, задатчики угла вращения и величины перемещения, блок изменения скорости вращения с задатчиком скорости вращения, блок :изменения; скорости перемещения с задатчиком скорости перемещения, снабжено блоками отсчета длительности удара с задатчиком и ис-. полнительным механизмом, длительности холостого хода падающих частей с задатчиком и исполнительным механизмом, задержки на вращение-перемещение с Зсщатчиком и исполнительным механизмом, задержки удара после вращения-перемещения с задатчиком и исполнительным механизмом, исполнительными механизмами блоков послеударного отсчета угла вращения и величины перемещения, переключателем задержки удара и переключателем задержки на вращение-перемещение, при этом выход блока автоматического режима соединен с входом блока приема
команд, выход блока отсчета длительности удара соединен с входом исполнительного механизма этого блока, выход исполнительного механизма бло,ка отсчета длительности удара соединен с входом блока приема команд через переключатель задержки на вращение-перемещение и через задатчики направления вращения и перемещения соединен с задатчиками угла вращения и величины перемещения, с защатчиком задержки на вращение-перемещение, с исполнительными механизмами направления вращения, с исполнительными механизмами направления перемещения и задатчиком длительности холостого хода через задатчик режимов и задатчики направления вращения и перемещения, выход блока отсчета длительности холостого хода соединен с входом исполнительного механизма этого блока, выход исполнительного механизма блока отсчета длительности холостого хода соединен с входом исполнительного механизма блока отсчета длительности удара через задатчики направления вращения и перемещения и задатчик режимов, выход блока послеударного отсчета угла вращения соединен с входом исполнительного механизма этого блока, выход исполнительного механизма блока послеударного отсчета угла вращения соединен с входами исполнительных механизмов направления вращения через задатчик направления вращения, с входом исполнительного механизма блока отсчета длительности удара от задатчика направления вращения через переключатель задержки удара и задатчик режимов, с задатчиком задержки удара через переключатель задержки удара и задатчики направления вращения и перемещения, выход блока послеударного отсчета величины перемещения соединен с входом исполнительного механизма этого блока, выход исполнительного механизма блока послеударного отсчета величины перемещения соединен с входами исполнительных механизмов направления перемещения через задатчик направления перемещения ,с входом исполнительного механизма блока отсчета длительности удара от задатчика направления перемещения через переключатель задержки удара и задатчик режимов, с задатчиком задержки удара через переключатель задержки удара и задатчики направления вращения и перемещения, выход блока задержки на вра1иение-перемещение соединен с входом исполнительного механизма этого блока, выход исполнительного механизма блока задержки на вращение-перемещения соединен через переключатель задержки на вращение-перемещение и через задатчики направления вращения и перемещения с задатчиками угла вращения и величины перемещения, с исполнительными механизмами направления вращения, с исполнительными механизмами направления перемещения, выход блока отсчета задержки удара после вращения-перемещения соединен с входом исполнительного механизма этого блока, выход исполнительного механизма блока отсчета задержки удара после
0 вращения-перемещения соединен через переключатель задержки удара от задатчиков направления вращения и перемещения через задатчик режимов с входом исполнительного механизма блока от5счета длительности -удара.
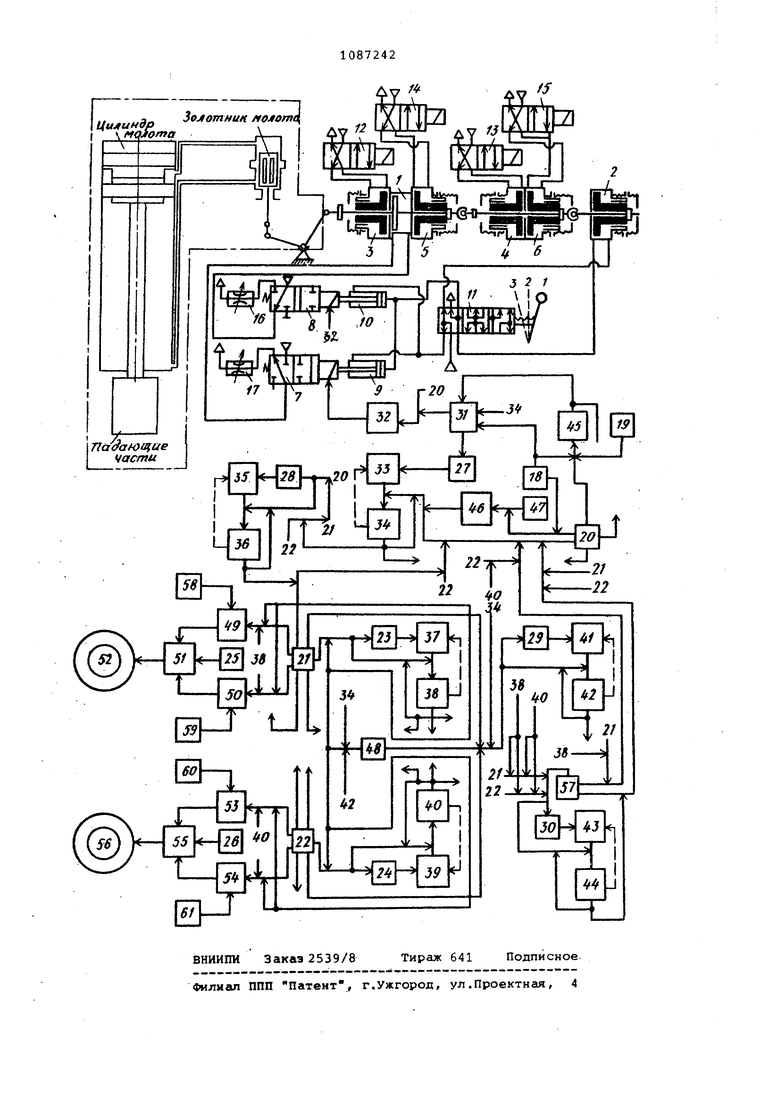
На чертеже изображена схема устройства для управления ковочным молотом и механизмом ориентации поковки.
Устройство содержит цилиндр управ0ления с рабочей ступенью 1 и установочными ступенями 2-6 (шток цилиндра управления кинематически соединен с золотником молота, пневмораспределители 7 и 8 рабочей ступени с
5 фиксирующими цилиндрами 9 и 10, пневмораспределители 11-15 установочных ступеней, дроссели 16 и 17 управления.
Для управления устройством служат
0 пусковая кнопка 18, кнопка 19 сброса, згшатчик 20 режимов, задатчики ориентации поковки-направления вращения (от себя-на себя) 21, направления перемещения (вперед-назад) 22, задатчи5ки угла поворота 23, величины перемещения 24, скорости вращения 25, скорости перемещения 26, длительности удара 27, длительности холостого хода падающих частей 28, задержки на
0 враидение-перемещение 29, задержки удара 30.
Для приема команд, выдаваемых кнопкой 18, служит блок 31, выход которого соединен с задатчиком 27 длительности удара, с блоком 32 ти5ристорных преобразователей через задатчик 20 режимов.
Устройство содержит также блоки отсчета длительности удара 33, которого соединен с входом ис0полнительного элемента 34, отсчета длительности холостого хода 35, выход которого соединен с входом исполнительного элемента 36, послеударного отсчета угла вращения 37, вы5ход которого соединен с входом исполнительного элемента 38, послеударного отсчета величины перемещения 39 , вьлход которого соединен с входом исполнительного элемента 40, отсче0та задержки на вра цение-перемещение 41, выход которого соединен с входом исполнительного элемента 42, отсчета задержки удара после вращения-перемещения 43, выход которого соединен с входом исполнительного элемента 44.
5 Для повышения точности отсчета один из выходов каждого исполнительного механизма соединен с разрядной цепь своего блока отсчета. Устройство также содержит блок 4 автоматического режима, вход которо го соединен с пусковой кнопкой 18, кнопкой 19 сброса через задатчик 20 режимов, а выход соединен с входом блока 31 приема команд. Блок 45 име ет блокировочную связь {со своего В хода На свой вход) через кнопку 19 и задатчик 20. Для установки схемы в исходное с стояние служит блок 46 исходной готовности, вход которого через перек |7початель 47 и задатчик 20 режимов связан с выходом блока 33 отсчета , длительности удара. Выход исполнительного механизма 34 соединен с входом блока 31, с разрядной цепью блока 33, задатчиком 28 и выходом блока 25 через задатчики 20-22; через переключатель 48 задержки на вращение-перемещение, задатчики 21 и 22 - соответственно с задатчиками 23, 24 и с выходами блоков 37 и 39, через переключатель 48 и задатчик 2 и 22 - с задатчиком 29 и с выходом блока 41; через переключатель 48 и задатчик 21 - с входами исполнительных механизмов 49 (от себя и 50 (на себя ), выходы которых соединены с входом блока 51 изменения скорости вращения, имеющего выход на электропривод 52, через переключатель 48, выход исполнительного механизма 40 и задатчик 22 - с входами исполнительных механизмов 53 (вперед и 54 (назад ), выходы которых соединены с входом блока 55 изменения скорости перемещения, имеющего выход на элект ропривод 56. Исполнительный элемент 34 имеет блокировочную связь через задатчик 20 и выход блока 46. Выход исполнительного элемента 36 соединен с разрядной цепью блока 35, выходом блока 33 через задатчики 21-20. Исполнительный элемент 36 имеет блокировочную связь через выход исполнительного механизма 34 и задатчики 22-20. Выход исполнительного элемента 38 соединен с разрядной цепью бло ка 37, задатчиком 30 и выходом блока 43 через переключатель 57 и задатчики 21 и 22, с выходом блока 33 через задатчики 20, 21 и переключатель 57 задержки удара, с исполнительными механизмами 49 и 50 через задатчик 21 и переключатель 48. Исполнительный элемент 38 имеет блокировочную связь через переключатель 48,.выходы блоков ЗА, 42 и задатчик 21. Выход исполнительного элемента 40 соединен с разрядной цепью блока 39, эадатчиком 30 через переключатель 57 и задатчики 21 и 22 , выходом блока 33 через задатчики 20 22 и переключатель 57 задержки удара, исполнительн1а1ми механизмами 53 и 54 через задатчик 22. Исполнительный элемент 40 имеет блокировочную связь через переключатель 48, выходы элементов 34 и 42 и задатчик 22. Выход исполнительного элемента 42 соединен с разрядной цепью блока 41} через переключатель 48, задатчики 21 и 22 - соответственно с задатчиками 23,24 и с выходами блоков 37 и 39; через переключатель 48, задатчик 21 - с входами исполнительных механизмов 49 и 50; через переключатель 48 и задатчик 22 - с входами исполнительных механизмов 53 и 54. Исполнительный механизм 42 имеет блокировочную связь через переключатель 48, задатчики 21, 22 и выход исполнительного элемента 34. Выход исполнительного элемента 44 соединен с разрядной цепью блока 43, выходом блока 33 через задатчик 22, 21 и переключатель 57. Исполнительный элемент 44 имеет блокировочную связь через задатчики 21, 22, выходы блоков 38, 40 и переключатель 57. Для управле- ния электроприводами 52 и 56 (механизма ориентации поковкиj при обычном вращении или перемещении без взаимодействия с. молотом служат переключатели 58 (от себя/, 59 (на себя, 60 (вперед/, 61 (назад/. Устройство работает в следующих режимах: настройка механизма ориентации поковки, одиночный удар, полуавтоматический режим, автоматический режим (доводка, шлихтовка/. А.Настройка механизма ориентации поковки (органы пневмоуправления находятся в положении, показанном на чертеже). Ключ задатчика 20 устанавливают на режиме Настройка, подключаются блок 33, исполнительный элемент 34, блок 45. Ключи задатчиков 21 и 22 устанавливают в соответствии с .вьлбранными направлениями враи(ения и перемещения поковки, к схеме подключаются блоки 37 и 39. Кнопкой 18 подается сигнал на вход блоков 31 и 45. При поступлении сигнала запуска на вход блока 31 на его выходе появляется сигнал, поступающий на вход блока 33 (сигнал с блока 31 на вход блока тиристорных преобразователей 32 не поступает, так как вход послед него о.тключен задатчиком 20, поэтому пневмораспределители 7 и 8 остаются в нерабочем состоянии и молот не работает). Сигнал с выхода блока 45 обеспечивает работу блока 31 при снятии сигнала, BLwaaaeMOi-o кнопкой 18. После определенного задатчиком 27 отсчета на выходе GjJOKa 33 появляется сигнал, поступающий на вход исполнительного элемента 34, При этом исполнительный элемент разряжает
емкостные элементы блока 33, устанавливает в рабочее состояние блоки 37 и 39 и исполнительные механизмы (например, 49 и 53 ).
Вращается и перемещается поковка на угол и величину, определяемую задатчиками 23 и 24. Одновременно сигнал с исполнительного элемента 34 нейтрализует сигнал на входе блока 31, прекращается подача сигнала на вход блока 33, последний устанавливается в нерабочее состояние.
После определенного задатчиками 23 и 24 отсчета сигнал с выхода каждого блока 37 и 39 поступает на вход соответствующих исполнительных механизмов 38 и 40, последние устанавливаются в рабочее состояние, разряжая при этом емкостные элементы блоков 37 и 39, снимая сигнал с входов исполнительных механизмов 49 и 53, обесточивая электроприводы 52 и 56. Прекращается вращение поковки и перемещение механизмов ориентации ее. При установке в рабочее состояние исполнительных элементов 38 и 40 сигнал с последних устанавливает в нерабочее состояние исполнительный механизм 34.
После установки исполнительного элемента 34 в нерабочее состояние с его выхода снимается сигнал нейтрализации, удерживающий в нерабочем состоянии блок 31, а так как блок 45 находится в рабочем состоянии, через его выход, при отсутствии сиг- нала нейтрализации с выхода исполнительного элемента 34, на вход блока 31 поступает сигнал запуска.
Дальнейшая работа в режиме Настройка, осуществляется как описано выше.Для прекращения работы в данном режиме достаточно нажать кнопку 19.
Б. Работа в режиме одиночного, удара (органы пневмоуправления находятся в положении, показанном на четеже ).
Ключ задатчика 20 устанавливают на режиме Одиночный удар, подключается блок 33, исполнительный элемент 34, блок 46 (устанавливающийся в рабочее состояние в момент устаноки задатчика 20 на режим Одиночный удар и обеспечивающий своим выходо нейтрализацию сигнала запуска на вхде исполнительного элемента 34) и блок 32 (блок 45 отключен).
При нажатии и удержании кнопки 1 подается сигнал на вход блока 31. С его выхода поступает сигнал на вход блока 33 и на вход блока 32, срабатывают электромагниты пневмораспределителей 7 и 8. Подается воздух в левую полость рабочей ступени 1. Падакидие части начинают перемещаться вниз.
Сигнал длительности перемещения падающих частей вниз и их удержание
в нижнем положении определяется задатчиком 27. Удар является конечной точкой отсчета.
На выходе блока 33 в момент, соответствующий удару появляется сигнал, устанавливающий в рабочее положение исполнительный элемент 34, с выхода последнего на вход блока 31 поступает сигнал нейтрализации сигнала запуска от кнопки 18 (кнопка 18 нажата).
Прекращается подача сигнала с вы-: хода блока 31. Обесточиваются электромагниты пневмораспределителей 7 и 8, устанавливается в нерабочее состояние блок 33. Падающие части возвращаются вверх. Повторного удара не происходит, хотя и нажата кнопка 18, так как исполнительный элемент 34 остается в рабочем состоянии
При снятии нах имного усилия с кнопки 18 подается сигнал на вход блока 46, сигнал с выхода которого устанавливает в нерабочее состояние исполнительный элемент 34. Схема подготовлена к повторному пуску.
При совместной работе молота и механизма ориентации поковки необходимо ключи эадатчиков 21 и 22 установить в соответствии с выбранными направлениями вращения и перемещения поковки. Соединяются со схемой блоки 37 и 39. В этом случае после установки в рабочее состояние исполнительного элемента 34 устанавливаются в рабочее состояние исполнительные механизмы 49, 53 и электроприводы 52 и 56, снимается сигнал электромагнитов пневмораспределктелей 7 и 8 (начинается подъем падающих частей поступает сигнал на вход блоков 37 и 39, с выходов последних сигнал поступает на вход исполнительных элементов 38 и 40. Прекращают рабо- ту электроприводы 52 и 56. Далее схема подготавливается к повторному пуску.
В. Работа в автоматическомрежиме без механизма ориентации поковки (органы пневмоуправления находятся в положении, показанном на чертеже/
Ключ задатчика 20 устанавливают в режиме Автомат, подключаются блок 33, исполнительный элемент 34, блок 45, блок 35, исполнительный элемент 36 (блок 35 и элемент 36 подключаются только в том случае, если ключи задатчиков 21 и 22 установлены в нейтральное положение ).
При одноразовом нажатии кнопки 18. .устанавливаются в рабочее состояние
60 блоки 31 и 45. Блок 45 своим выходом удерживает себя и блок 31 в рабочем состоянии. С блока 31 поступает сигнал на вход блока 33 и на вход блока 32, срабатывают электромагни65 ты пневмораспределителей 7 и 8. Перемесдается поршень рабочей ступени 1 - падающие части наносятудар. После определенного задатчиком 2 отсчета блок 33 устанавливает в рабочее состояние исполнительный механизм (элемент 34 ). С блока 34 на вход блока 31 поступает сигнал нейт рализации запуска, последний устанавливается в нерабочее состояние, снимается сигнал с блока 32, обесточиваются электромагниты пневмораспределителеп 7 и 8. Поршень рабочей ступени 1 возвращается в исходное положение (заполнена воздухом правая полость ступени 1) - падающие части перемещаются вверх. Сигнал с выхода исполнительного элемента 34 поступает на вход блока 35, после отсчета интервала, заданного задатчиком 28, равного времени перемещения падающих частей вверх, с выхода блока 35 на вход исполнительного элемента 36 поступает сигнал, устанавливающий блок 36 в рабочее состояние, последний воздействует на исполнительный элемент 34, устанавливая его в нерабочее состояние. В результате этого снимается сигнал с блока 35 и с исполнительного элемента 36. Так как исполнительный элемент 34 установлен в нерабочее состояние, снимается сигнал нейт рализации запуска-С блока 31, послед ний устанавливается вновь в рабочее состояние. С выхода блока 31 поступает сигнал на вход блока 32, сработают электромагниты пневмораспределителей 7 и 8. Вновь наносится удар. Удары наносятся до тех пор, пока включено устройство. Для его отключения доста точно нажать на кнопку 19. Устанавли ваются в нерабочее состояние блоки .31, 45 и 33. Г. Работа в автоматическом режиме с механизмом ориентации поковки (органы пневмоуправления находятся в положении, показанном на чертеже, ключ задатчика 20 устанавливают по режиму В I. Ключи задатчиков 21 и 22 устанавливают в соответствии с выбранными направлениями вращения и перемещения поковки. При этом отключаются блок 35 и исполнительный элемент 36 Далее в определенной последовательности. При поступлении сигнала запуска на вход блока 31 на его выходе появляется сигнал, поступающий на вход блока 33 и на вход блока 32. Наносит ся очередной удар с последующим вращением и перемещением поковки и т.д Для прекращения работы в данном режиме достаточно нажать на кнопку 19 Удар падающими частями происходит только тогда, когда полностью заканчивается последнее из двух движений поковки (либо вращение при ранее закончившемся перемещении поковки, либо перемещение при ранее закончившемся вращении). Д. Работа в автоматическом режиме с механизмом ориентации поковки с задержкой на удар (органы пневмоуправления находятся в положении, показанном на чертеже, ключи задатчиков 20, 21 и 22 устанавливают по режимам В и Г ). Переключатель 57 устанавливают в положение Задержка удара. При этом подключаются блок 43 и исполнительный элемент 44 (отключены блок 35 и элемент 36). Далее в последовательности режимов В и Л. Сигнал с выхода исполнительных элемантов 38 и 40 поступает на вход блока 43. После определенно-, го задатчиком 30 отсчета, равного величине задержки удара, сигнал с выхода блока 43 поступает на вход исполнительного элемента 44, последнир устанавливается в рабочее положение, разряжая при этом емкостные элементы блока 43 и снимая сигнал с входа исполнительного элемента 34. Далее система работает в последовательности режимов Л, В и Г. Для прекращения работы в данном режиме достаточно нажать кнопку 19. Е. Работа.в автоматическом режиме с мехг1ниэмом ориентации поковки с задержкой на вращение-перемещение (органы пневмоуправления находятся в положении, показанног на чертеже, ключи эадатчиков 20,21 и 22 устанавливают по режиму В ), переключатель 57 устанавливают в положение Без задержки удара). Переключатель 48 устанавливают в положение Задержка на вращение-перемещение. При этом подключаются блок 41 и исполнительный элемент 42 (отключены блок 35 и элемент 36). Далее в последовательности по режиму В. Одновременно с выхода исполнительного элемента 34 на вход блока 41 поступает сигнал, устанавливая блок 41 в рабочее состояние. После определенного зал1атчиком 29 отсчета, равного величине задержки на вращениеперемещение; сигнал с выхода блока 41 поступает на вход исполнительного элементг1 42, последний устанавливается в рабочее состояние, разряжая при этом емкостные элементы блока 41, устанавливая в рабочее состояние исполнительные механизмы 49 и 53. Включаются электроприводы 52 и 56 - происходит вращение и перемещение поковки. Одновременно сигналом с выхода исполнительного элемента 42 устанавливаются в рабочее состояние блоки 37 и 39. Далее система работает в последовательности по режиму
А и В. Для прекращения работы в данном режиме достаточно нажать на кноп ку 19.
; Прочие возможные режимы работы устройства.
Устройство обеспечивает работу в автоматическом режиме с механизмом ориентации поковки совместно с задержкой удара и с задержкой на вращение-перемещение. При этом переключатели 57 и 48 устанавливают в требуемое положение.
Устройство обеспечивает работу и в полуавтоматическом режиме. Задатчик 20 устанавливают в режим Полуавтомат. В этом случае работа осуществляется аналогично описанному в режимах В, Г и Е, однако кнопку запуска 18 следует держать в период работы устройства в нажатом состоянии. При этом блок 45 не подключен к устройству. Для прекращения работы достаточно снять нажимное усилие с кнопки 18.
При необходимости прижим поковки падающими частями осуществляется следующим образом.
Поковку, удерживаемую механизмом ориентации, заводят на нижний боек молота. Рукоятку пневмораспределителя 11 устанавливают из положения 1 в положение 2 - заполняется воздухом левая полость ступени 2 (правая полость соединяется с атмосферой ), при этом поршень Ступени 2 перемещает поршень ступени 1. На определенную высоту перемещается золотник молота. Расстояние перемещения золотника молота (определенное длиной перемещения поршня ступени 2 предусмотрено таким, чтобы прекратить подачу воздуха в нижнюю полость цилиндра молота и обеспечить выпуск воздуха из нее в том количестве, при котором падаиощие части переместятся (из верхнего положения на поковку без удара, при этом в верхнкяо полость цилиндра молота воздух не поступает (падакнцие части садятся на поковку своей массой ).
Далее рукоятку пневмораспределителя 11 устанавливают в положение 3.
в этом случае штоки фиксирующих цилиндров 9 и 10 перемещаются, нажимая сердечники электромагнитов пневмораспределителей 7 и 8. Последние устанавливаются в рабочее состояние. Заполняется левая полость рабочей ступени 1 через пневмораспределитель 7, а воздух из правой полости через пневмораспределитель 8 и дроссель 16 отводится в атмосферу.
0 Перемещается поршень рабочей ступени 1 (на полную длину хода поршня, перемещается золотник молота (в данный момент на полную высоту J. Заполняется воздухом верхняя полость ци5 линдра молота, при этом поковка прижата не только массой падающих частей, но и усилием, создаваемым давлением воздуха верхней полости цилиндра на поршень молота. Для снятия
0 прижимного усилия с поковки рукоятку пневмораспределителя 11 устанавливают из положения 3 в положение 1. Такой прижим поковк« обеспечивает полную безопасность в случае внезап5 ного отключения напряжения в момент, когда заготовка (поковка) зажата между бойками. ,
Установочные ступени 3 и 4 с управлением от пневмораспределителей 12 и 13 предназначены для ограничения хода поршня рабочей ступени 1 при включении молота на удар, в результате чего обеспечивается удар ослабленной энергии. -Для подъема падающих частей молота на заданную высоты предназначены ступени 5 и б с управлением от пневмораспределителей 14 и 15. Ослабление энаргии удара осуществляется за счет Зс1медленного 0 перемещения падающих частей при замедлении перемещения штока рабочей ступени 1 дросселем 16. Дроссель 17 служит для изменения скорости подъема падающих частей молота.
5
Эффективность использования преДлагаемого устройства обуславливается повышением надежности работы за счет более стабильного функционирований системы управления.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| НОСИМАЯ ЧАСТЬ ДЛЯ ОСУЩЕСТВЛЕНИЯ ОБМЕНА ИНФОРМАЦИЕЙ (ВАРИАНТЫ) | 2014 |
|
RU2752603C2 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
