Изобретение относится к обработке металлов давленнем, в частности к устройствам для автоматизации управления ковочным молотом. Известно пневмоэлектрическое устройство для управления ковочным молотом, содержащее золотник управления цнлищфрм , многоступенчатый цилиндр управления, состоя идай из рабочей и установочных ступвнёй, што которого соединен с золотником молота, основной и вспомогательный электромагнитные пневмораспределители рабочей ступени, с подключенными дросселями, датчики контроля положений золотника молота - исходного, ко нечного, на весу, ограничение, пульт управления и контрольные пластины датчиков положения золоишка 1. Недостатком извесгаого устройства является то, что оно обеспечивает управление лишь за счет индивидуального включения-выключения соответствующих коммутирующих органов управления, позтому возможности устройства существенно ограничены и быстродействие его невелико. Цель изобретения - повышение производительности молота и расширение технологических возможностей устройства. Поставленная цель достигается тем, что оно снабжено функциональными блоками приема команд, автоматического режима, единичного и многократного реверса, исходной готовности, ориентации на весу и ограничение, прижима, а также генератором частоты, задатчиком режимов, преобразователями сигналов, датчиков контроля положений золотника молота, тиристорными преобразователями злектромагнитов пневмораспределителей, причем выход блока приема команд соединен с генератором частоты, с блоками автоматического режима и многократного реверса, а также с тнристорным преобразователел злектромагнита основного пневмораспределителя, выход блока автоматического режима соединен с датчиком контроля конечного положения золотника молота, с блоками ориентации на весу и ограниченее, а также через задатчик режимов с блоком приема команд, выход блока единичного реверса соединен с датчиком контроля положений золотника молота - исходного и на весу, а также с блоком приема команд, выход блока многократного реверса соединен с датчиками контроля положений золотника молота - исходного и на весу, а также с блоком единичного реверса, выход блока исходной готовности соединен с блоками единичного и многократного реверса, а также . с блоком автоматического режима, выход блока ориентации на весу соединен с датчикми Контроля положений золотника молота - исходного и на весу, а также с тиристорным преобразователем электромагнита вспомогательного пневмораспределителя, выход блока ориентации ограничение соединен с датчиками контроля положений золотника молота - конечного и ограничение, выход блока прижима - со всеми датчиками контроля положений золотника молота, с блоками единичного реверса и автоматического режима, с тиристорным преобразователем электромагнита основного пневмораспределителя, а также с генератором частоты, выход преобразователя сигнала датчика контроля исходного пЬложения золотника молота соединен с блоком многократного реверса, через выход задатчика режимов, и с блоком исходной готовности, выход преобразователя сигнала датчика контроля конечного положения золотника молота соединен с блоками прижима и ед1шнчного реверса, выход преобразователя сигнала датчика контроля золотника -молота в положении на весу соединен с блоками ориентащш . на весу исходной готовности, а также с блоком многократного ревер.са через задатчик режимов, выход преобразователя сигнала датчика, контроля золотника молота в положении ограничение соединен с блоками прижима и единтного реверса.
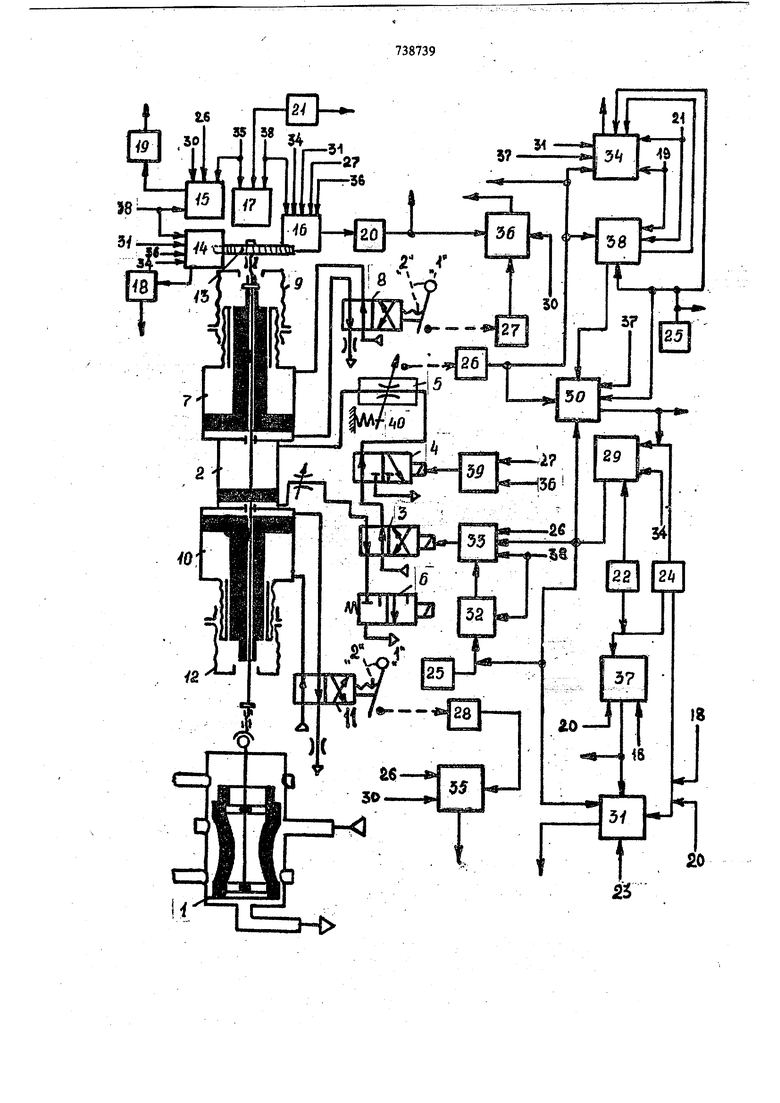
На чертеже изображена схема пневмоэлектрического устройства.
Устройство состоит из золотника I; цилшадра управления, содержащего рабочую стулет 2 управляемую основным пневмораспределителем 3 и вспомогательным пневмораспределителем 4 с дросселем 5 (рукоятка дросселя подпружинена в конце хода, при мшшмалыю зауженном отверстии); пневмораспределителя б (ycTaiiOBленного в выходной цепи, предназначенного для предотвращения подъема, падающих частей молота в момент прижима заготовки при снятии напряжения с системы зттравления); цилиндр управления содержит установочную ступень 7, предназначенную для установки падающих частей молота в положение на весу и управляемую пневмораспределителем 8, установочная ступень 7 снабжена поршневым ограничителем 9, кроме того цилиндр управления содержит установочную ступень 10, предназначенную для ограничения хода падающих частей
молота при движении на удар и управляемую пневмораспределителем 11, установочная ступень 10 снабжена поршневым ограничителем 12. На штоке цилиндра }Т7равления укреплены 5 контрольные пластины 13. В вертикальных плоскостях, параллельно оси штока цилиндра управления, установлены датчики контроля конечных и npOMe)kyTO4Hbix положений ( с возможностью регулирования в вертикальных
10 плоскостях по отношению к величине перемещения соответствующей контрольной пласти-, ны): датчик 14 контроля исходного положе1гая золотника молота, датчик 15 контроля противоположного положения золотника, датчик 16
15 контроля золотника молота, в положении на весу, датчик 17 контроля золотника молота в положении ограничение. Для преобразования сигнала датчиков служат преобразователи 18-21. Для зшравления устройством служит пульт
0 управления,на котором размещены пусковая кнопка 22, кнопка сброса 23, задатчик 24 режимов, задатчик 25 частоты ударов (с вы1слючателем).
На пульте установлена рукоятка дросселя 5,
5 предназначенная как для регулировки силы удара (при выхлопе воздуха из верхней полости рабочей ступени 2), так и для воздействия на конечный выключатель 26, с целью воздействия последнего на систему управления. На
0 пульт также выведены рукоятка пневмораспределителя 8, выполненная с возможностью воздействия на конечный выключатель 27, и рукоятка пневмораспределителя 11, выполненная с возможностью воздействия на конечный
5 выключатель 28.
Для приема команд, выдаваемых с пульта управления кнопкой 22 служит блок 29, выход которого соединен со входами блока 30 автоматического режима, блока 31 многократного
0 реверса (предназначенного для обеспечения работы в автоматическом режиме и в режиме серия ударов), генератором 32 частоты (предназначенном- для обеспечения ударов при шлихтовке), тиристорного преобразователя 33, пред5 назначенного для управления электромагнитом основного пневмораспределителя 3).
Устройство также снабжено блоком 34 единичного реверса (предназначенного- для обеспечения возврата падшощих -частей молота в
Q исходное положение во всех режимах работы молота), выход которого соединен со входами датчиков 14 и 16, а также со входом блока 29. Вь1ход блока 30 соединен со входами блока j35 ориентации ограничение (ориентация схемы на работу при подготов се падаюших частей молота к работе в режиме ограничения хода на удар) и блока 36. ориентации на весу), (ориентация схемы на работу из положения падающих частей молота на весу,
а также через первый выход эадатчика 24 режимов со входом блока 29. Кроме того, устройство снабжено блоком 37 исходной готовности (предназначенного для приведения системы в исходное состояние после отработки цикла, при работе в режимах нанесения одиночных ударов и серии ударов) и блоком 36 прижима (обеспечивающего прижим заготовки и нанесение шлихговочных ударов). Тирйсторный преобразователь 39 предназначен для управления злектромагнитом вспомогательного пневмораспределителя 4. Пружина 40 служит для снятия прижимного усилия с конечного выключателя 26, пЬсле осуществления прижима заготовки падающими частями молота.
Выхлоп воздуха из верхней полости цилиндра рабочей стзттени 2 соответствует ходу падающих частей молота на удар.
Устройство работает следующим образомИсходное положение элементов устройства соответствует указанному на чертеже, при подаче напряжения на систему срабатывает злектромагнит пневмораспределителя 6.
Для нанесения одиночных УДаров при максимальном ходе падающих частей молота необходимо установить ключ задатчика 24 против режима одиночный удар, что соответствует подключению к схеме входа блока 37 и отключению от схемы блока 31. При выдаче команды (нажатии и удержании в нажатом состоянии, кнопки 22) подается сигнал на вход блока 29. При отсутствии сигнала с блока 34 на выходе блока 29 появится Сигнал, поступающий на вход блока 30, а также на вход тиристорного преобразователя 33 (сигналы, поступающие с выхода одного блока, но не оказывающие влияния на изменение состояния другого блока не будут упоминаться в описании работы устройства). При отсутствии сигнала с блока 38, подаваемого на вход тирис-. торного преобразователя 33, на выходе последнего появляется сигнал, обеспечивающий включение электромагнита пневмораспределителя 3. Заполняется воздухом нижняя полость рабочей ступени 2, воздух из верхней полости (через пневмораспределитель 4, находящийся в нерабочем состоянии, и пневмораспределители 3 и 6) отводится в атмосферу, переместится золотник 1 и падающие части молота (не показаны на чертеже) наносят удар по заготовке. Одновреметю, при отсутствий сигналов на входе блока 30 с блоков 38 и 37, а также при разомкнутых контактах конечного выключателя 26 на выходе блока 30 появится сигнал. В результате этого датчик 15 подключается к системе (однако, на его выходе сигнал отсутствует). При входе соответствующей контрольной пластины 13 в зазор датчика 15 появится сигнал на его выходе, поступающий
на вход преобразователя 19, и далее на вход блока 34, устанавливая последний в рабочее состояние. Появившийся на выходе блока 34 сигнал поступает на вход датчика 14, подключая его к системе, и на вход блока 29, устанавливая последний в нерабочее состояние. Обесточивается электромагнит пневмораспределителя 3. Порщень ступени 2 возвращается в исходное положение, перемещая золотник 1 вниз и падающие части молота возвратятся в верхнее исходное положение. При входе контрольной пластины 13 в зазор датчика 14 нэ выходе его преобразователя 18 появится сигнал, поступающий на вход блока 37 (однако последний останется в нерабочем состоянии в связи с отсутствием сигнала на его входе от размыкающего контакта кнопки 22, так как оператор удерживает кнопку нажатой).
В связи с тем, что с блока 34 (блок 34 удерживается в рабочем состоянии по линии собственной обратной связи) на вход блока 29 поступает сигнал запрета, повторного удара не произойдет (сколько бы оператор ни держал нажатой кнопку 22). Для нанесения следующего одиночного удара необходимо снять нажимное усилие с кнопки 22. При этом на вход блока 37 подается сигнал (на вход этого же блока подается сигнал с преобразователя 18), в результате этого с его выхода поступает сигнал на вход блока 30, нейтрализуя сигнал обратной связи, устанавлнваюидай блок 30 в нерабочее состояние, этот же сигнал устанавливает в нерабочее состояние блок 34, снимающий сигнал запрета с блока 29. Одновременно обесточатся датчики 14 и 15, в результате этого блок 37 установится в нерабочее состояние. Схема подготовлена к повторному включению, для чего дост;аточно нажать кнопку 22.
Для нанесения серии ударов при максимальном ходе падающих частей молота достаточно повернуть ключ задатчика 24 в положение серия ударов (при этом к системе подключается блок 31) и выдать команду включения на блок 29. Изменение состояния блоков 29, 30, 33 и 34 и порядок подключения датчиков 14 и 15 будет происходить аналогично описанному, однако после нанесения первого удара, при возвращении золотника 1 в нижнее исходное положение сигкал от преобразователя 18 поступает на вход блока 31, а так как блок 34 будет удерживать блок 29 в нерабочем состоянии сигнал с выхода блока 29 на входе блока 31 будет отсутствовать, в этой связи выход блока 31 будет воздействовать на вход блока 34 (устанавливая его в нерабочее состояние) и на. вход датчика 14. При этом снимается сигнал запрета, поступающий с выхода блока 34 на вход блока 29, а так как блок 34 установится в нерабочее состояние, воздействне его сигнала на подключение датчика 14 прекратится, подключение же датчика 14 к системе будет осуществляться сигналом с блока 31. Вновь блок 29 устанавливается в рабочее состояние (сработает электромагнит пневмораспределителя 3, наносится следующий удар по заготовке), сигнал с блока 29 устанавливает блок 31 в нерабочее состояние. В момент, после нанесения удара, когда падающие части возвратятся в верхнее полбйсенйе,11ластина 13 вновь войдет в зазор датчика 14, сигнал с выхода преобразователя 18 установит блок 31 в рабочее состояние и т.д. Удары будут наносится до тех пор, пока будет нажата кнопка 22. Установка системы в исходное состояние осуществляется блоком 37, как Описано.
V Для работы устройства в автоматическом режиме при максимальном ходе падающих частей молота достаточно повернуть ключ задатчика 24 в положение автоматический режим (при этом от системы отключается блок 37, а свободный вход блока 29 подключается к выходу блока 30) и подать начальный импульс (кнопкой 22) на вход блока 29. Дальнейшая работа будет происходить аналогично описанному, однако установка блока 29 в рабочее состояние будет осуществляться сигналом с
выхода блока 30. Для прекращения ударов, в данном режиме достаточно нажать кнопку
сброс 23.
Для установки падающих частей молота в положение на весу достаточно рукоятку пневмораспределителя g установить в положение 2. Порщень вдлиндра установочной ступени 7 нач1шает перемещаться вверх, перемещается (через шток) и порщень цилиндра рабочей ступени 2 и падающие части молота начинают перемещаться вниз (к среднему положению на весу). Одновременно с установкой рукоятки пневмораспределителя 8 в положение 2, воздействующей на конечный выключатель 27, к системе, контактами выкйючателя 27, подклточает:ся дагшк 16, а также подается сигнал на вход тиристорного преобразователя 39, сработает электромагнит пневмораспределителя 4 и воздух из верхней полости цилиндра рабочей ступени 2 отводится через пневмораспределитель 4 в атмосферу, а магистраль входа воздуха -р верхнюю полость перекры вается. Таким образом, поршень ступени 7 легко перемещает поршень ступени 2. К,ак только падающие части молота установятся в положение на весу, хвостовик поршня установочной ступени 7 упрется в поршневой граиичнтель 9, одна из контрольных пластин 13 войдет в зазор датчика 16. Сигнал с преобразователя 20, поступающий на вход блока 36, отключает от системы датчик 16, снимается сигнал с тиристорного преобразователя 39 и обесточивается электромагнит пневмораспределителя 4. Воздух лновь заполнит верхнюю полость цилиндра рабочей ступени 2. Устройство подготовлено к работе из положения падающих частей молота на весу.
Работа устройства из положения падающих частей молота на весу, нанесение одиночных ударов и серии ударов осуществляется аналогично описанному выше, однако в работе будут принимать участие только датчики 15 и 16. Причем отсутствие сигнала с преобразователя 20, подаваемого на вход блока 36, а также наличие сигнала нейтрализации с блока 30 не окажут влияния на блок 36, так как он удерживается а рабочем состоянии за счет подачи сигнала с конечного выключателя 27 и собственной внутренней обратной связи. Поэтому блок 36 через свой выход будет удержватй отключенным датчик 6. В момент нанесения ударов д атчик 16 будет подключаться к системе только при наличии сигналов с блока 34, после нанесения удара (золотник 1 в верхнем положении) и в момент установки блоком 31 блока 34 в нерабочее состояние кратковременньтм импульсом с блока 31 (золотник 1 в нижнем положении). Для установки падающих частей молота в верхнее исходное положение, из положения на весу, необходимо возвратить рукоятку пневмораспределителя8 в положение 1, при этом размыкаются контакты выключателя 27/блок 36 устанавливается в нерабочее состояние, снимается воздействие блока 36 на датчик 16, а датчик отключается от системы контактом выключателя. 27. - i
Для установки падающих частей молота в положение ограничение достаточно рукоятку пневмораспределителя 11 установить в положение 2. Поршень установочной ступени 10 переместится вниз до упора в поршневой ограничитель 12, установленнь й на заданное ограничение. Одновременно замыкается контакт конечного выключателя 28. На вход блока 35 подается сигнал, однако блок 35 останется в нерабочем состоянии, так как будет отсутствовать сигнал с блока 30 (сигнал с блока 30 появится в момент включения системы на
удар),- ,
Работа устройства в положении ограничения хода падающих частей молота на удар ограничение, нанесение одиночных ударов и серии ударов аналогично описанному выще, - однако в работе будут принимать участие только датчики 14 и 17. При этом подключение датчика 17 к системе осуществляется блоком 35 (только при нанесении удара).
Устаншка падающих частей молота в положение на весу и ограничение осуществляется аналогично описанному в пунктах 4 и 6, в любой последовательности. Нанесение одиночных ударов, серии ударов и работа в автоматическом режиме осуществляется аналогично описанному выше, - однако в работе будут принимать участие только датчики 16 и 17.
Во всех вышеперечисленных случаях работы устройства скорость перемещения падающих частей молота, соответственно и сила удара регулируются дросселем 5.
Для прижима заготовки падающими частями молота к нижнему бойку достаточно установит рукоятку дросселя 5 в положение, при котором рукоятка воздействует на конечный выключатель 26. При этом рукоятка входит в контакт с достаточно тугой пружиной 40 не доходя 2-3 мм до штифта конечного выключателя 26, поэтому необходимо приложить определенное усилие для преодолевания усилия пружины 40. Такое положение рукоятки
дросселя 5 соответствует минимальному дросселирующему отверстию при котором происходит выхлоп из верхней полости цилиндра рабочей ступени 2, что и является причиной медленного сползания падающих частей молота. В момент замыкания контактов конечного выключателя 26 подается сигнал на тиристорный преобразователь 33. Сработает электромагнит пневмораспределителя 3. BOSZQTC из верхней полости через дроссель 5, выхлопнун) часть пневмораспределителя 4 (последний находится в нерабочем состоянии), выхлоп пневмораспределителя 3 и выхлопную часть пневмораспределителя 6 (последний всегда . находится в рабочем положении) медленно отводится в атмосферу. Золотнцк 1 медленно перемещается вверх и падающие частя Молота медленно перемещаются вниз и прижимают заготовку к нижнему бойку. Пластина 13 входит в зазор датчика 15 (при достижении золотииком 1 крайнего верхнего положения), который, в зтот момент, подключен к системе конечным выключателем 26. Сигнал с преобразователя 19 поступает на вход блока 38. Наличие сигнала с блока 38 на входах блоков 30 и 34 удерживает оба блока в нерабочем состоянии (даже при выдаче команды кнопкой 22), а датчики 14-17, оказываются отключенными от системы. После этого рукоятку дросселя 5 можно отпустить, злектромагнит пневмораспределителя 3 останется под Напряжением, так как тиристорный преобразователь 33 будет удерживаться в рабочем состоянии сигналом поступающим с блока 38.
Для снятия прижимного усилия с заготовки достаточно вьщать команду сброс кнопкой 23.
Для нанесения шлихтовочных ударов необходимо выполнить прижим заготовки, описанный выше, подключить (эадатчиком 25) к системе генератор 32 и (этим же) задатчиком 25 установить требуемую частоту щлихтовочиых ударов. Начало шлихтовочных ударов осуществляется нажатием кнопки 22. С блока 29 подается сигнал на второй вход генератора 32, так как на первый его вход поступает сигнал с блока 38 на выходе генератора 32 появляются импульсы, воздействующие на вход тиристорного преобразователя 33, в результате этого электромагнит пневмораспределителя 3 будет периодически отключаться (и включаться с интервалами равными .длительности импульсов выдаваемого генератором 32. С частотой включения и выключения пневмораспределителя 3 будет перемещаться (в верхней части) золотник 1 и падающиечасти молота будут наносить шлихтовочные удары по заготовке. Для прекращения шлихтовочных ударов достаточно снять нажимное усилие с кнопки 22, однако падающие части молота будут удерживать заготовку прижатой.
В случае мгновенного исчезновения электроэнергии, в момент удержания заготовки падающикт частями молота (например, в цеховой сети) обесточится вся система управления, обесточатся и электромагниты пневмораспределителей 3 и 6. При этом выхлоп из нижней полости цилиндра рабочей ступени 2 окажется запертым пневмораспредели1елем 6, что и исключит подъем падающих частей молота. (Самовключение электромагнита пневмораспределителя 6, как и всей системы, при появлении злектроэнергии - невозможно).
Формула изобретения
Пневмоэлектричёское устройство для управления ковочным молотом, содержащее золотник управления силовым Щ1}шндром молота, мнбгоступенчатый пилиндр управления, состоящий из рабочей и установочных ступеней, шток которого соединен с золотником молота, основной и вспомогательный электромагнитные пневмораспредепители рабочей ступени, с подключенными дросселями, датчики контроля положений золотника молота-исходного, конечного, на весу, ограничение и пульт управления, отличающееся тем, что, с целью повышения производительности молота и расширения технологических возможностей устройства, оноснабжено функциональными блоками приема команд, автоматического режима, единичного и многократного реверса, исходаой готовности, ориентации на весу и ограничение, прижима, а также генератором частота, задатчиком режимов, преобразователями сигналов/датчиков контроля положений 117387 золотника молота, тиристорными преобразоватепями электромагнитов пневмораспределителей, причем выход блока приема команд соединен с генератором частоты, с блоками автоматического режима и многократного реверса, 5 а также с тирнсторным преобразователем электромаатшта основного пневмОраспределителя, выход блока автоматического резкима соединен с датчиком контроля конечного положения золотника молота, с блоками ориента- О ции на весу и ограничение, а также через задатчик режимов с блоко гфйемакоманд, выход блока единичного реверса соединен с датчиком контроля положений золотника молота-нсходного и на весу, а также с блоком ,15 приема команд, выход блока многократного реверса соединен с датчикамиконтроля положещй золотника молота - исходного и на весу, а. также с блоком единичного реверса, выход блока исходной готовности соединен 20 с блоками единичного и многократиого реверса, а также с блоком автоматического режима, выход блока ориентации на весу соединен с датчиками контроля положений золотника молота - исходного и на весу, а также25 с тиристорным преобразователем электромагнита вспомогательного пневмораспределителя, выход блока ориентации ограничение соединен с датчиками контроля положений золотника молоти - конечного и ограничение, выход блока прижима соединен со всеми Датчиками контроля прлржений золотника молота, с блоками единичного реверса и автоматического режима, с тиристорным преобразователем электромагнита основного пневмораспределителя, а также с генератором частоты, выход преобразователя сигнала датчика контроля исходарго положения золотника молота соединён с блоком многократного реверса, через выход задатчика режимов, и с блоком исходной готовности, выход преобразователя сигнала датчика контррля конечного положения золотника молота соединен с блоками прижима и единичного реверса, выход преобразователя сигнала датчика контроля золотника мрлота в положении на весу соединен с блоками ориентации на весу, исходной готовности, а также с блоком многократного реверса через задатчик режимов, выход преобразователя сигнала датчика контроля золотника молота в положении ограничение соединен с блоками прижима и единичного реверса. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР пР заявке цо 2445492/25-27, кл. В 21 J 7/46, 1977.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1981 |
|
SU1087242A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU651881A1 |
| Система управления гидровинтовымпРЕСС-МОлОТОМ | 1976 |
|
SU795968A2 |
| Система управления штамповочным молотом | 1982 |
|
SU1034823A1 |
| УРОВНЕМЕР ПРЕЗИЦИОННЫЙ ВЗРЫВОБЕЗОПАСНЫЙ | 2002 |
|
RU2249184C2 |
| ЭЛЕКТРОМАГНИТНЫЙ МОЛОТ | 1988 |
|
SU1584480A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ШЕРОХОВКИ ПОВЕРХНОСТИ ЛИСТА | 1990 |
|
RU2009833C1 |
| Электромагнитный привод ударного действия | 1990 |
|
SU1745920A1 |