Изобретение относится к подъемно-транспортному оборудованию, в частности к шаговым конвейерам для перемещения штучных грузов с одной рабочей позиции на другую. Известен шаговый конвейер, включающий неподвижную раму с копирами и подвижную раму, соединенную с приводным механизмом, причем он снабжен подпружиненной тележкой, расположенной на.копирах и имеющей горизонталь ную и наклонные поверхности, с которыми взаимодействует подвижная рама 1. Недостаток указанного конвейера заключается в том, что из-за наличия подпружиненной тележки усложняется его конструкция. Наиболее близким решением к предлагаемому является шаговый конвейер, содержащий неподвижную раму, опорную платформу с копирами, подвижный стол с грузовыми роликами и привод 2 . Однако надежность указанного конвейера невелика особенно в производствах с тяжелыми условиями работы и при больших массах подвижного стол и перемещаемых грузов, так как при его работе неизбежны частые ударные нагрузки, которые будут возникать при опускании стола ввиду того, что выемки ходовой части имеют стенки с вертикальными участками, а также из-за неустойчивого положения стержней в выемках при изменении направления хода стола. Ударные нагрузки вызывают повышенный износ шарнирных соединений, что может привести к несогласованности движений механизмов конвейера, перекосам стола и другим неисправностям. Возможны также заедания в шарнирах стержней, что может стать причиной захвата грузов столом при обратном ходе или, наоборот, прохода стола ниже грузов при рабочем ходе. Целью изобретения .является повышение надежности конвейера. . Указанная цель достигается тем, что подвижный стол снабжен опорными рапикс1ми, а грузовые ролики жестко установлены на нем с возможностью поперечного смещения, при этом копиры выполнены из направляющих рабочего хода и направляющих холостого хода, каждая из которых в конце хода имеет кулачок для смещения грузового ролика с одной направляющей на другую.
Причем иаправлятотпие рабочего и холостого ходов выполнены ступенчато относительно друг друга для предотвраиения взаимодействия грузовых роликов с налравляющей холостого хода при огтуекании подвижного стола.
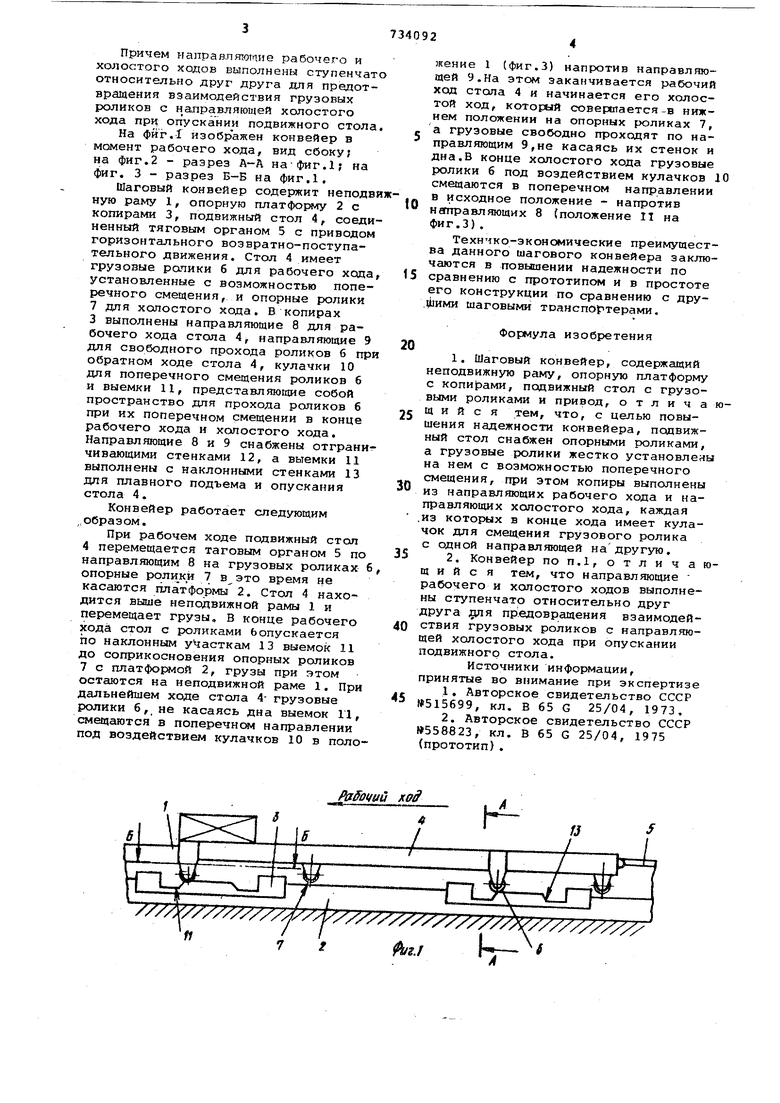
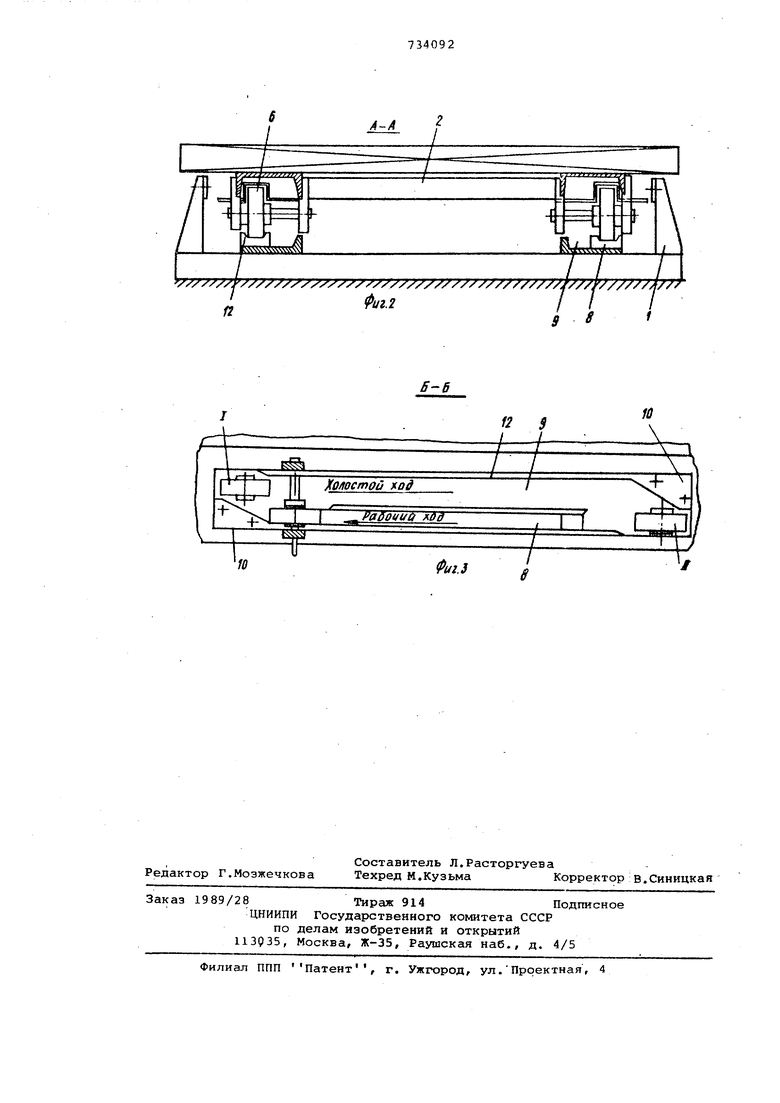
На фиг,Г изображен конвейер в момент рабочего хода, вид сбоку; на фиг.2 - разрез А-А нафиг.; на фиг. 3 - разрез Б-Б на фиг.1.
Шаговый конвейер содержит неподвиную раму 1, опорную платформу 2 с копирами 3, подвижный стол 4, соединенный тяговым органом 5 с приводом горизонтального возвратно-поступательного движения. Стол 4 имеет грузовые ролики б для рабочего хода, установленные с возможностью поперечного смещения, и опорные ролики 7 для холостого хода. В копирах
3выполнены направляющие 8 для рабочего хода стола 4, направляющие 9 для свободного прохода роликов б при обратном ходе стола 4, кулачки 10 для поперечного смещения роликов 6
и выемки 11, представляющие собой пространство для прохода роликов 6 при их поперечном смещении в конце рабочего хода и холостого хода. Направляющие 8 и 9 снабжены отгранигчивающими стенками 12, а выемки 11 выполнены с наклонными стенками 13 для плавного подъема и опускания стола 4.
Конвейер работает следующим „образом.
При рабочем ходе подвижный стоп
4перемещается таговым органом 5 по направляющим 8 на грузовых роликах опорные ролики 7 в это время не касаются платформы 2. Стол 4 находится выше неподвижной рамы 1 и перемещает грузы, В конце рабочего хода стол с роликами 6опускается
по наклонным участкам 13 выемок 11 до соприкосновения опорных роликов 7 с платформой 2, грузы при этом остаются на неподвижной раме 1. При дальнейшем ходе стола 4- грузовые ролики б,, не касаясь дна выемок 11, смещаются в поперечнсм направлении под воздействием кулачков 10 в положение 1 (фиг.З) напротив направляющей 9.На этом заканчивается рабочий хоя стола 4 и начинается его холостой ход, который совершается-в нижнем положении на опорных роликах 7, а грузовые свободно проходят по направляющим 9,не касаясь их стенок и дна.В конце холостого хода грузовые ролики б под воздействием кулачков Ю смещаются в поперечном направлении в исходное положение - напротив натравляющих 8 (положение II на фиг.З).
Технико-экономические преимущества данного шагового конвейера заключаются в повышении надежности по
5 сравнению с прототипом и в простоте его конструкции по сравнению с дру.(41ими шаговыми транспортерами.
Формула изобретения
0
1.Шаговый конвейер, содержащий неподвижную раму, опорную платформу с копирами, подвижный стол с грузовыми роликами и привод, отличающийся тем, что, с целью повы5шения надежности конвейера, подвижный стол снабжен опорными роликами,
а грузовые ролики жестко установлены на нем с возможностью поперечного смещения, при этом копиры выполнены
0 из направляющих рабочего хода и направляющих холостого хода, каждая .из которых в конце хода имеет кулачок для смещения грузового ролика с одной направляющей на другую.
5
2.Конвейер поп.1, отличающий с я тем, что направляющие рабочего и холостого ходов выполнены ступенчато относительно друг друга я предовращения взаимодействия грузовых роликов с направляю0щей холостого хода при опускании подвижного стола.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
5 №515699, кл. В 65 G 25/04, 1973.
2.Авторское свидетельство СССР №558823, кл. В 65 G 25/04, 1975 (прототип).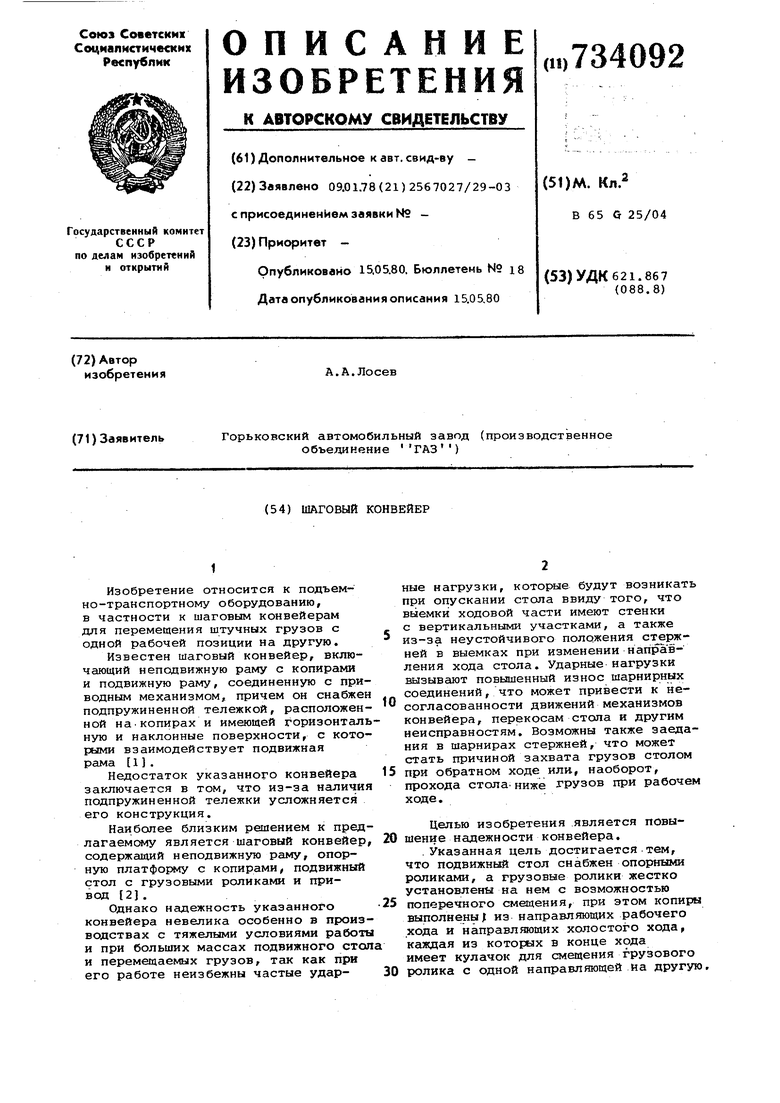
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| Шаговый конвейер | 1980 |
|
SU912606A1 |
| Конвейер для транспортирования штучных грузов | 1990 |
|
SU1795951A3 |
| Шаговый конвейер | 1975 |
|
SU558823A1 |
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Шаговый конвейер | 1988 |
|
SU1565790A1 |
| Шагающий конвейер | 1985 |
|
SU1240696A1 |
/ 7 t ffowu fp/ J) brW
fa
12 $
I /
Фиг. 5
