Изобретение относится к подъемно-транспортному оборудованию и может быть использовано в транспортно-накопительных системах для перемещения и накопления штучных грузов.
Цель изобретения - повышение надежности работы конвейера.
На фиг.1 показан шагаюший конвейер, исходное положение; на фиг.2 - то же, при выполнении рабочего хода; на фиг.З - то же,
тельно копиров 5, а транспортируемый груз опирается на неподвижную раму 1 (фиг.1 и 5).
Конвейер работает следующим образом.
Приводные механизмы 9 смещают оси 7 с закрепленными на них грузовыми роликами 6 в поперечном направлении и фиксируют их напротив копиров 5.
Подвижная рама 3 перемещается вправо, копиры 5 взаимодействуют с грузовыми ров конце рабочего хода; на фиг.4 - то же, Q ликами 6, подвижная рама 3 при этом
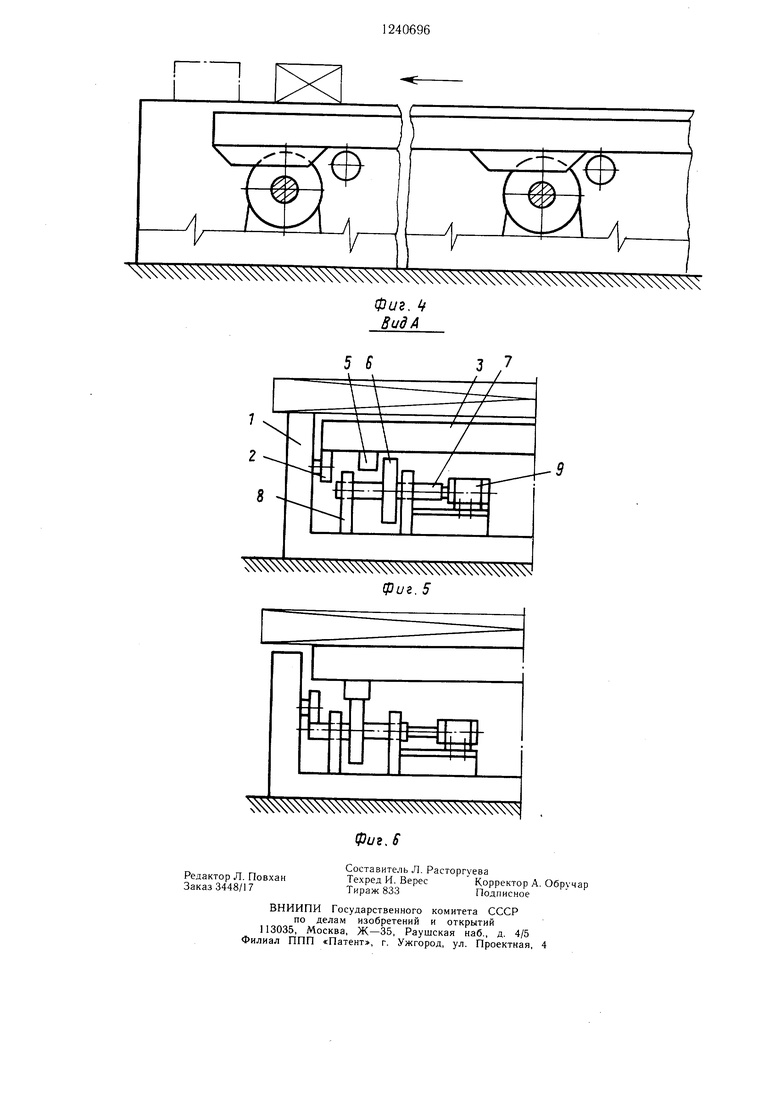
при холостом ходе; на фиг.5 - вид А на фиг.1; на фиг.6 - вид Б на фиг.2. Шагающий конвейер содержит неподвижную раму 1 с .опорными роликами 2, на которых установлена подвижная рама 3, свяподнимается, подхватывает и пере.мещает груз (фиг.2 и 6). Таким образом осуществляется рабочий ход подвижной рамы.
В конце рабочего хода копиры 5 выхозанная тягой 4 с приводом продольного воз- 15 дят из взаимодействия с грузовыми роликавратно-поступательного перемещения (не показан).
Подвижная рама 3 снабжена копирами 5, взаимодействующими с щарнирно закрепленными грузовыми роликами 6 на осях 7. Оси 7 установлены с возможностью поперечного смещения на жестко закрепленных на неподвижной раме I опорах 8 и снабжены приводными механизмами 9.
Приводные механизмы 9 выполнены в ви20
ми 6, подвижная рама 3 опускается и устанавливает транспортируемый груз на неподвижную раму 1 со смещением на шаг Т по отношению к исходному положению (фиг.З).
Приводные механизмы 9 с.мещают оси 7 с закрепленными на них грузовыми роликами 6 в поперечном направлении и фиксируют их в положении, изображенном на фиг.5.
При холостом ходе подвижная рама 3 перемещается по опорным роликам 2 влево
де силовых цилиндров. Силовые цилиндры 25 (фиг.4). При этом копиры 5 не взаимомогут быть заменены электровинтовыми тол-действуют с грузовыми роликами 6 и подкателями и электромагнитами.вижная рама 3, не задевая транспортируеВ исходном положении конвейера под-мого груза, устанавливается в исходное повижная рама 3 опирается на опорные ро-ложение, показанное на фиг.1. лики 2, оси 7 с грузовыми роликами 6 сме-Далее цикл работы конвейера повторящены в поперечном направлении относи-ется.
тельно копиров 5, а транспортируемый груз опирается на неподвижную раму 1 (фиг.1 и 5).
Конвейер работает следующим образом.
Приводные механизмы 9 смещают оси 7 с закрепленными на них грузовыми роликами 6 в поперечном направлении и фиксируют их напротив копиров 5.
Подвижная рама 3 перемещается вправо, копиры 5 взаимодействуют с грузовыми роликами 6, подвижная рама 3 при этом
поднимается, подхватывает и пере.мещает груз (фиг.2 и 6). Таким образом осуществляется рабочий ход подвижной рамы.
В конце рабочего хода копиры 5 выходят из взаимодействия с грузовыми ролика
ми 6, подвижная рама 3 опускается и устанавливает транспортируемый груз на неподвижную раму 1 со смещением на шаг Т по отношению к исходному положению (фиг.З).
Приводные механизмы 9 с.мещают оси 7 с закрепленными на них грузовыми роликами 6 в поперечном направлении и фиксируют их в положении, изображенном на фиг.5.
При холостом ходе подвижная рама 3 перемещается по опорным роликам 2 влево
(руг, 2
f $$ $$ S$$$$$$$$$$$$Si$$
Фиг.З
Фи. 4 В ид A
5 6
фиг. 5
N5; Фиг.б
Редактор Л. Повхан Заказ 3448/17
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
Составитель Л. Расторгуева
Техред И. ВересКорректор А. Обручар
Тираж 833Подписное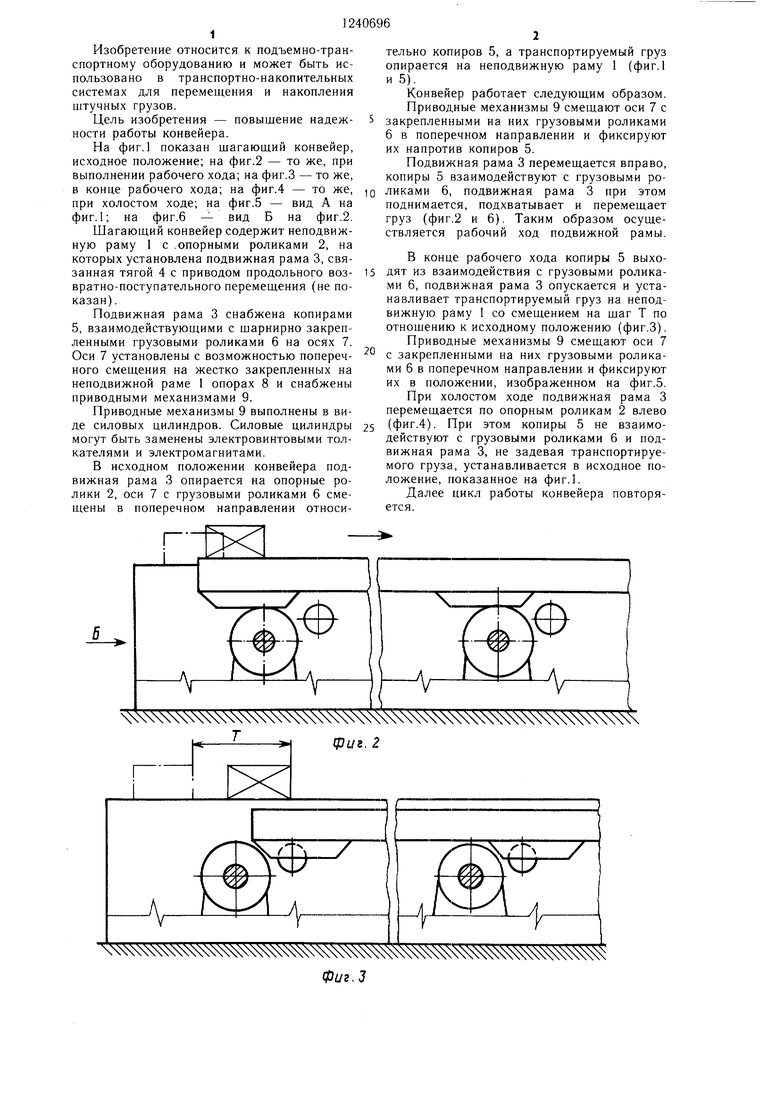
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1988 |
|
SU1525089A1 |
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1979 |
|
SU846437A1 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Шаговый конвейер | 1983 |
|
SU1159844A1 |
| Шаговый конвейер | 1980 |
|
SU882863A1 |
| УСТРОЙСТВО ДЛЯ РАЗГРУЗКИ ГРАВИТАЦИОННЫ?СТЕЛЛАЖЕЙ^^..v-.-^jIJ П г ЬФ1Д ШШпЕГш! | 1970 |
|
SU435995A1 |
| Шаговый конвейер | 1988 |
|
SU1565790A1 |

| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
