(54) УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ШТУЧНЫХ ГРУЗОВ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ступенчатого перемещения штучных грузов | 1982 |
|
SU1089042A1 |
| ПЕРЕГРУЖАТЕЛЬ ТАРНО-ШТУЧНЫХ ГРУЗОВ | 2000 |
|
RU2203213C2 |
| Устройство для перегрузки штучных грузов | 1980 |
|
SU889604A1 |
| ВСЕСОЮЗНАЯ ПАТЕНТйО-ТЕХпННЕСКА!!БИБЛИОТЕКА | 1971 |
|
SU306062A1 |
| Устройство для разборки пакета штучных грузов | 1985 |
|
SU1350089A1 |
| Устройство для перегрузки штучных грузов | 1983 |
|
SU1137068A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1768480A1 |
| Устройство для перегрузки пакетированных грузов | 1988 |
|
SU1643340A1 |
| АВТОМАТ ДЛЯ МОНТАЖА ТЕЛА НАКАЛА ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ | 1972 |
|
SU343322A1 |
| Загрузочное устройство | 1984 |
|
SU1222604A1 |
I
Изобретение относится к подъемно-тран-. спортным устройствам и может быть использовано для межоперационного транспортирования Штучных грузов, а также для загрузки и разгрузки различного те нологического и подъемно-транспортного оборудования в торговле, в промышленности, на елезнодорожном транспорте и в других отраслях народного хозяйства.
Известно устройство для перегрузки штучных грузов, содержашее неподвижное основание, в верхней части которого смонтирован конвейер, а на его противоположных боковых сторонах - платформы для груза, установленные с возможностью вертикального перемешения вдоль боковых сторон посредством привода, кинематически связанного с приводом конвейера 1.
Известное устройство не обеспечивает достаточно высокой производительности, поскольку необходимо дополнительное устройство, которое перегружало бы груз с боковых платформ на колвейер.
Цель изобретения - повышение производительности устройства при перегрузке грузов.:
Поставленная цель Достигается тем, что конвейер выполнен шагаюшим, состояшим из двух подвижных рам с механизмами их перемещения в горизонтальной и вертикальной плоскостях, а платформы выполнены с пазами для размещения упомянутых подвижных рам.
Кроме того, механизм перемещения подвижных рам в горизонтальной плоскости выполнен в виде смонтированных на основании направляющих, в которУх размещена кулиса, снабженная штырями для взаимо10действия с подвижными рамами и перемещаемая в упомянутых направляющих зубчатореечного механизма, реечная шестерня которого жестко закреплена на кулисе.
При этом кинематическая связь механизма перемещения подвижных рам в го15ризонтальной плоскости осуществляется посредством водила, снабженного гибкими и жесткими тягами, первые из которых соединены с платформами, а вторые смеханизмом перемешения подвижных рам в верти20кальной плоскости, который выполнен в виде смонтированного на боковой стороне основания двуплечего рычага, одно плечо которого снабжено опорными роликами для
подвижных рам, а другое соединено с упомянутыми жесткими тягами.
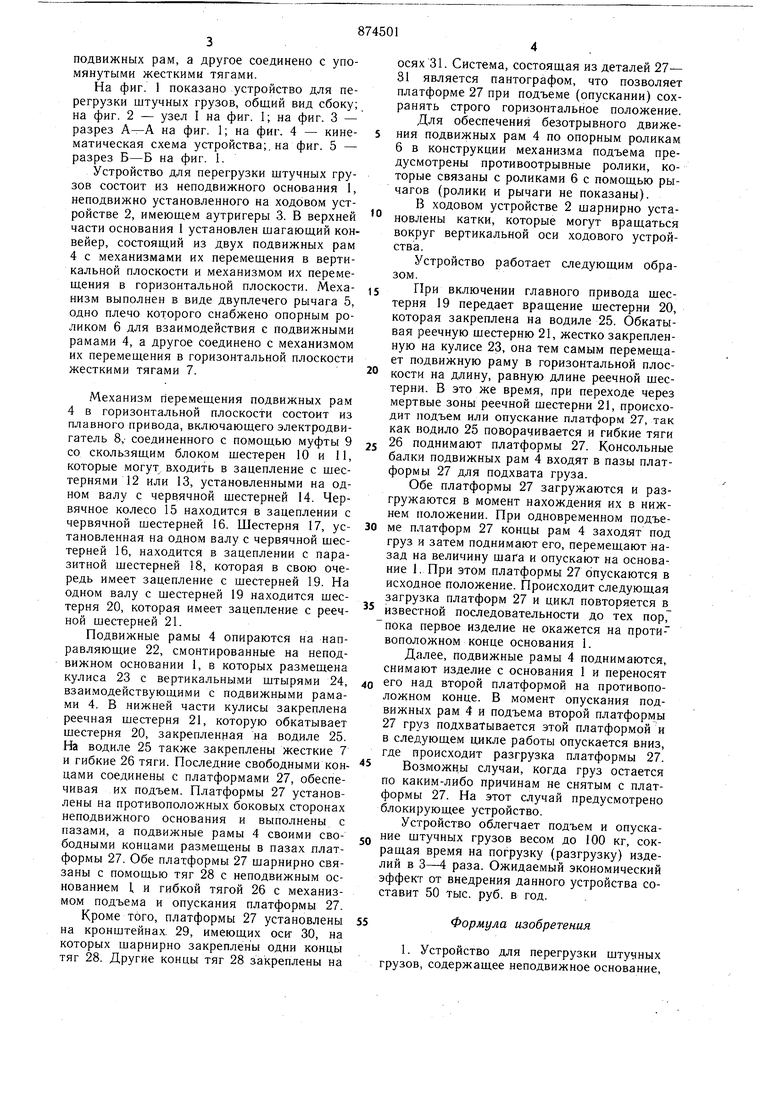
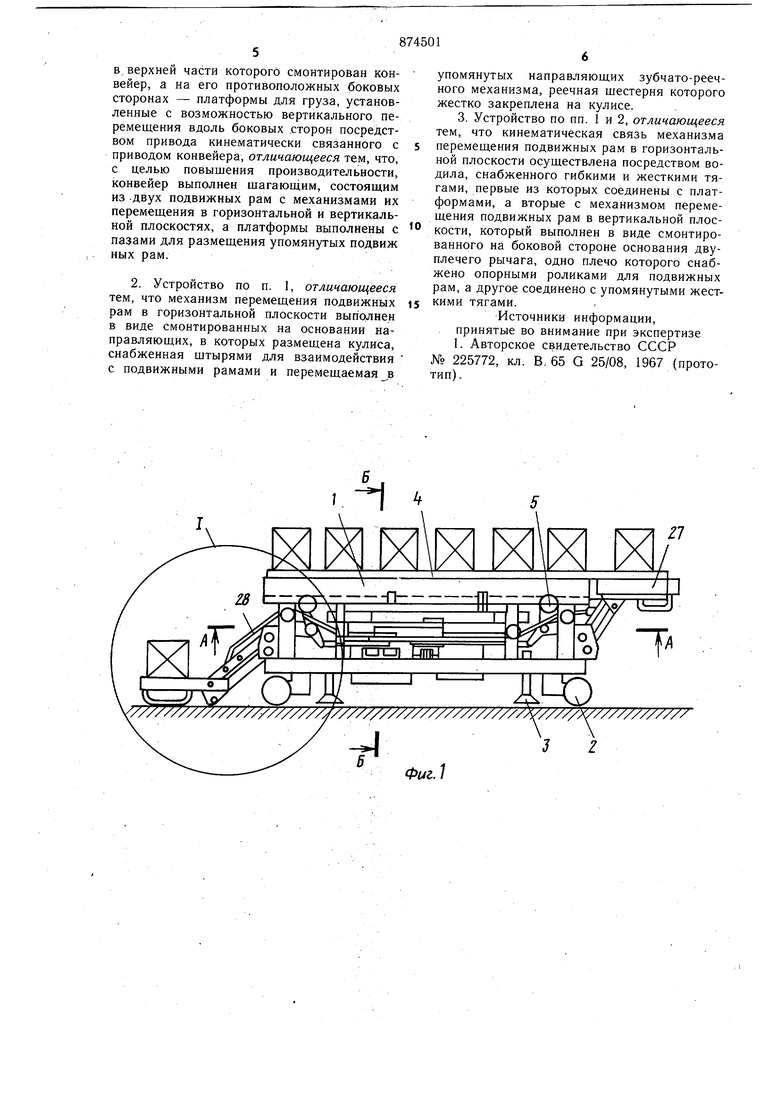
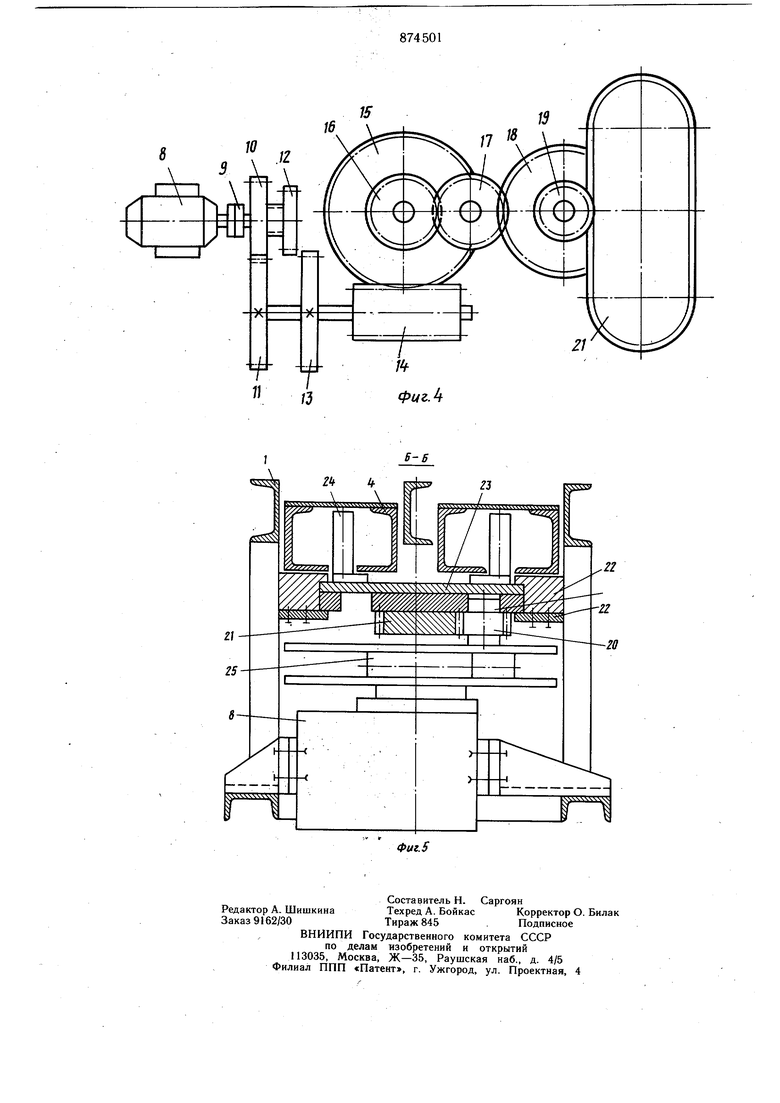
На фиг. 1 показано устройство для перегрузки штучных грузов, общий вид сбоку; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - кинематическая схема устройства;, на фиг. 5 - разрез Б-Б на фиг. 1.
Устройство для перегрузки штучных грузов состоит из неподвижного основания 1, неподвижно установленного на ходовом устройстве 2, имеюш,ем аутригеры 3. В верхней части основания 1 установлен шагающий конвейер, состоящий из двух подвижных рам 4 с механизмами их перемещения в вертикальной плоскости и механизмом их перемещения в горизонтальной плоскости. Механизм выполнен в виде двуплечего рычага 5, одно плечо которого снабжено опорным роликом 6 для взаимодействия с подвижными рамами 4, а другое соединено с механизмом их перемещения в горизонтальной плоскости жесткими тягами 7.
Механизм перемещения подвижных рам 4 в горизонтальной плоскости состоит из плавного привода, включающего электродвигатель 8, соединенного с помощью муфты 9 со скользящим блоком шестерен 10 и 11, которые могут входить в зацепление с щестернями 12 или 13, установленными на одном валу с червячной шестерней 14. Червячное колесо 15 находится в зацеплении с червячной шестерней 16. Шестерня 17, установленная на одном валу с червячной шестерней 16, находится в зацеплении с паразитной шестерней 18, которая в свою очередь имеет зацепление с шестерней 19. На одном валу с шестерней 19 находится шестерня 20, которая имеет зацепление с реечной шестерней 21.
Подвижные рамы 4 опираются на направляющие 22, смонтированные на неподвижном основании 1, в которых размещена кулиса 23 с вертикальными штырями 24, взаимодействующими с подвижными рамами 4. В нижней части кулисы закреплена реечная шестерня 21, которую обкатывает шестерня 20, закрепленная на водиле 25. На водиле 25 также закреплены жесткие 7 и гибкие 26 тяги. Последние свободными концами соединены с платформами 27, обеспечивая их подъем. Платформы 27 установлены на противоположных боковых сторонах неподвижного основания и выполнены с пазами, а подвижные рамы 4 своими свободными концами размещены в пазах платформы 27. Обе платформы 27 щарнирно связаны с помощью тяг 28 с неподвижным основанием 1, и гибкой тягой 26 с механизмом подъема и опускания платформы 27.
Кроме того, платформы 27 установлены на кронштейнах. 29, имеющих оск 30, на которых щарнирно закреплены одни концы тяг 28. Другие концы тяг 28 закреплены на
ОСЯХ 31. Система, состоящая из деталей 27- 31 является пантографом, что позволяет платформе 27 при подъеме (опускании) сохранять строго горизонтальное положение. Для обеспечения безотрывного движения подвижных рам 4 по опорным роликам 6 в конструкции механизма подъема предусмотрены противоотрывные ролики, которые связаны с роликами 6 с помощью рычагов (ролики и рычаги не показаны).
В ходовом устройстве 2 щарнирно установ ены катки, которые могут вращаться вокруг вертикальной оси ходового устройства.
Устройство работает следующим образом.
При включении главного привода шестерня 19 передает вращение шестерни 20, которая закреплена на водиле 25. Обкатывая реечную шестерню 21, жестко закрепленную на кулисе 23, она тем самым перемещает подвижную раму в горизонтальной плоскости на длину, равную длине реечной шестерни. В это же время, при переходе через мертвые зоны реечной шестерни 21, происходит подъем или опускание платформ 27, так как водило 25 поворачивается и гибкие тяги
5 26 поднимают платформы 27. Консольные балки подвижных рам 4 входят в пазы платформы 27 для подхвата груза.
Обе платформы 27 загружаются и разгружаются в момент нахождения их в нижнем положении. При одновременном подъеме платформ 27 концы рам 4 заходят под груз и затем поднимают его, перемещают назад на величину шага и опускают на основание 1. При этом платформы 27 опускаются в исходное положение. Происходит следующая загрузка платформ 27 и цикл повторяется в
известной последовательности до тех пор, пока первое изделие не окажется на проти- воположном конце основания 1.
Далее, подвижные рамы 4 поднимаются, снимают изделие с основания 1 и переносят
0 его над второй платформой на противоположном конце. В момент опускания подвижных рам 4 и подъема второй платформы 27 груз подхватывается этой платформой и в следующем цикле работы опускается вниз, где происходит разгрузка платформы 27.
5 Возможны случаи, когда груз остается по каким-либо причинам не снятым с платформь 27. На этот случай предусмотрено блокирующее устройство.
Устройство облегчает подъем и опускаQ ние щтучных грузов весом до 100 кг, сокращая время на погрузку (разгрузку) изделий в 3-4 раза. Ожидаемый экономический эффект от внедрения данного устройства составит 50 тыс. руб. в год.
Формула изобретения
//////////////////////// Л ///// /
3 I 0f/e. / упомянутых направляющих зубчато-реечного механизма, реечная щестерня которого жестко закреплена на кулисе. 3. Устройство по пп. 1 и 2, отличающееся тем, что кинематическая связь механизма перемещения подвижных рам в горизонтальной плоскости осуществлена посредством водила, снабженного гибкими и жесткими тягами, первые из которых соединены с платформами, а вторые с механизмом перемещения подвижных рам в вертикальной плоскости, который выполнен в виде смонтированного на боковой стороне основания двуплечего рычага, одно плечо которого снабжено опорными роликами для подвижных рам, а другое соединено с упомянутыми жесткими тягами. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 225772, кл. В, 65 G 25/08, 1967 (протоип).
25 K-f(
2J
22
V
ff fffff ffffff uf
.L
7 Z6
