тока, с первым угфавляющим входом первого блока прямого преобразования скоординат и подключен к выходу регулятора напряжения, второй вход регулятора реактивной составляющей тока объединен с вторым управляющим входом первого блока прямого преобразования координат и подключен к выходу 118
формирователя гармонических сигналов. 7 блока зада11ия реактивного тока, второй вход которого объединер4 с третьими входами регуляторов активной и реактивной составляющих тока и подключен к выходу блока задания частоты, а опорные входы блока обратного преобразования координат подключены к выходам
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1972 |
|
SU699639A1 |
| Электропривод | 1991 |
|
SU1837379A1 |
| Способ управления асинхронным электроприводом и устройство для его осуществления (его варианты) | 1982 |
|
SU1164851A1 |
| Электропривод | 1978 |
|
SU782114A1 |
| Электропривод переменного тока | 1984 |
|
SU1272459A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Устройство для управления асинхронной машиной с фазным ротором | 1982 |
|
SU1032581A1 |
| Асинхронный электропривод | 1982 |
|
SU1117813A1 |
| Частотно-управляемый асинхронный электропривод | 1984 |
|
SU1290464A1 |
МНОГОДВИГАТЕЛЬНЬЙ ЭЛЕКТРОПРИВОД, содержащий N(N 1, 2, 3...) асинхронных двигателей с короткозамкнутыми роторами, статорные обмотки которых в фазах включены параллельно друг другу и подключены через датчики фазных напряжений и токов к выходам преобразователя частоты с непосредственной связью, соединенного фазными управляющими вко- дами с выходами первого, второго и третьего сумматоров соответственно, первьй блок прямого преобразова.ния координат, фазные выходы которого подключены соответственно к пер-, вым входам четвертого, пятого и шестого сумматоров, соединенных выходами с входами соответствующих фазных регуляторов тока, выходы которых подключены соответственно к первым входам первого, второго и третьего сумматоров, второй блок прямого преобразования координат, фазные выходы которого подключены f.o ответственно к вторым входам первого, второго и третьего сумматоров, при этом вторые входы четвертого, пятого и шестого сумматоров подключены к выходам соответствующих датчиков фазных токов, датчик амплитуды напряжения, подключенньш входами к выходам датчиков фазных напряжений, последовательно соединенные блок задания частоты, преобразователь частота-напряжение и регулятор напряжения, вход обратной связи которого подключен к выходу датчика амплитуды напряжения, формирователь гармонических сигналов, вход которого подключен к выходу блока задания частоты, а выходы - к опорным входам S первого и второго блоков прямого (Л преобразования координат, и блок задания реактивного тока, выход ко- f торого и выход регулятора напряжения связаны с управляющими входами первого и второго блоков прямого преобразования координат, отличающийся тем, что, с целью улучшения динамических свойств за счет повьштения быстродействия, в него введены регуляторы активной и реактивной составляющих тока, каждый из которых снабжен тремя входами, и блок обратного преобразования координат, входы которого подключены к выходам датчиков фазных токов, а выходы - к первым входам регуляторов активной и реактивной составляющих тока, соединенных выходами с управляющими входами второго блока прямого преобразования координат, при этом блок задания реактивного тока выполнен в виде сумматора, первый вход которого объединен с вторым входом регулятора активной составляющей
1
Изобретение относится к электротехнике и может быть использовано для одновременного регулирования скорости нескольких асинхронных двигателей с короткозамкнутыми роторами, статорные обмотки которых включены параллельно друг другу и питаются от одного тиристорного преобразователя частоты с непосредственной связью, например, при регулировании скорости транспортных рольганговых линий прокатных станов.
Цель изобретения - улучшение динмических свойств многодвигательного электропривода за счет повьшения быстродействия.
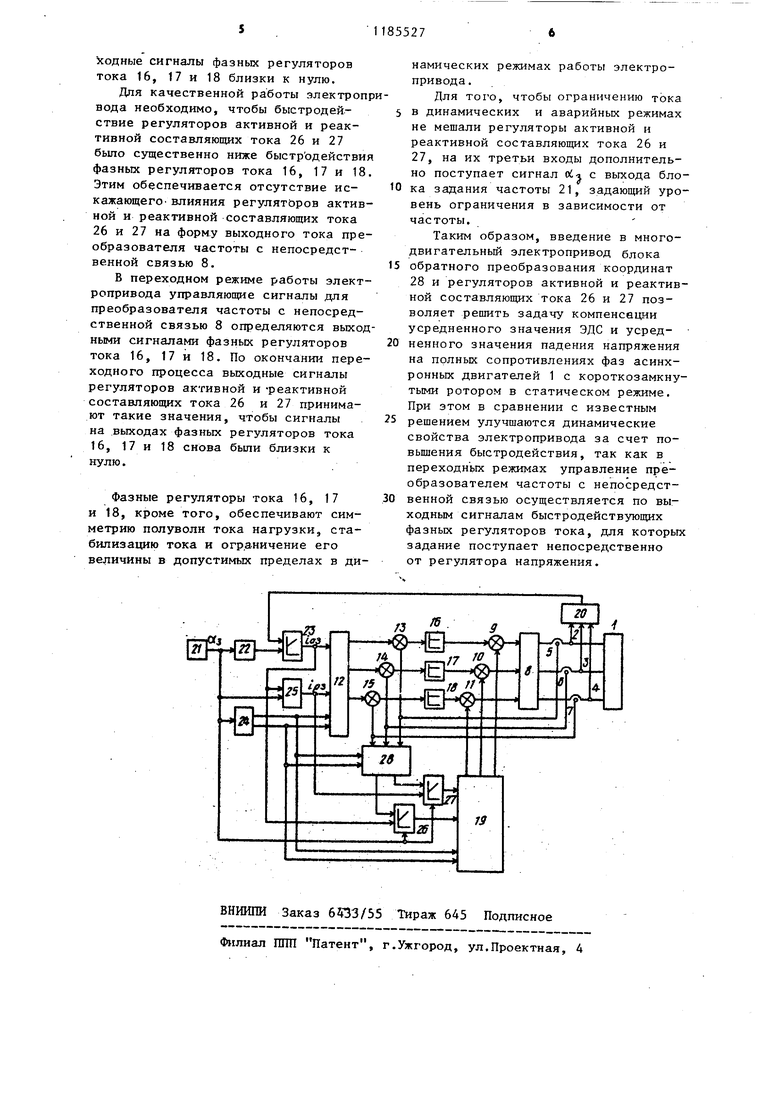
На чертеже представлена функциональная схема многодвигательного электропривода.
Многодвигательный электропривод содержит N(,2, 3. . . асинхронных двигателей 1 с короткозамкнутым ротором, статорные обмотки которых в фазах включены параллельно друг другу и подключены через датчики фазных напряжений 2, 3 и 4 и датчики фазных токов 5, 6 и 7 к выходам преобразователя частоты с непосредственной связью 8, соединенного фазными управляющими входами с выходами первого, второго и третьего сумматоров 9, 10 и 11 соответственно, первьй блок прямого преобразования координат 12, фазные выходы которого подключены соответственно к первым входам четвертого, пятого и шестого сумматоров 13, 14 и 15, соединенных выходами с входами соответствующих фазных регуляторов тока 16, 17 и 18, выходы которых подключены соответственно к первым входам первого, второго и третьего
сумматоров 9, 10 и 11, второ/i блок прямого преобразования координат 19, фазные выходы которого подключены соответственно к вторым входам первого, второго и третьего сумматоров 9, 10 и 11, при этом вторые входы четвертого, пятого и шестого сумматоров 13, 14 и 15 подключены к выходам соответствующих датчиков
фазных токов 5, 6 и 7, датчик амплитуды напряжения 20, подключенньй входами к выходам датчиков фазных напряжений 2, 3 и 4, последовательно соединенные блок задания частоты 21,
преобразователь частота-напряжения 22 и регулятор напряжения 23, вход обратной связи которого подключен к вьгходу датчика амплитуды напряжения 20, формирователь гармонических сигналов 24, вход которого подключен к выходу блока задания частоты 21, а выходы - к опорньт входам первого и второго блоков прямого преобразования координат 12 и 19,и блок задания реактивного тока 25, выход которого
и выход регулятора напряжения 23 связаны с управляющими входами первого и второго блоков прямого преобразования координат 12 и 19.
В многодвигательный электропривод введены регуляторы активной и реактивной составляющих тока 26 и 27 соответственно, . каждый из которых снабжен тремя входами, и блок обратного
преобразования координат 28, входы которого подключены к выходам датчиков фазных токов 5, 6 и 7, а выходы к первым входам регуляторов активной и реактивной составляющих тока 26 и
27, соединенных выходами с управлякщими входами второго блока прямого преобразования координат 19, при 3 этом блок задания реактивиого тока 25 выполнен в виде сумматора, первы вход которого объединен с вторым вх дом регулятора активной составляющей тока 26, с первым управляющим входом первого блока прямого преобразования координат 12 и подключен к выходу регулятора напряжения 23, второй вход регулятора реактивной составляющей тока 27 объединен с вторым управляющим входом первого блока прямого преобразования координат 12 и подключен к выходу блока задания реактивного тока 25, второй вход которого объединен с третьими входами регуляторов активной и реак тивной составляющих тока 26 и 27 и подключен к выходу блока задания частоты 21, а опорные входы блока обратного преобразования координат 28 подключены к выходам формирователя гармонических сигналов 24. Многодвигательный электропривод работает следующим образом. Аналоговый сигнал « , поступающий с выхода блока задания частоты 21, преобразуется с помощью преобразователя частота-напряжение 22 в управляющий сигнал регулятора напряжения 23, Сигнал обратной связи для регулятора напряжения 23 поступает с выхода датчика амплитуды нап ряжения 20, где формируется по выходным сигналам датчиков фазных напряжений 2, 3 и 4. Стабилизация выходных напряжений преобразователя частоты с непосредственной связью 8 на заданном уровне при неизменной частоте обеспечивается воздействием на величины активной и реактивной составляющ х тока параллельно включенных асинхро ньк двигателей 1 с короткозамкнутым ротором. Сигналом задания величины активной составляющей тока двигателей является выходной сигнал i ре гулятора напряжения 23. Сигналом за дания величины реактивной составляющей тока двигателей является выходной сигнал ip блока задания реактивного «тока 25. Его величина зависит от зйачений сигнала задания частоты oiii и задания активной составляющей тока i,, так как при увеличении активного тока при неизменном напряжении на двигателях реактивньй ток уменьшается. 7 /1пя обеспечения возможности использования фазных регуляторов тока 16, 17 и 18, а также для обеспечения раздельного управления группами тиристоров преобразователя частоты с непосредственной связью 8 необходимы сигналы задания фазных токов и сигналы компенсации падений напряжения на нагрузке. Указанные сигналы компенсации должны суммироваться с соответствующими по фазе выходными сигналами фазных регуляторов тока 16, 17 и 18. Сигналы задания фазных токов формируются с помощью первого блока прямого преобразования координат 12, на управляющие входы которого посту- пают сигналы задания активного i, и реактивного i p-i токов с выходов регулятора напряжения 23 и блока задания реакт1 вного тока 25 соответственно, а на опорные входы - сигнапы sin ос t, cos ОС t с выхода формирователя гармонических сигналов 24, формируемые по сигналу о; ч . Сигналы компенсации падений напряжений на нагрузке (на параллельно включенных фазах асинхронных двигателей с короткозамкнутым ротором 1) формируются с помощью блока обратного преобразования координат 28, регуляторов активной и реактивной составляющих тока 26 и 27 и второго блока прямого преобразования координат 19. На выходе блока обратного преобразования координат 28 по выходным сигналам датчиков фазных токов 5, 6 и 7 формируются действительные значения активной и реактивной составляющих тока, которые сравниваются с соответствующими сигналами задания f на входах регуляторов активной и реактивной составляющих тока 26 и 27. По результатам указанного сравнения на выходах второго блока прямого преобразования координат 19 формируются фазные сигналы компенсации, поступающие на сумматоры 9, 10 и 11. Б установившемся режиме работы электропривода сигналы компенсации включают в себя не только усредненное значение ЭДС асинхронных двигателей 1 с короткозамкнутым ротором, но и усредненное значение падения напряжения на полных сопротивлениях фаз этих двигателей. При этом вы
| Электропривод | 1978 |
|
SU782114A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для частотного управления электроприводом | 1982 |
|
SU1089749A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
