I
Изобретение относится к сельскохозяйственному машиностроению, а именно к высокоманевренным самоходным шасси.
Известны самоходные шасси, содержащие раму и закрепленные в ней на вертикальных осях поворота четы-ре колеса, рычаги управления которыми попарно связанны между собой гидроцилиндрами, уп.равляюш,ими поворотом шасси.
Недостатком этих шасси является большой радиус поворота, значительно превышаюк ий величину поперечиной базы самоходного шасси, что приводит к необходимости .наличия широких поворотных полос.
Этот недостаток ограничивает орименение самоходных шасси при выпоЛ|НенИ1и работ на небольших участках и особенно в тепяицах и парниковых хозяйствах.
Цель изобретения - создание высокоманевренного самоходного шасси, обеспечиваюш,его поворот его вокруг точки, расположенной в плоскости врашения боковых колес, по радиусу, близкому к вел-нчине поперечной багы самоходного шасси.
Это достигается тем, что в предлагаемом самоходном шасси боковые колеса попарно установлены в траверсах, середины которых шарнирно соединены между собой элементом рамы.
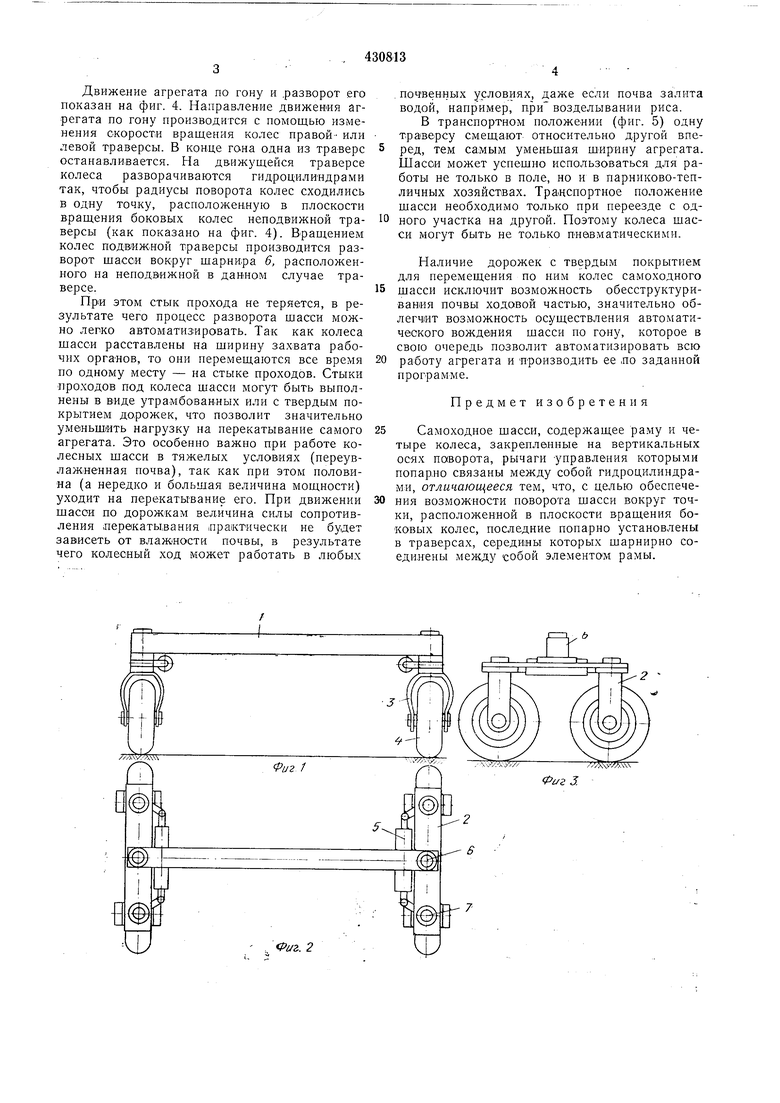
На фиг. 1 изображено самоходное шасси,
вид спереди; на фиг. 2 - то же, вид сверху;
на фиг. 3 - то же, вид сбоку; на фиг. 4 -
схема поворота шасси; на фиг. 5 - транспорт«ое положение самоходного шасСИ.
Шасси состоит из рамы 1, двух траверс 2, четырех вилок 3, четырех колес 4, двух гидроцилиндров 5, управляюш,их поворотом колес. Рама 1 с траверсами 2 соединена с помощью
шарниров 6. ВГитки 5 имеют вертикальные оси поворота 7, закрепленные в траверсах 2. Колеса расставляются на ширину за.хвата рабочих органов.
Рама 1 может быть сменной, в зависимости от типа навешздваемых на нее рабочих органов. Рамой шасси может служить рама рабочего органа, например, зерноуборочного ком-байна. В этом случае к комбайну присоединяются с двух сторон траверсы с колесами.
На одной траверсе может быть расположен двигатель внутреннего сгорания с гидронасосами привода колес, а на второй траверсе - кабниа водителя и вся система управления. Для приеода колес могут использоваться
гидромоторы. (Двигатель с насосами, кабина и гидромоторы на схеме не показаны).
В процессе работы траверсы 2 имеют возможность поворачиваться относительно шарниров 6. Колеса 4 поворачиваются на осях 7
с помош,ью гидроцилиндров 5.
Движение агрегата по гону и .разворот его показан на фиг. 4. Направление движения агрегата по гону производится с помощью изменения скорости вращения колес правой- или левой траверсы. В конце гона одна из траверс останавливается. На движущейся траверсе колеса разворачиваются гидроцилиядрами так, чтобы радиусы поворота колес сходились в одну точку, расположенную в плоскости вращения боковых колес неподвижной траверсы (как показано на фиг. 4). Вращением колес подвижной траверсы производится разворот щасси вокруг щарнира 6, расположенного на неподвижной в данном случае траверсе.
При этом стык прохода не теряется, в результате чего процесс разворота щасси можно легко автоматизировать. Так как колеса щасси расставлены на щирину захвата рабочих органов, то они перемещаются все время по одному месту - на стыке проходов. Стыки проходов под колеса шасси могут быть выполнены в виде утрамбованных или с твердым покрытием дорожек, что позволит значительно уменьшить нагрузку на перекатывание самого агрегата. Это особенно важно при работе колесных щасси в тяжелых условиях (переувлажненная почва), так как при этом половина (а нередко и большая величина мощности) уходит на перекатывание его. При движении щасои по дорожкам величина силы сопротивления .перекатывания лраа тически не будет зависеть от влажности почвы, в результате чего колесный ход может работать в любых
почвенных условиях, даже если почва залита водой, например, при возделывании риса.
В транспортном положении (фиг. 5) одну траверсу смещают относительно другой вперед, тем самым уменьшая щирину агрегата. Шасои может уснещно использоваться для работы не только в поле, но и в парниково-тепличных хозяйствах. Транспортное положение шасси необходимо только при переезде с одного участка на другой. Поэтому колеса шасси могут быть не только пневматическими.
Наличие дорожек с твердым покрытием для перемещения по ним колес самоходного
шасси исключит возможность обесструктуривания почвы ходовой частью, значительно облегчит возможность осуществления автоматического вождения шасси по гону, которое в свою очередь позволит автоматизировать всю
работу агрегата и производить ее ,по заданной программе.
Предмет изобретения
Самоходное шасси, содержащее раму и четыре колеса, Закрепленные на вертикальных осях поворота, рычаги управления которыми попарно связаны между собой гидроцилиндрами, отличающееся тем, что, с целью обеспечения возможности поворота шасси вокруг точки, расположенной в плоскости вращения боковых колес, последние попарно установлены в траверсах, середины которых шарнирно соединены между собой элементом рамы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления движением самоходного шасси | 1981 |
|
SU1090275A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1063303A1 |
| "Самоходное шасси | 1979 |
|
SU843798A1 |
| Самоходное шасси для сельскохозяйственных работ | 1984 |
|
SU1391512A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Почвообрабатывающий агрегат | 1975 |
|
SU631099A1 |
| Лесопосадочный агрегат | 1982 |
|
SU1034634A1 |
| Самоходное шасси | 1977 |
|
SU674704A1 |
| Агрегат для погрузки и выгрузки материалов | 1985 |
|
SU1306498A1 |
| Уборочный агрегат | 1981 |
|
SU1007588A1 |

Фи2 1
Фиг. 2
ff/2 3.
( 5
Фиг
