Изобретение относится к сельскохозяйственному машиностроению, в частности к устройствам, автоматизирующим процесс направления движения по заданной траектории сельскохозяйственных машин с закрепленными на рамке рабочими органами, взаимодействующими с почвой.
Известно устройство для ручного и автоматического направления движения машины по рядкам растений, например сахарной свеклы, содержащее гидромеханическую следящую систему автоматического управления с копирующими щупами, имеющими подвижную на раме опору, кинематически связанную с ручным механизмом управления (АС СССР №320252, А01В 69/04).
Недостатком устройства является не всегда своевременное возвращение рабочих органов на заданную траекторию при отклонении, особенно у широкозахватных агрегатов со значительным тяговым сопротивлением или при работе на склонах.
Известно устройство автоматического вождения сельскохозяйственной машины, имеющей подвижную раму, в рабочем положении опирающуюся на балку передних колес и фиксирующуюся в соответствии с глубиной хода рабочих органов, и установленные на рамке рабочие органы, в котором автомат вождения содержит копирующий датчик, связанный с гидрораспределителем управления гидроцилиндром поворота направляющих колес, а рамка с рабочими органами соединена с подвижной рамой посредством гидроцилиндра управления ее поворотом в горизонтальной плоскости, связанного через делители потока с гидрораспределителем. Поворот рамки с рабочими органами-движетелями в горизонтальной плоскости одновременно с поворотом направляющих колес устраняет отклонение машины от заданной траектории (АС СССР №1386093, А01В 69/02, прототип).
Недостатком устройства является то, что оно может работать только с активными, создающими движущую силу, рабочими органами.
В предлагаемом устройстве рамка с рабочими органами по оси симметрии, совпадающей с направлением движения, соединена с подвижной рамой шарнирно, а по сторонам - через гидроцилиндры ее поворота в вертикальной плоскости, связанные с гидрораспределителем автомата вождения.
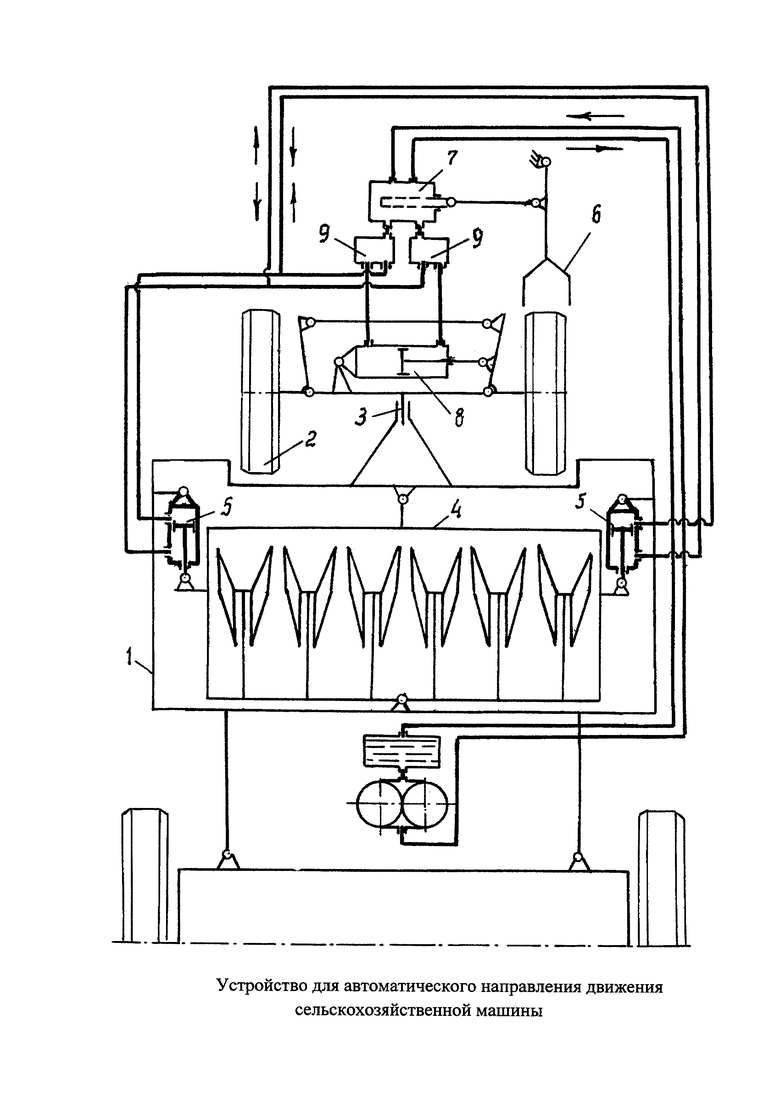
На чертеже изображена схема устройства для автоматического направления движения сельскохозяйственной машины.
Устройство состоит из закрепленной на остове машины подвижной рамы 1, в рабочем положении опирающейся на балку передних колес 2 и фиксирующейся в соответствии с заданной глубиной хода рабочих органов механизмом 3. Рамка 4 с рабочими органами по оси симметрии, совпадающей с направлением движения, соединена с подвижной рамой 1 шарнирно, а по сторонам через гидроцилиндры 5 поворота рамки 4 - в вертикальной плоскости.
Автомат вождения содержит копирующий датчик 6 отклонения машины от заданной траектории, кинематически связанный с гидрораспределителем 7 управления гидроцилиндром 8 поворота направляющих колес 2, и гидроцилиндры 5 поворота рамки 4 в вертикальной плоскости, связанные через делители потока 9 с гидрораспределителем 7 и гидроцилиндром 8 поворота направляющих колес 2.
Устройство работает следующим образом.
При переводе рабочих органов в рабочее положение подвижная рама 1 опирается на балку передних колес 2 и фиксируется механизмом 3 в соответствии с заданной глубиной хода рабочих органов. Одновременно происходит опускание копирующего датчика 6.
Во время движения машины по прямой траектории копирующий датчик 6 устанавливает плунжер гидрораспределителя 7 в нейтральное положение. Рабочая жидкость, нагнетаемая гидронасосом, направляется на слив, положение направляющих колес 2 соответствует траектории, а рамка 4 с рабочими органами занимает горизонтальное положение. Глубина хода рабочих органов с каждой из сторон рамки 4 соответствует заданной.
При отклонении машины от заданной траектории копирующий датчик 6 выводит плунжер гидрораспределителя 7 из нейтрального положения и рабочая жидкость через делители потока 9 направляется одновременно в гидроцилиндр 8 поворота направляющих колес 2 и в гидроцилиндры 5 изменения положения рамки 4 в вертикальной плоскости. Сторона рамки 4 со стороны увода поднимается относительно подвижной рамы 1, а с противоположной опускается, что изменяет глубину хода рабочих органов и их тяговое сопротивление с каждой из сторон рамки 4. Разное тяговое сопротивление рабочих органов по сторонам рамки 4 создает момент сил, стремящийся возвратить ее совместно с поворотом направляющих колес на заданную траекторию. При этом регулировкой добиваются, чтобы глубина хода рабочих органов во время изменения положения рамки 4 не отличалась от заданной более чем на 2-3 см, что достаточно для создания момента сил, способствующего возвращению машины на заданную траекторию без оказания существенного влияния на качество выполнения технологического процесса.
Предлагаемое устройство за счет изменения тягового сопротивления рабочих органов с противоположных сторон рамки и одновременного поворота направляющих колес способствует более быстрому устранению отклонения машины от заданной траектории. Это повышает точность вождения и улучшает качество выполнения технологического процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для вождения самоходной сельскохозяйственной машины | 1976 |
|
SU1386093A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| БОТВОУБОРОЧНАЯ МАШИНА | 2016 |
|
RU2647910C2 |
| Копирующее устройство для автоматического вождения сельскохозяйственной машины по борозде | 1981 |
|
SU959649A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Система автоматического направления технологических рабочих органов сельскохозяйственной машины | 1983 |
|
SU1165251A1 |
| УСТРОЙСТВО ДЛЯ ВОЖДЕНИЯ ПОЧВООБРАБАТЫВАЮЩЕГО ОРУДИЯ ПО РЯДКАМ РАСТЕНИЙ | 2007 |
|
RU2354102C1 |
| СПОСОБ УПРАВЛЕНИЯ СЕЛЬСКОХОЗЯЙСТВЕННЫМ АГРЕГАТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2023360C1 |
| Устройство для стабилизации хода самоходных машин, работающих на склонах | 1988 |
|
SU1575969A1 |
| Сельскохозяйственный агрегат | 1982 |
|
SU1085536A1 |
Изобретение относится к сельскохозяйственному машиностроению. Устройство для автоматического направления движения сельскохозяйственной машины имеет подвижную раму, рамку с рабочими органами и автомат вождения. Подвижная рама в рабочем положении опирается на балку передних колес. Рамка с рабочими органами шарнирно соединена по оси симметрии, совпадающей с направлением движения машины, с подвижной рамой. Автомат вождения содержит копирующий датчик и гидроцилиндры поворота рамки. Копирующий датчик кинематически связан с гидрораспределителем управления гидроцилиндром поворота направляющих колес. Гидроцилиндры поворота рамки в вертикальной плоскости соединены с ней по сторонам и связаны с гидрораспределителем через делители потока. Устройство способствует быстрому устранению отклонения машины от заданной траектории. 1 ил.
Устройство для автоматического направления движения сельскохозяйственной машины, имеющее подвижную раму, в рабочем положении опирающуюся на балку передних колес, и рамку с рабочими органами, шарнирно соединенную с ней, автомат вождения, содержащий копирующий датчик, кинематически связанный с гидрораспределителем управления гидроцилиндром поворота направляющих колес, и гидроцилиндр поворота рамки, связанный с гидрораспределителем через делители потока, отличающееся тем, что рамка с рабочими органами по оси симметрии, совпадающей с направлением движения машины, соединена с подвижной рамой шарнирно, а по сторонам через гидроцилиндры ее поворота в вертикальной плоскости.
| Устройство для автоматического направления движения колесного трактора | 1982 |
|
SU1099865A1 |
| Самоходная корнеклубнеуборочная машина | 1982 |
|
SU1090276A1 |
| Способ автоматического вождения колесного трактора и устройство для его осуществления | 1986 |
|
SU1396979A1 |
| Устройство для автоматического направления движения тракторного агрегата | 1978 |
|
SU710538A1 |
| US 3472322 A, 14.10.1969. | |||

