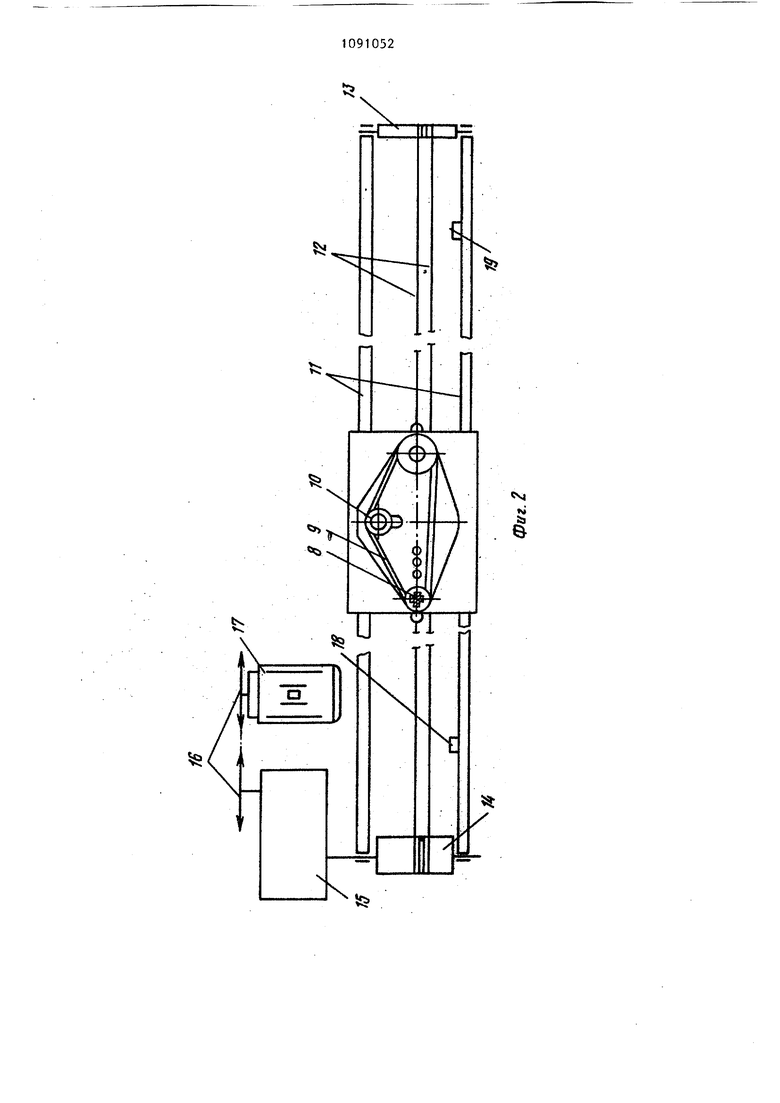
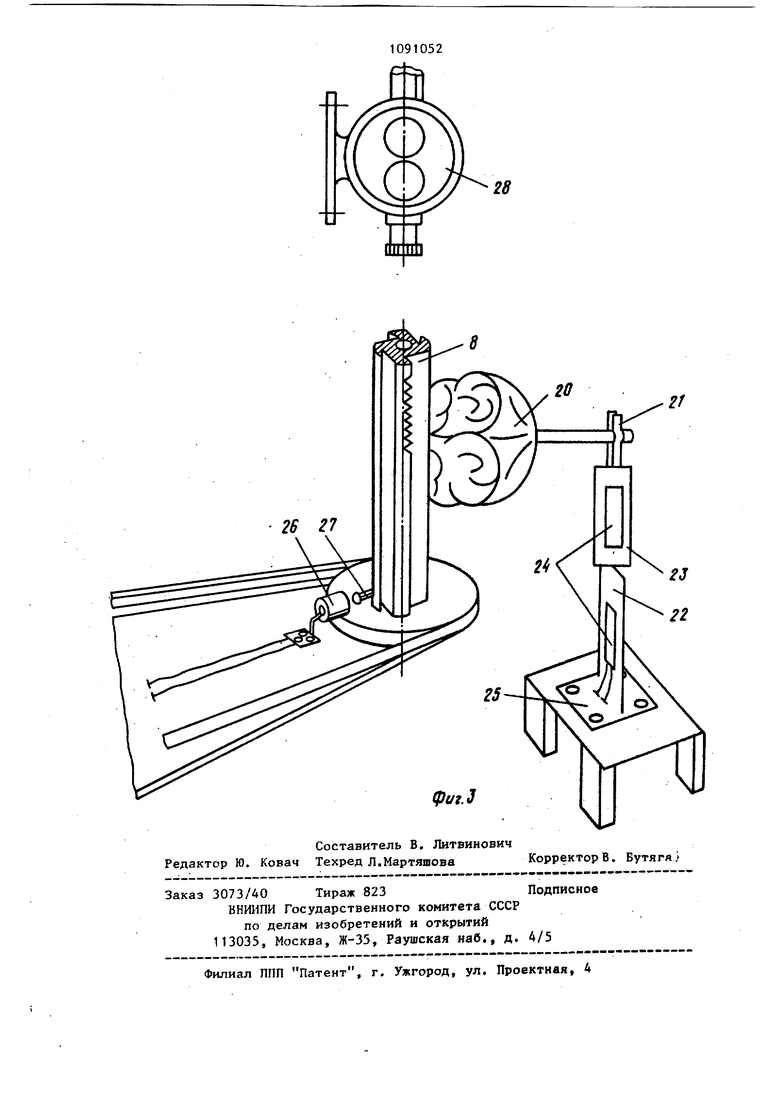
Изобретение относится к исследованиям процесса сбора хлопка хлопко уборочным аппаратом. Известен стенд для исследования хлопкоуборочного аппарата, содержащий укороченные шпиндельные барабаны и съемные барабаны с приводными механизмами, установленными снизу барабанов с целью наблюдения процес са сбора хлопка с верхней стороны стенда Cl. Недостатками данного стенда явля ются нереальность условий сбора хло ка, так как необходимо, чтобы куст стоял неподвижно, а шпиндельные барабаны, имели поступательное движени вместе с хлопкоуборочной машиной и трудоемкость изменения геометрических параметров шпиндельного бара бана и шпинделя. Цель изобретения - приближение условий сбора хлопка в исследования к реальным и обеспечение широкого изменения геометрических и кинемати ческих параметров исследуемых хлопкоуборочных апнаратов. Указанная цель достигается тем, что стенд.имеет тележку с установле ным на ней водилом, кинематически связанным с.приводом колес тележки, а рабочий орган установлен на водиле с возможностью изменения радиуса вращения. На фиг. 1 показана схема тележки стенда; на фиг. 2 - стенд, общий . вид; на фиг. 3 - взаимодействие хлоп ковой коробочки и шпинделя во время работы стенда, установка скоростей кино- или фотокамеры. Тележка состоит из корпуса 1, который установлен на четырех колесах 2 с помощью осей 3, и подшипников 4 качения. На тележки установле но водило 5. Привод одного из колес 2 тележки осуществляется с помощью конической шестерни Z и Z, шестерни Za, Z и Zj. Передаточное число от колес 2 до водила 5 изменяется в зависимости от числа зубьев шестер ни Z, Z, Z. С помощью солнечного колеса Z ., шестерни Z-, Zg, Zn и шкивов 6 и 7 осуществляется привод к шпинделю 8, установленному на водиле 5. Относительная угловая скорость шпинделя 8 зависит от числа зубьев шестерни Zg и Zg и диаметра шкивов 6 и 7. При этом шпиндель 8 можно устанавливать на различном расстоянии относительно центра вра522щения водила. Приводной ремень 9 шпинделя 8 подтягивается с помощью ролика 10 (фиг, 2), Тележка движется на рельсах 11 с помощью троса 12, связанного с барабанами 13 и 14. Привод к барабану 14 осуществляется через вариатор 15 и цепную передачу 16 от электродвигателя 17, который подсоединен к источнику тока через включатели 18 и 19, служащие для автоматического включения электродвигателя 17 во время остановки системы. Таким образом, поступательную скорость движения тележки можно изменять посредством вариатора 15. Хлопковая коробочка 20 устанавливается на пути движения шпинделя 8 с таким расчетом, чтобы она соприкасалась со шпинделем 8 (фиг, 3), Это возможно благодаря жесткой передаче предлагаемой системы, .Хлопковая коробочка 20 установлена зажимом 21 на тензобалках 22 и 23, склеенных тензодатчиками 24, которые реагируют на усилие в двух перпендикулярных направлениях. Все они установлены жестко на основании 25 (например, столе). На водиле 5 устанавливается индикаторный датчик 26 оборотов шпинделя 8, Перед датчиком на шпинделе 8 завернут болт 27, Над коробочкой 20 неподвижно установлена кино- или фотокамера 28 для записи процесса извлечения на кино- или фотопленки. Стенд для исследования процесса извлечения хлопка шпинделем хлопкоуборочного аппарата работает следующим образом. При пуске электродвигателя 17 от цепной передачи 16 получает привод вариатор 15. Последний вращает барабан 14, который двигает тележку с одной стороны конца рельса 11 к другому концу с помощью троса 12, Когда колесо тележки начинает вращаться через конические шестерни Zи Z2 и шестерни Z,, Zj , водило 5 получает вращательное движение относительно тележки. Вращение телелски, в свою очередь, приводит к вращению шпинделя 8, так как он получает привод от.солнечной шестерни Z, установленной на тележке через шестерни Z-, Zg и ZQ и ременную передачу. Таким образом, движение шпинделя состоит из трех составляющих; прямолинейного перемещения вместе с тележкой; вращательного движения с водилом вокруг его центра; вращения шпинделя вокруг своей оси. Следовательно, абсолютное движение шпинделя совпадает с движением шпинделя, установленного на хлоп-5 коуборочной машине.
Регулировка скоростных режимов работы стенда производится с изменением оборотов электродвигателя 17 постоянного тока с помощью вариатора tSip а также изменением передаточных чисел приводов водила 5 и шпинделя 8. Паз сделанный на водила 5 для шпинделя 8 с его шкивом барабана хлопкоуборочного аппарата, т.е. расстояние от цент-j5 pa шпинделя 8 до центра вращения водила 5 находится в пределах 98-380 мм. Шпиндель 8 на стенде сменный - возможна установка шпинделя с произвольным внешним диаметром и любой формы. 20
Движение тележки прекращается пос-. ле прохода ею включателей 18 и 19, так как они отсоединяют электродвигатель 17 от источника тока при действии нижней части тележки. Включатели 18 и 19 устанавливаются на определенном расстоянии от конца рельса 11 с учетом тормозного пути тележки. Хлопковая коробочка 20 (или несколько коробочек) устанавливается на пути движения щпинделя 8 с учетом начала равномерного движения тележки (фиг. 3).
Скоростная кино- или фотокамера 28 установленная неподвижно сверху коробочки 20, записывает протекание процесса. Одновременно записываются усилия, действующие на коробочку 20 в двух перпендикулярных направлениях, с помощью регистратора - тензобалок 22 и 23 и частота оборотов шпинделя с помощью индикаторного датчика 26.
Применение предлагаемого стенда позволяет приблизить условия сбора хлопка в исследованиях к реальным и обеспечить широкое изменение геометрических и кинематических параметров исследуемых аппаратов.
.
т«
U ri 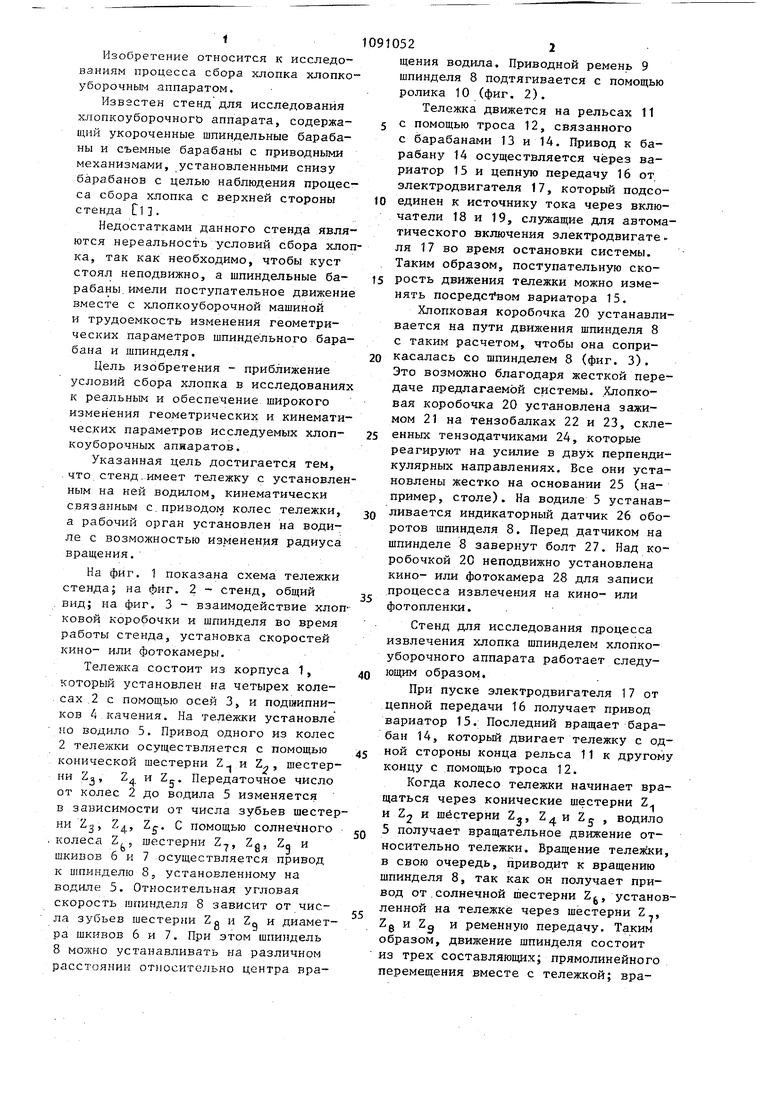

| название | год | авторы | номер документа |
|---|---|---|---|
| Привод рабочих органов хлопкоуборочной машины | 1980 |
|
SU931126A1 |
| Вертикально-шпиндельный барабан с поджимным цилиндром хлопкоуборочного аппарата | 1989 |
|
SU1766317A1 |
| Хлопкоуборочный аппарат | 1989 |
|
SU1664162A1 |
| Приспособление к хлопкоуборочному аппарату | 1975 |
|
SU715053A1 |
| Шпиндель хлопкоуборочного аппарата | 1986 |
|
SU1646505A1 |
| Хлопкоуборочный аппарат | 1979 |
|
SU820712A1 |
| Хлопкоуборочный аппарат | 1979 |
|
SU824906A1 |
| Хлопкоуборочный аппарат | 1982 |
|
SU1101195A2 |
| Шпиндельный барабан хлопкоуборочного аппарата | 1990 |
|
SU1816416A1 |
| Хлопкоуборочная машина | 1977 |
|
SU738542A1 |
СТЕНД ДЛЯ ИССЛЕДОВАНИЯ ПРОЦЕССА ИЗВЛЕЧЕНИЯ ХЛОПКА .ШПИНДЕЛЕМ ХЛОПКОУБОРОЧНОГО АППАРАТА, содержащий рабочий орган с приводом его вращения .и регистратор, отличающийся тем, что, с целью Приближения условий к реальным, он имеет тележку с установленным на ней водилом, кинематически связанным с приводом колес тележки, а рабочий орган. установлен на водиле с возможностью изменения радиуса вращения.
«
I/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сабликов М.В | |||
| Исследование шпиндельных аппаратов хлопкоуборочных машин | |||
| Ташкент ГОСИЗДАТ УзССР, 1959, с | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
| -Of | |||
