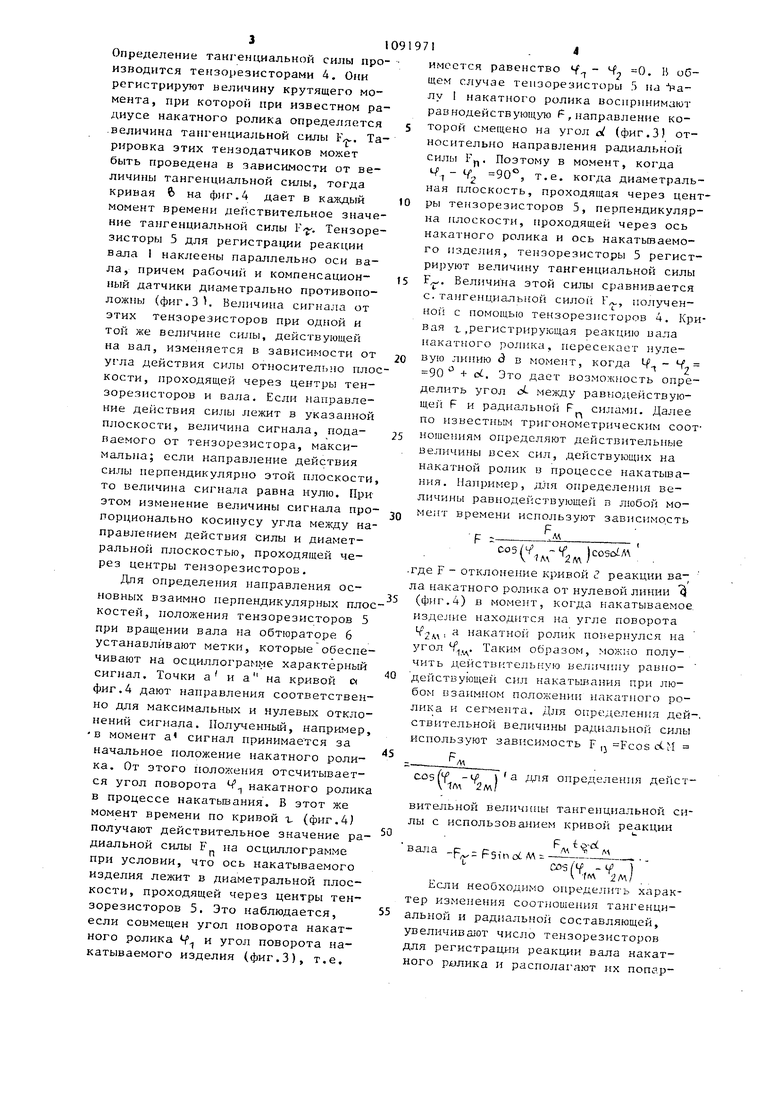
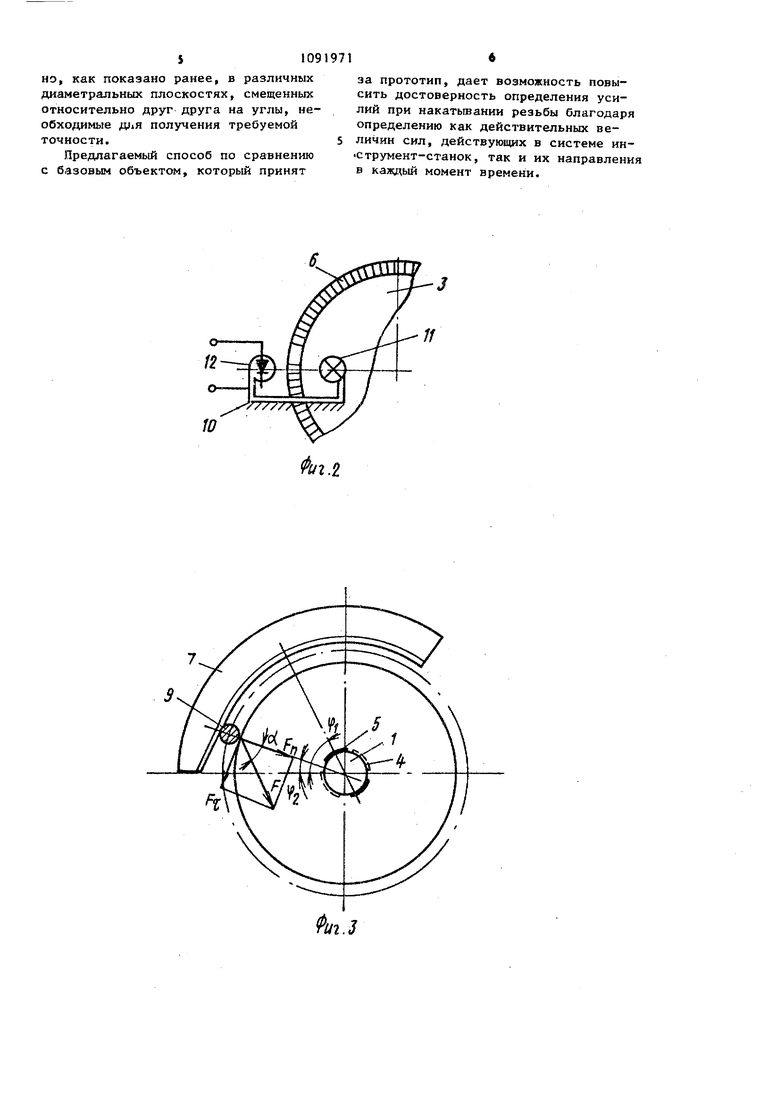
Изобретение относится к обработке металлов давлением и может быть использовано при исследовании, прое тировании и расчете резьбонакатного оборудования и инструмента. Известен способ определения усилий, действующих при накатьшании резьбы, при котором регистрация уси лий производится на тензометрически элементах, установленных в станине и воспринимающих нагрузку на сегМ&11 Cl . Однако такой способ дает только качественную Картину изменения сил при накатывании, т.е. не обеспечивает требуемой точности. {-l3Bt-CTeH способ определения ради альных усилий, реализованный в устройстве, позволяющем осуществлять осциллографическую регистрацию радиальных и тангенциальных составляющих сил, значений углов поворота ролика и изделия С 2. Недостатком известного способа является невысокая достоверность оп ределения усилий в связи с невозмож ностью определения действительных значений радиальных и тангенциальных cocтaвляюoI x сил непосредственн в процессе накатывания резьбы. Цель изобретения - гювьшение достоверности определения усилий при накатывании резьбы. Указанная цель, достигается тем, что согласно способу определения ус лий при накатывании резьбы на автоматах типа ролик-сегмент, включающе му Б себя осциллографическую регист рацию радиальных, тангенциальных со ставляющих сил, значений пово рота ролика и изделия, мгновенные значения радиальной и тангенциально составляющих сил измеряют при каж,цо изменении угла поворота ролика и изделия и измеряют угол между напра лением равнодействующей и радиально сил. На фиг. 1 изображена схема установки приборов на узле ролик-сегмен на фиг.2 - вид А на фиг.1 (на отмет чик углов поворота накатного ролиКа ); на фиг. 3 - узел ролик-сегмент вид сверху; на фиг, 4 - оси ишограм ма, пример. Автомат ролик-сегмент с приборами содержит вал 1, расположенный в Под иипниках 2 станины автомата (показано условно), На валу I жестко закреплен накатной ролик 3, а нижНИИ конец иала соединен с пииводом автомата (не показано)„На валу наклеены. напоимеп,.тензорезисторы 4 для регистрации крутящего момента, .тензорезисторы 5 для регистрации равнодействующей , действующих на накатной ролик при на-, катывании, и установлен обтюратор 6. На сегменте 7 смонтирован отметчик 8 углового положения накатываемого изделия 9. На сегменте 7 закреплен корпус IО отметчика углов поворота накатного ролика, осветитель 1 и фотодиод 12 с элементами питания и усиления (не показано/. Определение усилий при накатыва-.; НИИ проводят следующим образом, Протарированные приборы подключают к тензометрической аппаратуре (не показано ,). Включают автомат, в результате чего накатной ролик вращается на валу I в направлении, указанном стрелкой. Изделие 9 подается на позицию обработки, увлекается накатным роликом 3 в зазор между ним и сегментом 7. При вращении накатного ролика о-бтюратор 6 перег1ещается, перекрывая луч от осветителя I1 на фотодиод 12 в соответствии с числом пазов иа обтюраторе. Изменение освеа|енности фотодиода 2 вызывает изменение величины тока, подаваемого на гальванометр регистрирующего прибора, в- результате чего на осциллограмме (фиг.4| получают пилообразную кривую а, показывающую изменение углового положения накатного ролика во времени. Изделие 9, вращаясь вокруг собственной оси, обкатывается по неподвижному сегменту 7. При этом меняется ее угловое положение относителы о центра накатного ролика 3. Этот параметр регистрируется, например, индукционным отметчиком 8, подающим линейный сигнал (кривая , фиг.4), величи а которого пропорциона:,ьна угловому положению заготовки при прохождении ее в зазоре между накатным роликом 3 и сегментом 7. В процессе накатывания на накатной ролик 3 действуют тангенциальная bV (фиг.З и радиальная F силы, которые образуют равнодействутощую силу F, направление которой зависит от положения накатьшаемого изделия, определяемого углом и соотношения тангенциальной и радиальной силы, т.е. утла об.
Определение тантеициальной силы производится тензорезисторами 4. Они регистрируют величину крутящего момента, при которой при известном радиусе накатного ролика определяется
.величина тангенциальной силы Ьу. Тарировка этих тензодатчиков может быть проведена в зависимости от величины тангенциальной силы, тогда кривая 6 на фнг.4 дает в калодый момент времени действительное значение тангенциальной силы F/j. Тензорезисторы 5 для регистрации реакции вала I нак геены параллельно оси вала, причем рабочий и компенсационный датчики диаметрально противоположны (фиг.З. Величина сигнала от этих тензорезисторов при одной и той же величине силы, действующей на вал, изменяется в зависимости от угла действия силы относительно плоскости, проходящей через центры тензорезисторов и вала. Если направление действия силы лежит в указанной плоскости, величина сигнала, подаваемого от тензорезистора, максимальна; если направление действия силы перпендикулярно этой плоскости то величина сигнала равна нулю. При этом изменение величины сигнала пропорционально косинусу угла между направлением действия силы и диаметральной плоскостью, проходящей через центры тензорезисторов.
Для определения направления основных взаимно перпендикулярных плоскостей, положения тензорезисторов 5 при вращении вала на обтюраторе 6 устанавливают метки, которые обеспечивают на осциллограмме характерный сигнал. Точки а и а на кривой « фиг.4 дают направления соответственно для максимальных и нулевых отклонений сигнала. Полученный, например
в момент а сигнал принимается за начальное положение накатного ролика. От этого положения отсчитывается угол поворота t накатного ролик в процессе накатьюания. В этот же момент времени по кривой г. (фиг.4 получают действительное значение радиальной силы F на осциллограмме при условии, что ось накатываемого изделия лежит в диаметральной плоскости, проходящей через центры тензорезисторов 5. Это наблюдается, если совмещен угол поворота накатного ролика Ч и угол поворота накатываемого изделия (фиг.З), т.е.
имеется равенство tf - 0. В общем случае тензорезисторы 3 на алу 1 накатного ролика воспринимают равнодействующую Р,направление которой смещено на угол о1 (фиг.З) относительно направления радиальной силы FP. Поэтому в момент, когда - Чу 90°, т.е. когда диаметральная плоскость, проходящая через центры тензорезисторов 5, перпендикулярна плоскости, проходящей через ось накатного ролика и ось накатьгааемого издс:п-1я, тенэорезисторы 5 регистрируют величину тангенциальной силы F. Величина этой силы сравнивается с.тангенциальной силой F, полученной с помощью тензорезпсторов 4. Кривая г ,регистрирующая реакцию вала накатного pojniKa, пересекает нулевую линию Э в момент, когда Ч + ci. Это дает возможность определить угол з между равнодействующей F и радиа пьной F силами. Далее по известным тригонометрическим соотношениям определяют действительные величины всех сил, действующих на накатной ролик в процессе накатьшания. Например, д)1Я определения величины равнодействующе п любой момент времени используют зависимость
м
,,f,}co,oLf.
(,
со 5
где F - отклонение кривой 2 реакции вала накатного ролмча от нулевой линии q (фиг.4) в момент, когда накатываемое, изделие находится на угле поворота Ч2и., накатной ролик понернулся на угол Ч. Таким образом, можно получить действительную величину равнодействующей сил накатывания при любом взаимном положении накатного ролика и сегмента. Для опре.деленпя действительной величины радиальной силы используют зaвиcи iocть F ,j Fcos с.М
.
а для определения дейст s(Y -V. ) V im 2м/
витальной велич(иы тангенциальной силы с использованием кривой реакции
Р.,Ч-,
.А
л
вала -F ::FSinotM
-V )
(
L
:os
Гм :2ЛА/
Если необходимо определить характер изменения соотношения тангенциальной и радиальной составляющей, увеличившот число тензорезнсторов для регистрац1-п1 реакции вала накатного ралика и располагают ifx попарно, как показано ранее, в различных диаметральных плоскостях, смещенных относительно друг друга на углы, необходимые д)1Я получения требуемой точности.
Предлагаемый способ по сравнению с базовым объектом, который принят
за прототип, дает возможность повысить достоверность определения усилий при накатьшании резьбы благодаря определению как действительных величин сил, действующих в системе инструмент-станок, так и их направления в каждый момент времени.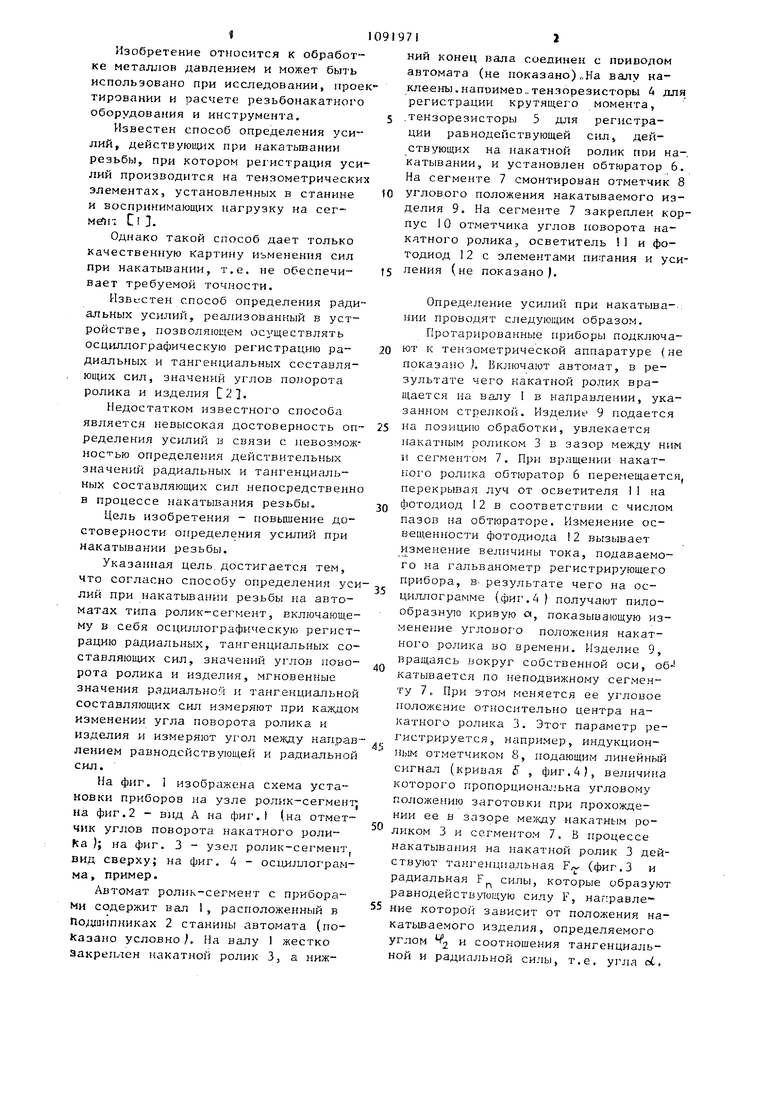
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ НАКАТЫВАНИЯ РЕЗЬБЫ | 1990 |
|
RU2036045C1 |
| Устройство для определения усилий при накатывании резьбы на автомате типа ролик-сегмент | 1983 |
|
SU1349860A1 |
| Устройство для накатывания резьбы | 1983 |
|
SU1166873A1 |
| Способ накатывания цилиндрической резьбы | 1987 |
|
SU1763075A1 |
| Устройство для накатывания резьб | 1990 |
|
SU1722672A1 |
| Двухроликовый резьбонакатнойАВТОМАТ | 1979 |
|
SU841741A1 |
| Способ накатывания резьбовых профилей двумя роликами | 1989 |
|
SU1726100A1 |
| СПОСОБ НАКАТЫВАНИЯ РЕЗЬБЫ РОЛИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2184008C2 |
| СПОСОБ НАКАТЫВАНИЯ НАРУЖНЫХ КОНИЧЕСКИХ РЕЗЬБ | 2008 |
|
RU2371273C1 |
| РЕЗЬБОНАКАТНЫЙ ИНСТРУМЕНТ ДЛЯ НАКАТЫВАНИЯ НАРУЖНЫХ КОНИЧЕСКИХ РЕЗЬБ | 2008 |
|
RU2384382C1 |
СПОСОБ ОПРЕДЕЛЕНШ УСИЛШ ПРИ НАКАТЫВАНИИ РЕЗЬБЫ НА АВТОМАТАХ ТИПА FOJUIK-CEraEHT, включающий в себя осциллографическуга регистраш-1Ю радиальных, тангенциальных составляющих сил, значений углов поворота ролика и изделия, о .т л и ч а ю щ и йс я тем, что, с целью повышения достоверности определе1П1я уевший при накатьшании резьбы, мгновенные значения радиальной и тангенциальной составляющих сил измеряют при каждом изменении угла поворота ролика и изделия и измеряют угол между направлением равнодействующей и радиальной сил-.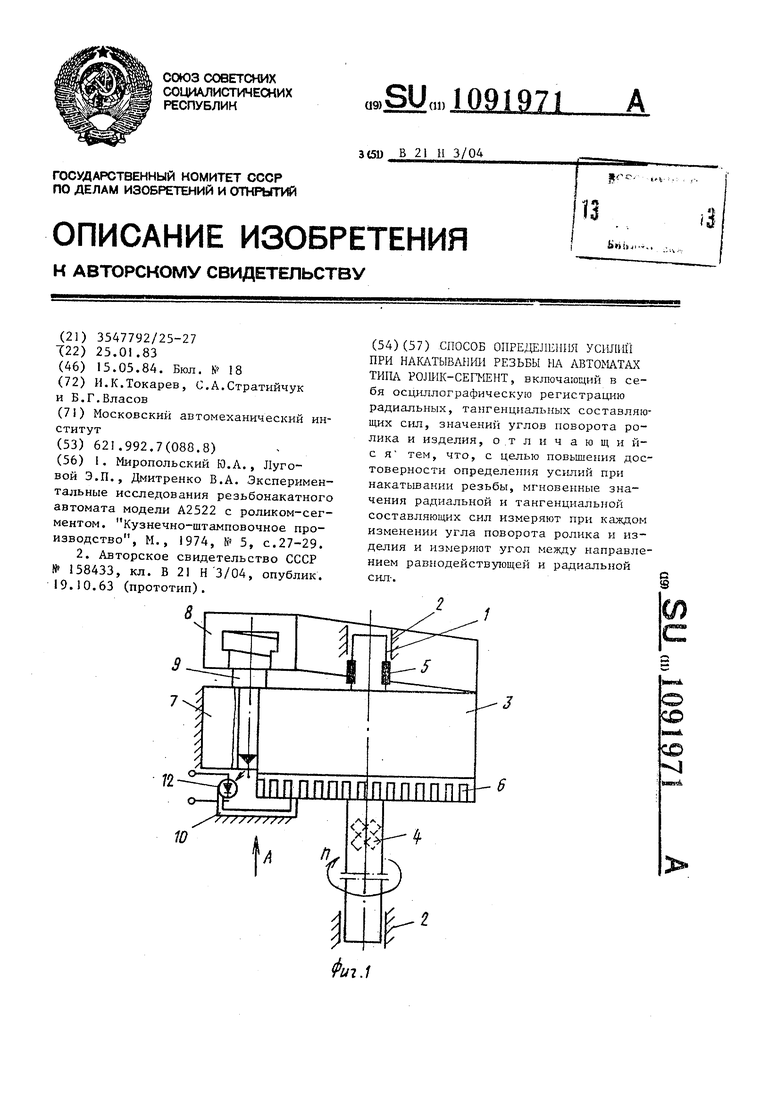
Фт.З
Fn | л/ws л/vw лAлллл л л r л
Фиг.If.
o( a
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Миропольский Ю.А., Луговой Э.П., Дмитренко В.А | |||
| Платформа для перевозки длинных и тяжелых предметов по трамвайным путям | 1925 |
|
SU2522A1 |
| Кузнечно-штамповочное производство, М., 1974, И 5, с.27-29 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| 0 |
|
SU158433A1 | |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
