Изобретение относится к пиевматическил исполнительным механизмам и может быть ис юльзовано в качестве силового привода в транспортных устройствах технологического оборудования, в частности в робототехнических системах. Известен следящий пневматический привод, содержащий исполнительный цилиндр с установленным в нем поршнем со HJTOKOM с образованием рабочих полостей, систему управления и модель-наблюдатель Люенбергера по положению штока 1. Однако известный привод характеризуется недостаточно высокой статической точностью, обусловленной трением в уплотнениях штока и поршня. Известен бесштоковый позиционный магнитопневматический привод, содержащий цилиндр с обоймой и установленным в нем поршнем с образованием рабочих полостей, два постоянных магнита, размещенных на поршне и обойме, неподвижно закрепленной на основании, систему управления 2. Недостатком известного магнитопневматического привода является невысокая статическая точность позиционирования, обусловленная конфигурацией рабочих плоскостей магнитов. Кроме того, динамические характеристики не отвечают поставленным задачам. Цель изобретения - повышение точности позиционирования и улучшения динамических характеристик. Поставленная цель достигается тем, что бесштоковый позиционный магнитопневматический привод, содержащий цилиндр с обоймой и установленным в нем поршнем с образованием рабочих юлостей, два постоянных .магнита, размещенных на поршне и обойме, неподвижно закрепленной на основании, систему упраЕ ления, снабжен моделью-наблюдателем Люенбергера по положению цилиндра, связанной с системой управления, а поверхности взаимодействия магнитов выполнены с острыми кромками, вершины острых углов которых расположены навстречу один другому в одной плоскости. На чертеже представлена принципиальная схема привода. Бесштоковый позиционный магнитопневматический привод содержит цилиндр 1 с крышками 2 и 3 с рабочими каналами 4, обоймой 5, неподвижно зарепленной на основании 6, и установленным в цилиндре 1 поршнем 7 с образованием рабочих полостей 8 и 9, герметизация которых осуществля irt11 ется оболочками 10 и I, два постоянных магнита 12 и 13, изготовленных из высококоэрцитивных и высокоэнергоемких редкоземельных магнитных материалов, систему 14 управления, связанную с пневмораспределителем 15, например, типа струйная трубка, подключенным к рабочим полостям 8 и 9. Кроме того, привод снабжен модельюнаблюдателем Люенбергера 16, на которую заводится задающий сигнал и сигнал отдатчика положения цилиндра (не показан). Поверхности 17 и 18 взаи.модействия магнитов 12 и 13 выполнены с острыми кромками 19 и 20. Привод работает следуюшим образо.м. При поступлении на систему 4 управления через специальную модель-наблюдатель Люенбергера 16 задающего сигнала пневмораспределитель 15 отрабатывает сигнал и сообщает одну из рабочих полостей, например 9, с питанием, а рабочую полость 8 с атмосферой (сливом). В результате силового взаимодействия постоянных магнитов 12 и 13 поршень 7 остается неподвижньЕм, а цилиндр-1 с крышками 2 и 3 под действие.м перепада давления в рабочих полостях 8 и 9 начинает перемещаться влево. При этом оболочка И расправляется, оболочка 10 собирается в рабочих полостях 9 и 8, препятствуя при этом возникновение утечек и перетечек воздуха. Консистентная смазка, расположенная между внутренней поверхностью цилиндра 1 и оболочками 10 и 11, позволяет снизить силы трения. Зазор.между цилиндром 1 и порщнем 7 выбирается меньшим толщины герметизирующих оболочек 10 и 11 с целью предотвращения заклинивания привода при зашемлении оболочек. Снижение сил трения уменьшает зону нечувствительности в приводе при позиционировании, что, в свою очередь, повышает точность. По мере приближения к заданной позиции происходит уменьшение разности между величиной задающего сигнала и сигнала, поступающего от датчика положения, в результате чего пневмораспределитель 15 начинает возврац.1аться в исходное среднее по,:юже1ще, уменьшая тем самым перепад давления в рабочих полостях 8 и 9. Кроме задающего воздействия и сигнала от датчика положения в систему 14 управления поступают сигналы, пропорциональные скорости и ускорению лхвижения гильзы, генерируе.мые моделью-наблюдателем Люенбергера, которая .моделирует динамику работы привода и позволяет получить сигналы скорости и ускорения движения цилиндра 1 без при.менения соответствующих датчиков или устройств дифференцирования. Остановка цилиндра 1 в заданной позиции происходит при равенстве задающего сигнала и сигнала, поступающего с датчика положения. При этом давление воздуха в рабочих полостях 8 и 9 выравнивается за счет установки пневмо1ГГ . распределителя 15 в исходное положение (см. чертеж). Выполнение острых кромок 19 и 20 у по-v:тoянныx магнитов 12 и 13 позволяет получить лучшую статическую точность привода, так как градиент магнитных сил, действующих на поршень 7, в этом случае выше, чем у магнитов с тупыми кромками, однако ухудщает динамическую точность. Введение в привод специальной модели-наблю-чается в упрощении конструкции, поскольку
дателя Люенбергера, составленной с уче-не требуется применение соответствующих
том острых кромок 19 и 20 магнитов 12 и 13датчиков скорости и ускорения или устройств
позволяет улучщить динамические характе-дифференцирования при обеспечении высористики привода при его позиционировании.кой статической и динамической точности
Технико-экономическая эффективность отпривода, позволяющей расширить область
применения предложенного привода, заклю-применения указанного привода.
1092310
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесштоковый позиционный магнитопневматический привод | 1990 |
|
SU1732010A1 |
| Пневматический позиционный привод | 1985 |
|
SU1359502A1 |
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| БЕСШТОКОВЫЙ ПРИВОД | 1991 |
|
RU2054133C1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906665A1 |
| СПОСОБ ОЦЕНКИ ВНЕШНЕЙ СИЛЫ, ДЕЙСТВУЮЩЕЙ НА ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2709707C2 |
| Способ управления позиционным пневмоприводом и позиционный пневмопривод для его осуществления | 1988 |
|
SU1596143A1 |
| Система синхронизации скорости поршней силовых цилиндров | 1979 |
|
SU770741A1 |
| Пневмогидравлический цифровой позиционный привод | 1980 |
|
SU906664A1 |
БЕСШТОКОВЫЙ ПОЗИЦИОННЫЙМАГНИТОПНЕВМАТИЧЕСКИЙ ПРИВОД, содержаш,ий цилиндр с обоймой и установленным в нем поршнем с образованием рабочих полостей, два постоянных магнита, размешенных на поршне и обойме, неподвижно закрепленной на основании, систему управления, отличающийся тем, что, с целью повышения точности позиционирования и улучшения динамических характеристик, привод снабжен моделью-наблюдателем Люенбергера по положению цилиндра, связанной с системой управления, а поверхности взаи.модействия магнитов выполнены с острыми кромками, вершины острых углов которых расположены навстречу один другому в одной плоскости. со ГЧ5 СО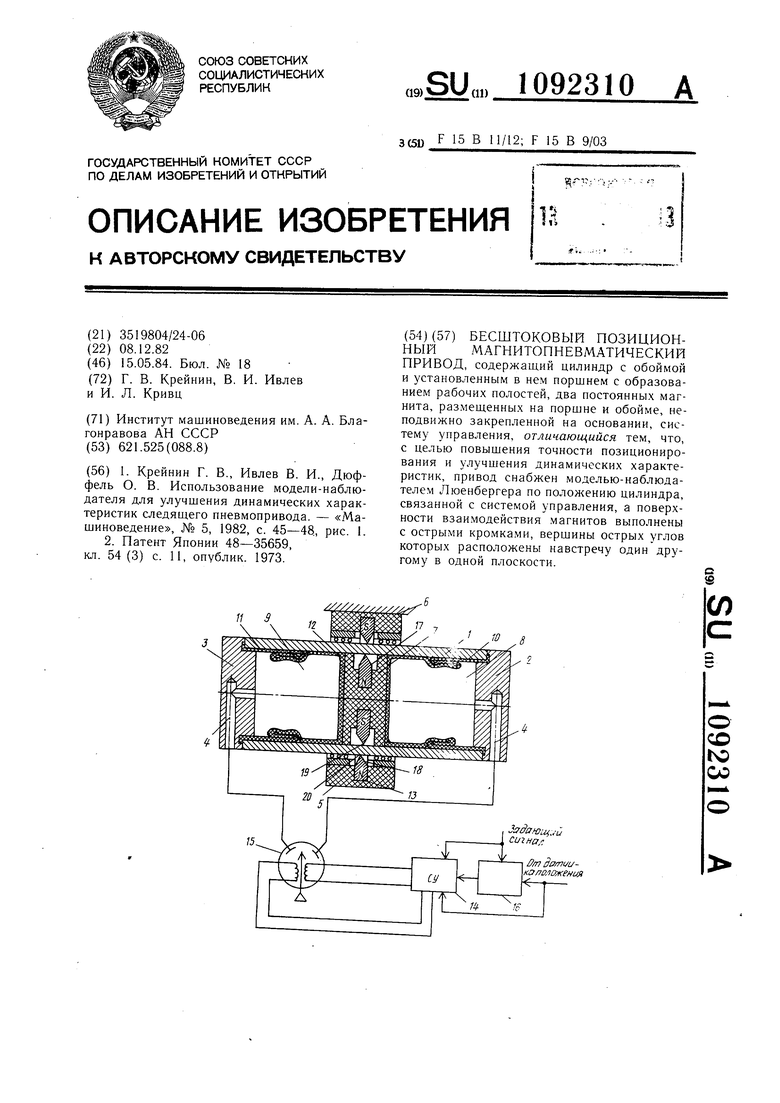
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Крейнин Г | |||
| В., Ивлев В | |||
| И | |||
| , Дюффель О | |||
| В | |||
| Использование моделинаблюдателя для улучшения динамических харак- «Материстик следяш,его пневмопривода | |||
| шиноведение, № 5, 1982, с | |||
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
