сд
со
05 4ib
оо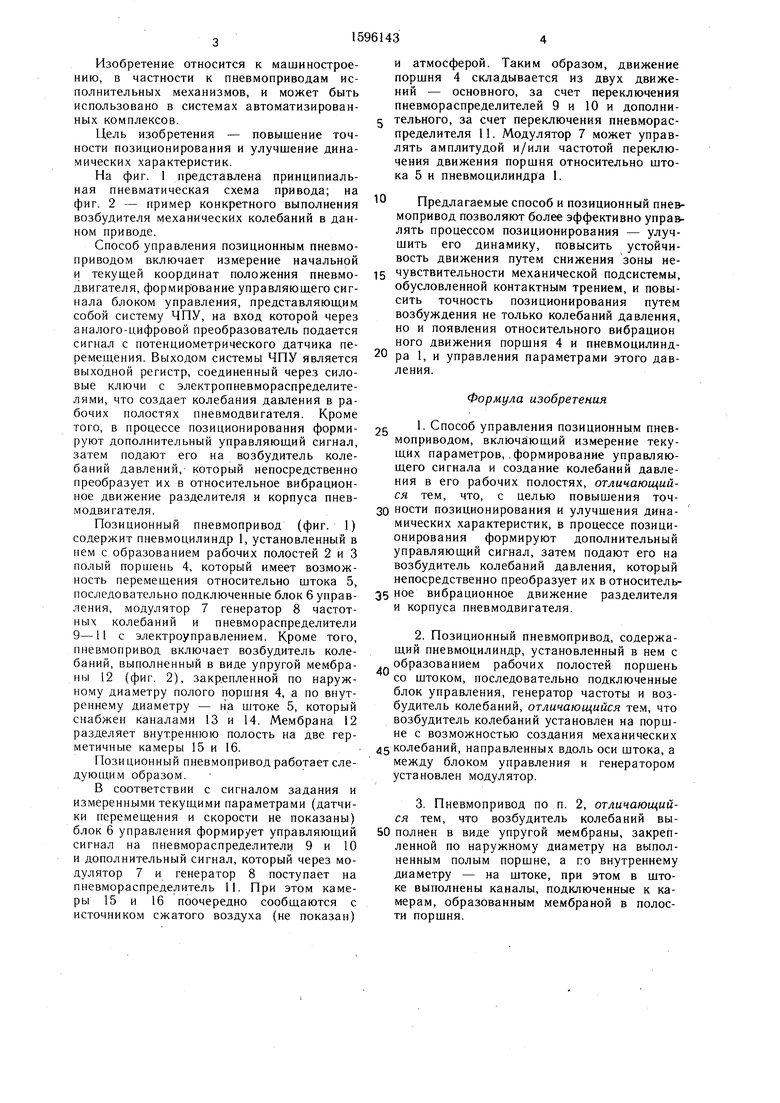
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционный пневмопривод | 1986 |
|
SU1359503A1 |
| Позиционный пневмопривод | 1989 |
|
SU1642100A1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| Позиционный пневмопривод | 1986 |
|
SU1418511A1 |
| Позиционный пневмопривод | 1988 |
|
SU1534222A1 |
| Позиционный пневмопривод | 1987 |
|
SU1481501A1 |
| Позиционный пневмопривод | 1981 |
|
SU1044845A1 |
| Двухотсчетный позиционный пневмопривод | 1984 |
|
SU1231283A1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Следящий позиционный пневмопривод | 1983 |
|
SU1110946A1 |
Изобретение может быть использовано в системах автоматизированных комплексов. Цель изобретения - повышение точности позиционирования и улучшение динамических характеристик. Способ управления позиционным пневмоприводом включает измерение текущих параметров, формирование управляющего сигнала, создание колебаний давления в его рабочих полостях, при этом в процессе позиционирования формируют дополнительный управляющий сигнал, подают его на возбудитель колебаний давления, который непосредственно преобразует их в относительное вибрационное движение в данном случае поршня 4 и пневмоцилиндра 1. Возбудитель колебаний м.б. выполнен в виде упругой мембраны 12, установленной в полом поршне 4, имеющем возможность перемещения относительно штока 5. 2 с.п. 13 ф-лы, 2 ил.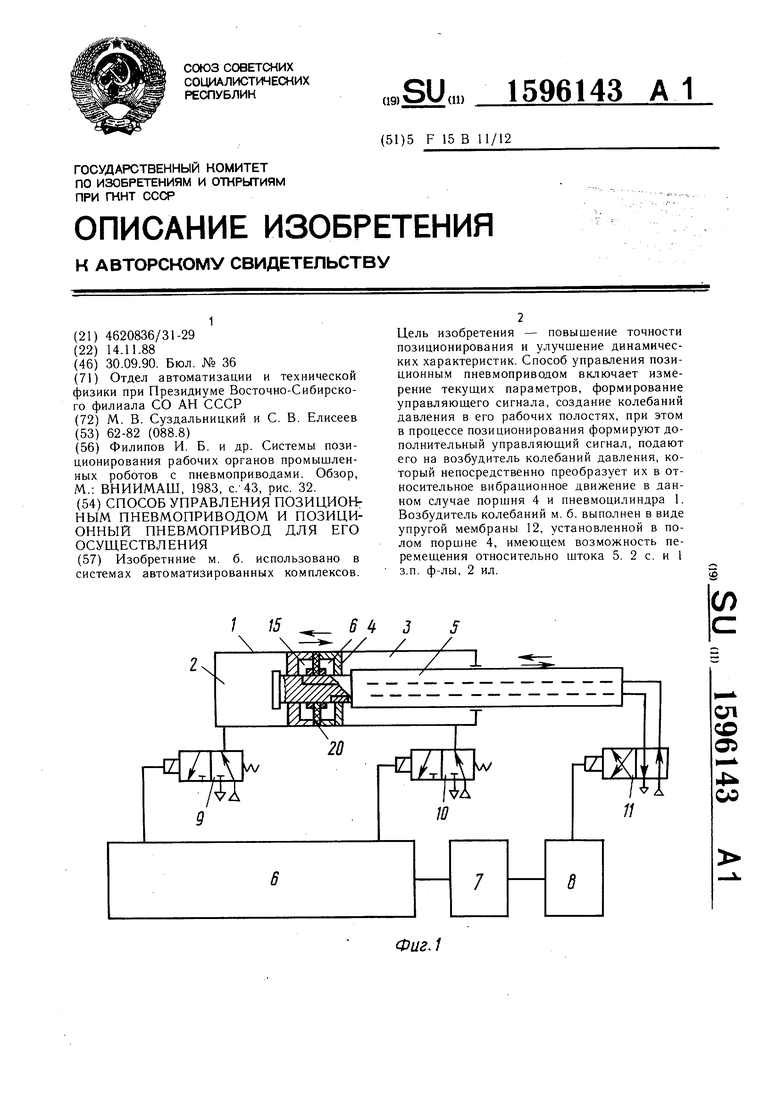
Фиг.1
Изобретение относится к машиностроению, в частности к пневмоприводам исполнительных механизмов, и может быть использовано в системах автоматизированных комплексов.
Цель изобретения - повышение точности позиционирования и улучшение динамических характеристик.
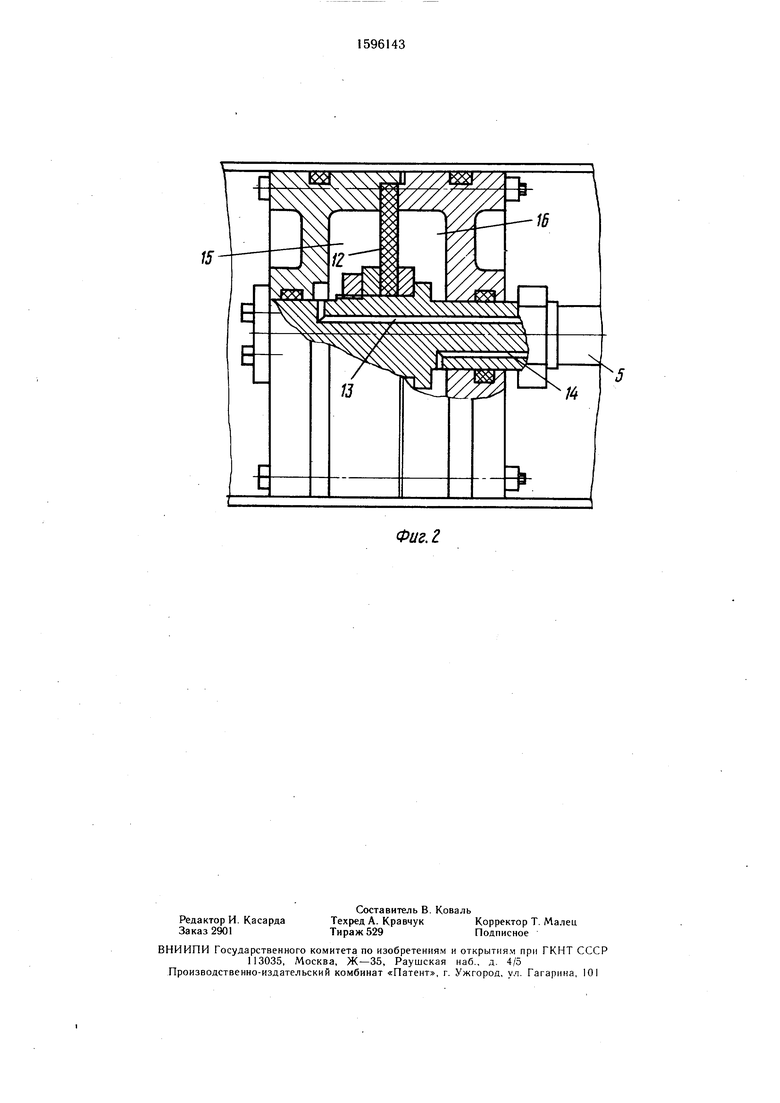
На фиг. 1 представлена принципиальная пневматическая схема привода; на фиг. 2 - пример конкретного выполнения возбудителя механических колебаний в данном приводе.
Способ управления позиционным пневмоприводом включает измерение начальной и текуш,ей координат положения пневмо- двигателя, формирование управляющего сигнала блоком управления, представляющим собой систему ЧПУ, на вход которой через аналого-цифровой преобразователь подается сигнал с потенциометрического датчика перемещения. Выходом системы ЧПУ является выходной регистр, соединенный через силовые ключи с электропневмораспределите- лями, что создает колебания давления в рабочих полостях пневмодвигателя. Кроме того, в процессе позиционирования формируют дополнительный управляющий сигнал, затем подают его на возбудитель колебаний давлений, который непосредственно преобразует их в относительное вибрационное движение разделителя и корпуса пневмодвигателя.
Позиционный пневмопривод (фиг. 1) содержит пневмоцилиндр 1, установленный в нем с образованием рабочих полостей 2 и 3 полый поршень 4, который имеет возможность перемещения относительно штока 5, последовательно подключенные блок 6 управления, модулятор 7 генератор 8 частотных колебаний и пневмораспределители 9-11 с электроуправлением. Кроме того, пневмопривод включает возбудитель колебаний, выполненный в виде упругой мембраны 12 (фиг. 2), закрепленной по наружному диаметру полого поршня 4, а по внутреннему диаметру - н а штоке 5, который снабжен каналами 13 и 14. Мембрана 12 разделяет внутреннюю полость на две герметичные камеры 15 и 16..
Позиционный пневмопривод работает следующим образом.
В соответствии с сигналом задания и измеренными текущими параметрами (датчики перемещения и скорости не показаны) блок 6 управления формирует управляющий сигнал на пневмораспределители 9 и 10 и дополнительный сигнал, который через модулятор 7 и генератор 8 поступает на пневмораспределитель 11. При этом камеры 15 и 16 поочередно сообщаются с источником сжатого воздуха (не показан)
и атмосферой. Таким образом, движение поршня 4 складывается из двух движений - основного, за счет переключения пневмораспределителей 9 и 10 и дополни- тельного, за счет переключения пневморас- п редел и те л я 11. Модулятор 7 может управлять амплитудой и/или частотой переключения движения поршня относительно штока 5 и пневмоцилиндра 1.
Предлагаемые способ и позиционный пневмопривод позволяют более эффективно управлять процессом позиционирования - улучшить его динамику, повысить устойчивость движения путем снижения зоны нечувствительности механической подсистемы, обусловленной контактным трением, и повысить точность позиционирования путем возбуждения не только колебаний давления, но и появления относительного вибрацион ного движения поршня 4 и пневмоцилиндра 1, и управления параметрами этого давления.
Формула изобретения
образованием рабочих полостей порщень со штоком, последовательно подключенные блок управления, генератор частоты и возбудитель колебаний, отличающийся тем, что возбудитель колебаний установлен на поршне с возможностью создания механических
колебаний, направленных вдоль оси штока, а между блоком управления и генератором установлен модулятор.
Фиг.1
| Филипов И | |||
| Б | |||
| и др | |||
| Системы позиционирования рабочих органов промышленных роботов с пневмоприводами | |||
| Обзор, М.: ВНИИМАШ, 1983, с | |||
| Зубчатое колесо со сменным зубчатым ободом | 1922 |
|
SU43A1 |
| Способ образования коричневых окрасок на волокне из кашу кубической и подобных производных кашевого ряда | 1922 |
|
SU32A1 |
