Изобретение относится к системам автоматического управления и может быть использовано в различных отраслях проьаошленности. I Известна система автоматического управления, содержащая объект управления, устройство сравнения, сумматор и параллельно подключенные усилитель и интегратор, реализующая про порционально-интегральный закон управления tlj. Недостатком системы является то, что в ней не учитывается скорость изменения ошибки и не производится автоматическая корректировка параметров регулятора. По основному авт.св. № 705417 известна система, содержащая последова тельно соединенные блок пропорционального регулирования, первый ключ сумматор, исполнительный блок, объект сравнения, выход которого соединен со входами блока интегрального регулирования, блока дифференцирования, блока умножения и блока контро ля сигнала ошибки, первый выход кото рого соединен с входом блока изменения пропорциональной составляющей и управляющим входом второго ключа, второй выход - с входом блока изменения интегральной составляющей и управляющим входом первого ключа, третий выход - с управляющим входом блока контроля знака, первый выход которого соединен с входом блока изменения пропорциональной составляющей, второй выход - с управляюдщм входом первого ключа, а вход - с выходом блока умножения, причем выход блока дифференцирования соединен с входами блока умножения и блока конт роля модуля, выход блока изменения пропорциональной составляющей соединен с вторым входом блока пропорционального регулирования, выход блока изменения интегральной составляющей со вторым входом блока интегрального -регулирования, выход которого через второй ключ соединен со вторым входом блока сумматора t23. Система осуществляет управление по сигналу ошибки регулирования (Е, определяемой в блоке сравнения. Блок контроля сигнала ошибки осуществляет анализ значения ошибки по условию (При выполнении даноого условия система реализует пропорционально61интегральный закон управления. Кроме того, блок контроля модуля осуществляет анализ модуля производной ошибки. Если f I (3 , то блок контроля знака в зависимости от знака величины отключает пропорциональную составляющую либо изменяет значение ее коэффицента пропорциональности . Если , то из закона управления исключается пропорциональная составляющая и управление осуществляется в интегральном режиме. Если tei 2 то отключается выход блока интегрального регулирования и управление осуществляется в пропорциональном режиме. Величины с , , , 4 выбираются в зависимости от свойств объекта управления и требований к системе. Недостатком указанной системы является то, что при переключении в режим пропорционального регулирования (при «Г ) S блоке интегарльного регулирования продолжается интегрирование входной переменной, выходной сигнал возрастает и может достигнуть большой величины, что в момент повторного включения блока ключом 9 приведет к резкому ухудшению качества управления или даже потере устойчивости системы. Цель изобретения - повышение качества управления. Поставленная цель достигается тем, что в систему управления, содержащую последовательно соединенные блок пропорционального регулирования, первый ключ, сумматор, исполнительный блок, объект управленкя, блок сравнения,, выход которого соединен со входами блока интегрального регулирования, блока пропорционального регулирования, блока дифференцирования, блока умножения и блока контроля сигнала ошибки, первый выход которого соединен с входом блока изменения пропорциональной составляющей и управляющим входом второго ключа, второй выход - с входом блока изменения интегральной составляющей и управляющим входом первого ключа., а третий выход - с управляющим входом первого ключа, а третий выход - с управляющим входом блока контроля знака, первый выход которого соединен с входом блока изменения пропорциональной составляющей, второй выход - с управляюшрм входом первого ключа, а выход - с выходом блока умножения, причем выход блока диффе-т ренцирования соединен с входами блока умножения и блока контроля модуля выход блока изменения пропорциональной составляющей соединен со вторым входом блока пропорционального регулирования, выход блока изменения инт гральной составляющей - со вторым входом блока интегрального регулирования, выход которого через второй ключ соединен со вторым входом блок сумматора, дополнительно включен ком мутирующий блок,первый и второй выходы которого соединены соответственно с первым и третьим входами блока интегрального регулирования, вход - с вы ходом блока сравнения, а управляющий вход - с первым выходом блока контроля сигнала ошибки. На чертеже изображена блок-схема предлагаемой системы управления. Система содержит объект управлбния 1, исполнительный блок 2, блок сравнения 3, блоки пропорционального 4 и интегрального 5 регулирования, сумматор 6, первый ключ 7, блок изменения пропорциональной составляющей 8, второй ключ 9, блок изменения интегральной.составляющей 10, блоки дифференцирования 11 и умножения 12, блоки контроля сигнала ошибки 13, модуля 4, знака 15, а также коммутирующий блок 16. В предлагаемой системе управления последовательно соединён блок пропорционального регулирования 4, первый ключ 7, сумматор 6, исполнительный блок 2, объект управления 1, блок сравнения 3, выход которого соединен с входом блока пропорционал ного регулирования 4 и через коммутирующий блок 16 - со входом блока интегрального регулирования 5, входа ми блока дифференцирования 11, блока умножения 12 и блока контроля сигнала опшбки 13, первый выход которого соединен со входом блока изменения пропорциональной составляющей 8, управляющими входами второго ключа 9 и коммутирующего блока 16, второй выход - с входом блока изменения интегральной составляющей 10 и.управляю1цим входом первого ключа 7, а третий выход - с управляю1дим входом блока контроля знака 15, первый выход которого соединен с входом блока изменения пропорциональной составляю 614 щей 8, второй выход - с управляющим входом первого ключа 7, а.вход с выходом блока умножения 12. Выходблока дифференцирования 1I соединен с входами блока умножения 12 и блока контроля модуля 14, выход блока изменения пропорциональной составляющей 8 соединен со вторым входом блока пропорционального регулирова ния 4, выход блока изменения интегральной составляющей 10 - со вторым входом блока интегрального регулирования 5, выход которого через второй ключ 9 соединен со вторым входом сумматора 6, второй выход коммутирующего блока I6 соединен с третьим входом блока интегрального регулирования 5. Система работает следующим образом. В блоке 3 сравнения определяется ошибка регулирования. По сигналу ошибки формируются две составляющие управляющего сигнала: Up k пропорциональная, формируемая блоком 4; U k lEcJt - интегральная, формируемая блспком 5. Суммируясь в сумматоре 6., управляющий сигнал подается на объект управления I через исполнительный блок 2. Блок 13 осуществляет анализ ошибки. Если I Е I -, , то ключом 7 отключается пропорциональная составляющая и управление осуществляется в интегральном режиме. Если выход блока интегрального регулирования отключат ется ключом 9, а вход - коммутирующим блоком 16. Кроме того, из коммутирующего блока 16 поступает сигнал для сброса информации блока интегрального регулирования и регулирование осуществляется в пропорцио нальном режиме. При выполнении условия (1) анализируется модуль производной ошибки блоком 14. При|Е| л блок в зависимости от знака величины 1, определяемой при помощи блоков 11 и 12,отключает пропорциональную составляющую (знак минус ),либо устанавливает значение коэффициента К равное К р (знак плюс), причем . П I Значения коэффициентов К а также величин сГ, , f выбираются в зависимости от свойств объекта управления и требований к системе, Таким образом, в предлагаемой системе управления, принятой за базо- i109246 8ЫЙ объект, при больших значениях ооибок ( регулирование осуществляется в пропорциональном режиме, поскольку интегральная составляюецая в этом случае приводит к раскачи- 5 ванию инерционного объекта, а автоматическое изменение коэффициентов регулирования осуществляется с том величины ошибки и скорости ее изменени {. При этом при малых зна- Ю чеииях ошибки ((f-,) осуществляется регулирование в интегральном 14 режиме с большим коэф4мциентом настройки. В отличие от базового объекта в предлагаемой системе управления при переключении из режима пропорционального в режим пропорционапьноинтегрального регулирования ухудшение качества управления не происходит. Система сохраняет устойчивость. Таким образом, введение коммутирующего блока позволяет повысить качество управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления | 1977 |
|
SU705417A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА КОМБИНИРОВАННОГО РЕГУЛИРОВАНИЯ | 1989 |
|
RU2022313C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1511734A1 |
| Система автоматического регулирования | 1986 |
|
SU1341616A1 |
| Система управления | 1985 |
|
SU1252752A1 |
| Самонастраивающаяся система комбинированного регулирования | 1985 |
|
SU1254433A1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 2016 |
|
RU2616219C1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИФФЕРЕНЦИАЛЬНЫЙ РЕГУЛЯТОР | 2002 |
|
RU2234116C1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
СИСТЕМА УПРАВЛЕНИЯ по авт. св. № 705417, отличающая с я тем, что, с целью повьшения качества управления, она содержит коммутирующий блок, первый и второй выходы которого соединены соответственно с первым и третьим входами блока интегрального регулирования, вход - с выходом блока сравнения, а управляющий вход - с первым выходом блока контроля сигнала ошибки.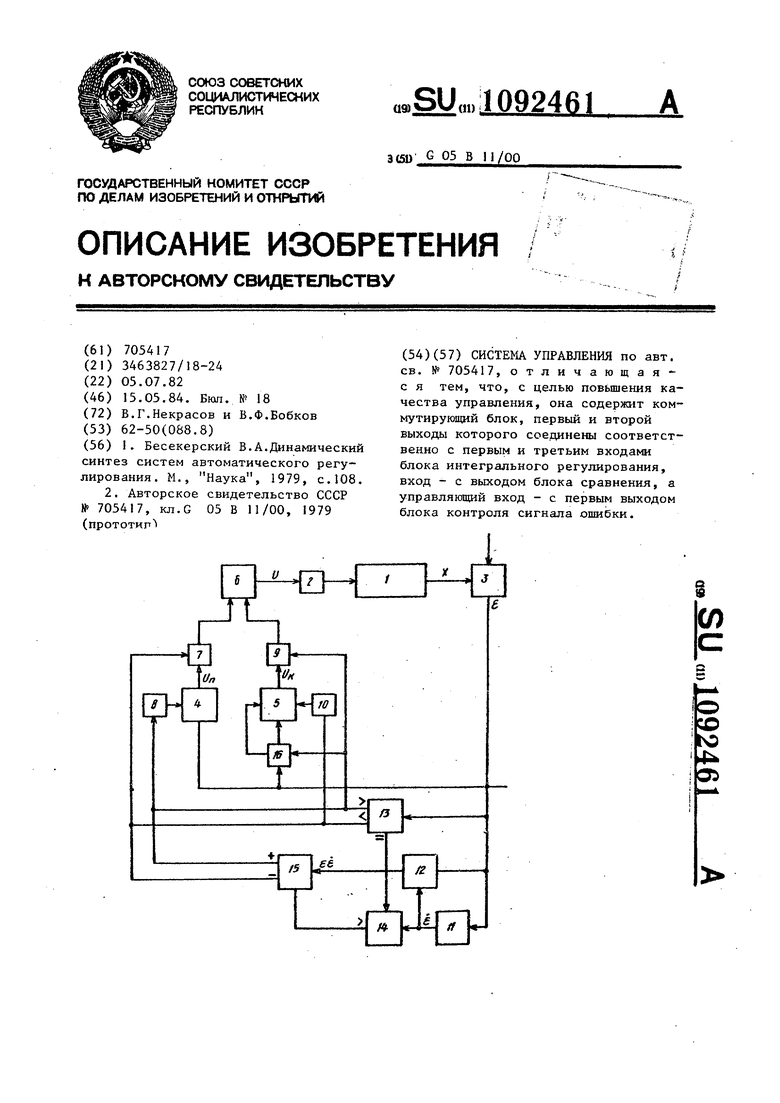
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бесекерский В.А.Динамический синтез систем автоматического регулирования | |||
| М., Наука, 1979, с | |||
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Система управления | 1977 |
|
SU705417A1 |
