Ия()бр1 гемие откосится к гиг:т(млм лр. Г .М,чт1г.|«м ког1) упр)янлення и может Ры- ь ис11(х 1ьч()ваио в ра-зличных отрас71 я X ПрС1М П1 ГИ ННОСТИ .
еЛЬ - ПОПЬПИГННО I OU- )10СТИ .
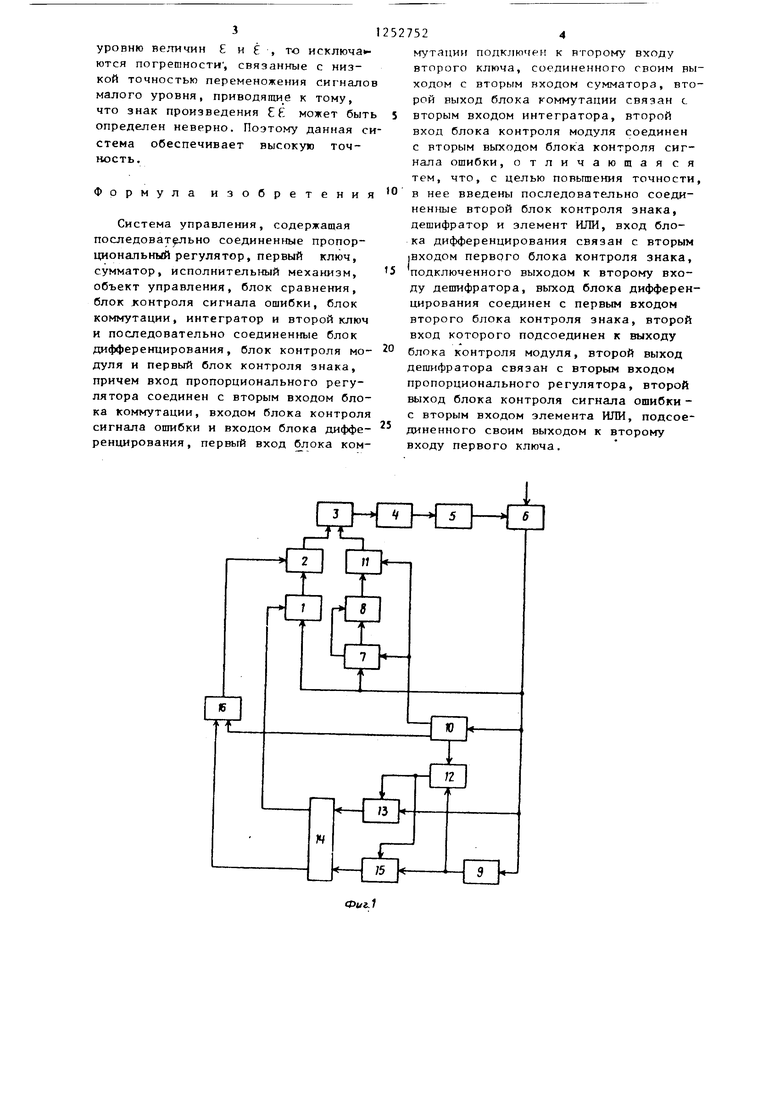
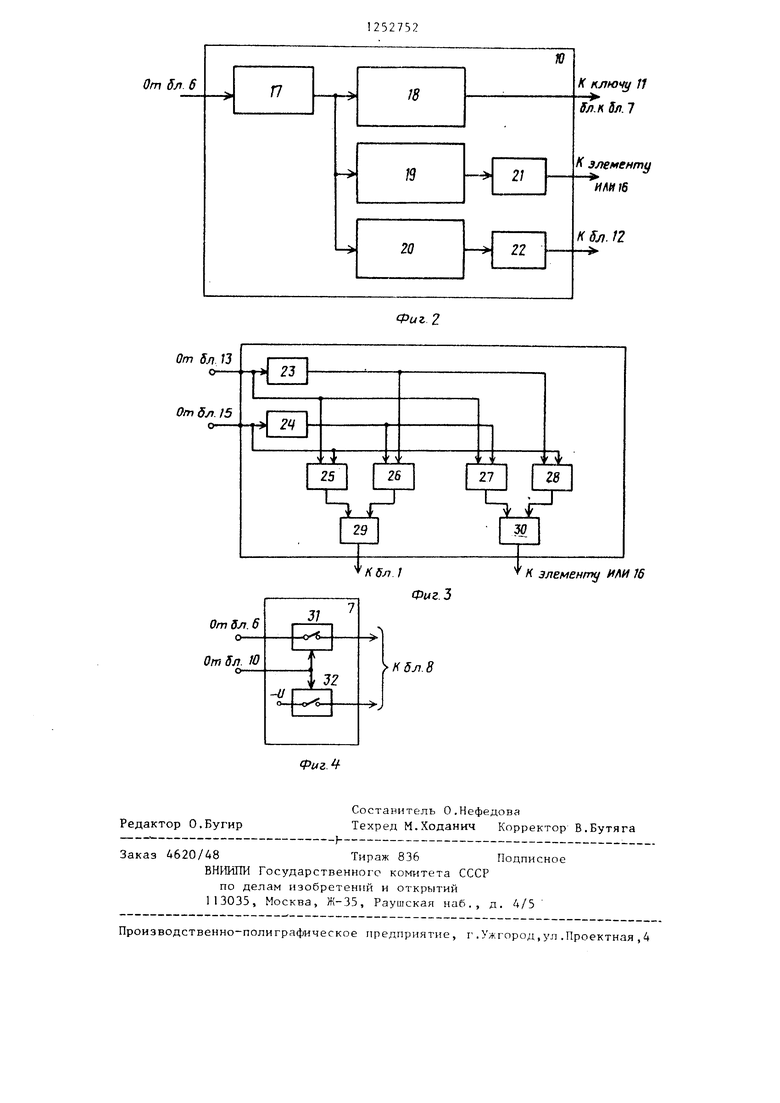
На фиг. юкнаанл блок-схема системы ynpap.jieuHR; ьч фиг. 2 -- функцист- иаль)ая схема блок.ч коичрс ля сигнала 11:11 бт-.:.; на .3 -- функцшша лыыя .:х ; ма лялифритпра: на ({)иг,4 - функ- циональмаи схемл коммутируюи1ег о блока .
Система содержит прсл1:51 Иио1К ии. регулятор 1, пер)зый ключ 2 суммат р ,, ис11ол 1 ительный механизм 4. объект 5 упратшеиия, блок 6 сраниения,, блок 7 коммутация, яитет ратор 8,, блок 9 л.иффрР Ниироваиия, блок 10 контроля снгиа.ла ошибки, второй ключ П., блок 12 коитрсм ш молуля, первый (хпсч 13 Контроля знака, дешифгратор 14, второй блок 15 контроля злака, логический э.лемент ИЛИ 16.
Система раб:г|-ает cjie/iyK uuiM образом .
В 6jioKt 6 сравнения определяется ошибка pej ули5)онания , По сигналу О1ш-1бки фсфмирукп ся две состяипию1Щ1е улравлнкядег о сигнала:
и,. - К Е - пропорциональная, фоу - и
мирусмая регулятором 1
dt
пнтегралт ная (формируемая блокг1 ( 8.
После сумми 1оиания л суммат опе 3 управляюпш сигнал полается на обтг скт 5 упраплемия лерс ч ис11О1П{итель- ный мехаиичм 4.
Блок О of vnif CTHJiHfiT апа.ггиз огаиб- ки. Если (Ь/ - Л , то ключом 2 отклк -- чается лр1Л1ор1П1 Л1а.:;Ы1а.я cot:i /шлятщая и управление осущргтнляетч-я в интчт-- ральном режиме . 1.с,гл1 If,/ л 8 , то выход инте ра1Ч1ра 8 отк.лючается к.лк - чом 11, а 1лод - коммутирующим блоком 7. Кроме I lTO, из коммутирующего блока 7 поступает сигнал ,iui сброса ипформапии интегратора 8 и рс гу.ппро- вание осуществляется в 11 1оп1триионалр)
ном режиме.
1
При ИЫПОЛПС-ЩП) уСЧОНПЯ Ь S I i: : Оу
сие т е ма ;: е ал 11 -. у Р т п о п е; р LU л п а; i ь но - и и тегральь;1-и: -.л-.чн упрг1ичения , Кр. ме того, . 12 коьггроли осуществляет аи -ли t милул 1 ггг;ои:М5олп ;) ошибки. При ; ; , и б.г1(м, 2 F- lasiiir.- мости () чиака петичипм |) к iipi iaет пропорциональную составляющую, либо и нменяет значение ее коэффици- (МГ1 а пропоргшонал ьиости .
Знак яелилины f определяется
при пом(лш1 блоков 13 и 15 и дешифра- ора 14. Если BejTH4MHbi и t имеют 5)а (ноимеш.ые -jHaKli (6 0) , то фор- гп г уется сигнал на втором выходе де- :г1;фра1 ора 14, отклк1чаю11сий (посредС ;ом пог ическогч) лемента ИЛИ 15 и первого ключа 2), пропорциональную ссх тарляющую. Если величи1- ы и П К Ю одноименные знаки (), то формируется сигнал на первом выходе
л.(1 ратора 14, которым устанавлива- е 1ч:я значение К„, равное К,, причем К„ К. Значения коэффициентов К , К,| , К, , а также тнеличин S , о, , и ныби)аются в залисимости от свойств
объекта управления и требований к сиГ-ТОК: .
Система управления реализуется на известных схемных ре1иемиях.
Прсчпорпиональны регулятор 1 реа,пизуется по схеме ycиJЛ тeля с программируемом коэффидиентом усиления , И)ггегратор 8 - по схеме интегратора со «-бросом, блоки 3 и 15 контроля знака - путем последовательного соелинения компаратора с нулевым поро- 1 ом срабаП) и логического элемента И; в- -орой вход которого явля- с гся упраялян1шлм входом блока, блок 12 ко ггроля модуля - путем последона1ельного соединения блока выделения модуля, реализуемого по извест- по;; схеме, компаратс ра с порогом сра- П.з 11, и лсчического элемента П, ртипой котс рого является уп мнлякицим нч( :,с)м блока 12.
ILiiOK 10 копту)оля сигнала ошибки гч. , i уе-1-ся на одном б.иоке 17 выде- Л1 ипя модуля, двух одпопороговых ком- riai -;i i прах Н и 19, одном двухпорого м KoMnajjaTOpe 2(J и двух логических чп1Л-1С Нтах HI 2 и 22 по функдиональ- nofi с хеме, прпь ел-епной на фиг. 2. Де- iiiMiJipaTO) 1Д 1 а 1изуется на логических тлсментах HR 23 и 24, элементах
И 2 :)-28 и элементах И.ПИ 29 и 30 по ,1г; 1кп1 опал5,нпй схем(, приведенной п-1 ф Щ-. 3 . ;лок 7 KOMKfyi ,1дии реа-лизу- - -; -ii лг ух тлек 1 p)ini,ix ключах 31 II 2 ;;ii | 1у11кпионал1,Н1 Г1 схеме, приве UMnir)i на фи г . 4 .
IlocKo. ii,ку п /шгмой системе опре- ;it ie)He ; прцшы f. f осушест- мч. 11 (мл)я малых по
31
уровню величин Е и , то исключав ются погрешности , связанные с низкой точностью переменожения сигналов малого уровня, приводящие к тому, что знак произведения может быть определен неверно. Поэтому данная система обеспечивает высокую точность.
Формула изобретения
Система управления, содержащая последоват ьно соединенные пропорциональный регулятор, первый ключ, сумматор, исполнительный механизм, объект управления, блок сравнения, блок сонтроля сигнала ошибки, блок коммутации, интегратор и второй ключ и последовательно соединеньпые блок дифференцирования, блок контроля модуля и первый блок контроля знака, причем вход пропорционального регулятора соединен с вторым входом блока ко1чмутации, входом блока контроля сигнала ошибки и входом блока дифференцирования, первый вход блока ком10
527524
мутации подключен к второму входу второго ключа, соединенного своим выходом с вторым входом сумматора, второй выход блока коммутации связан с 5 вторым входом интегратора, второй вход блока контроля модуля соединен с вторым выходом блока контроля сигнала ошибки, отличающаяся тем, что, с целью повьтаения точности, в нее введены последовательно соединенные второй блок контроля знака, дешифратор и элемент ИЛИ, вход блока дифференцирования связан с вторым |Входом первого блока контроля знака, подключенного выходом к второму входу дешифратора, выход блока дифференцирования соединен с первым входом второго блока контроля знака, второй вход которого подсоединен к выходу блока контроля модуля, второй выход дешифратора связан с вторым входом пропорционального регулятора, второй выход блока контроля сигнала ошибки - с вторым входом элемента ИЛИ, подсоединенного своим выходом к второму входу первого ключа.
5
0
5
От б/i 6
18
К клю у 11 Ул-К Sfl. 1
Ю
К элементу ИЛ(116
20
Фиг
Редактор О.Бугир
-ЬЗаказ 4620/48Тираж 836 Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретенир и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
Производственно-полиграфическое предприятие, г.Ужгород,ул.Проектная,4
Фиг. Z
К элементу ЛИ J6
К б л. 8
Состаинтель О.Нефедова
Техред М.Ходанич Корректор В.Бутяга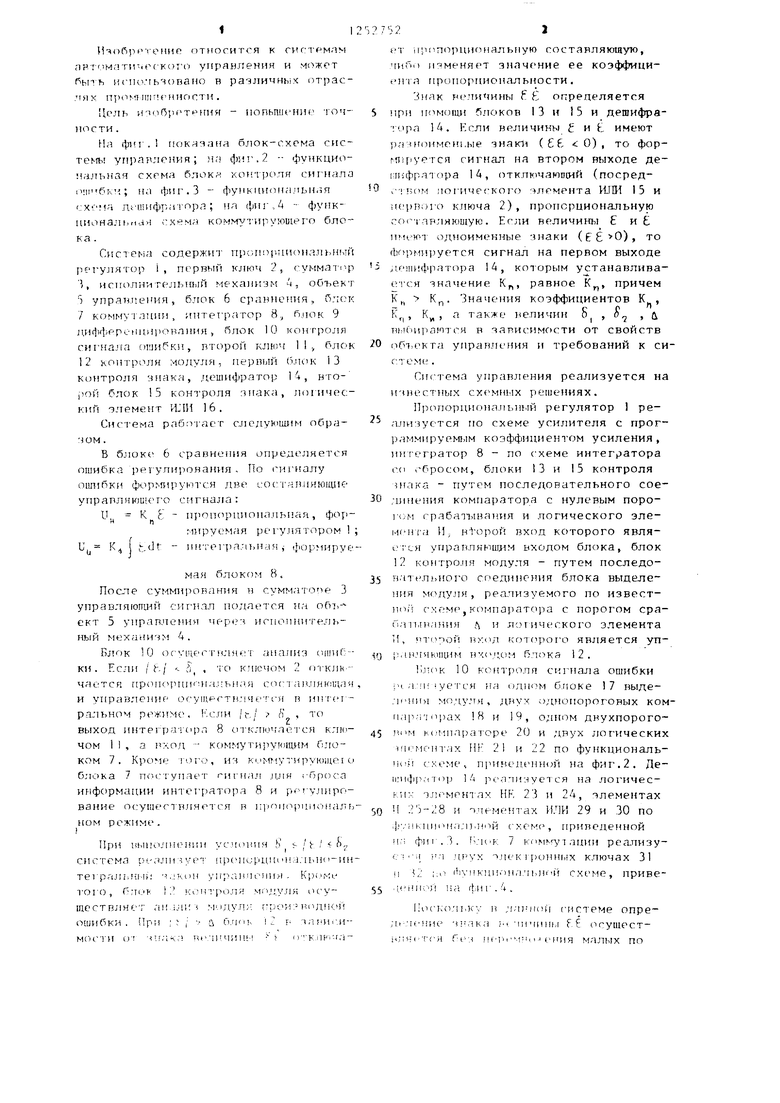
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1987 |
|
SU1432459A1 |
| Система автоматического управления циклом измельчения | 1983 |
|
SU1357072A1 |
| Самонастраивающаяся система комбинированного регулирования | 1987 |
|
SU1509828A1 |
| Система управления | 1977 |
|
SU705417A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Система управления | 1982 |
|
SU1092461A2 |
| Цифровая система управления | 1986 |
|
SU1357917A1 |
| Система автоматического регулирования одностадийным циклом мокрого измельчения | 1982 |
|
SU1255208A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ АСТАТИЧЕСКОГО ОБЪЕКТА | 1996 |
|
RU2103714C1 |
Изобретение относится к системам автоматического управления и может быть использовано в различных отраслях прО1 ппленности. Цель изобретения состоит в повышении точности. Указанная цель достигается тем, что закон управления систеьвя изменяется в зависимости от произведения знаков сигналов ошибки и производной от ошибки, которые вычисляются бея использования блока умножения, имеющего большую погрешность при перемножении малых сигналов. 4 ил. N: СП ю 4J СП ю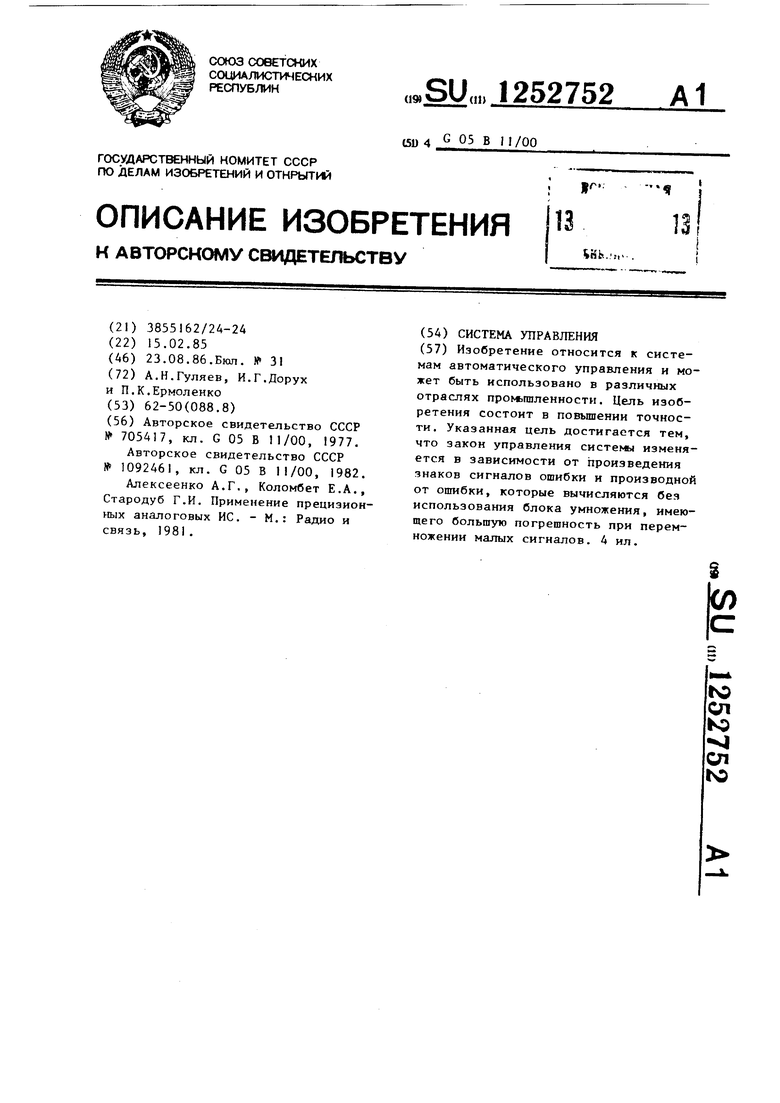
| Система управления | 1977 |
|
SU705417A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система управления | 1982 |
|
SU1092461A2 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Алексеенко А.Г., Коломбет Е.А., Стародуб Г.И | |||
| Применение прецизионных аналоговых ИС | |||
| - М.: Радио и связь, 1981 , | |||
