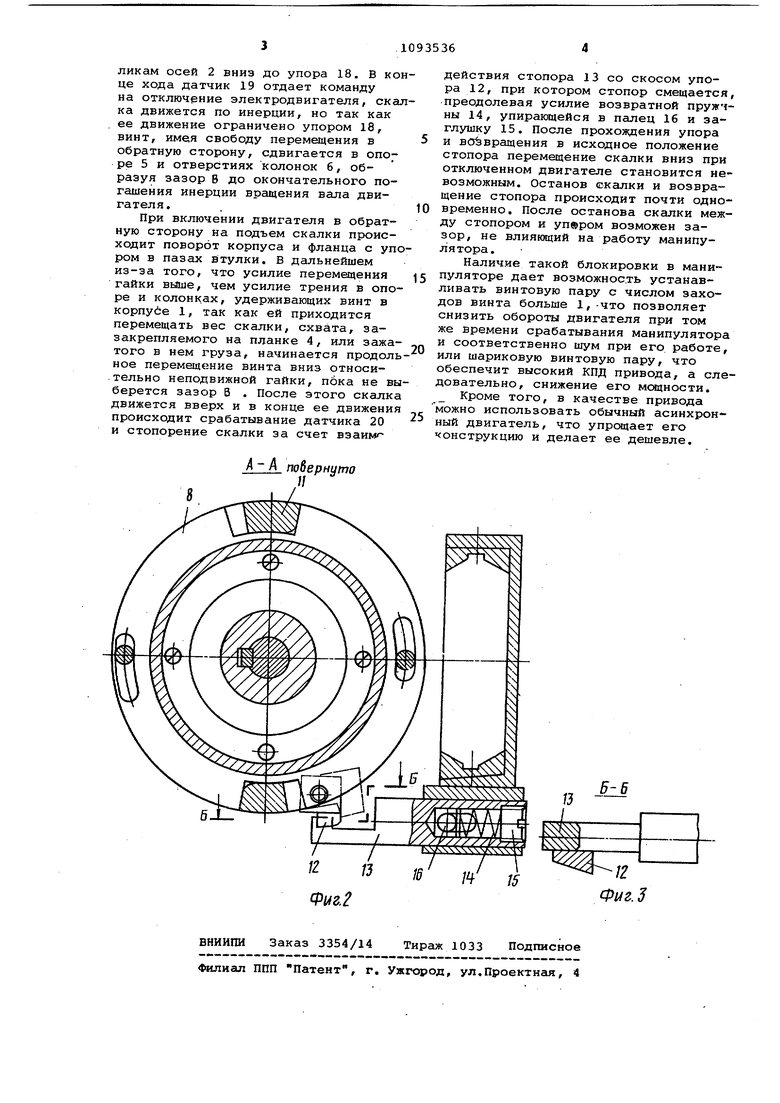
Изобретение относится к машиностроению и может быть использовано при разработке узлов автоматических линий и роботов-манипуляторов. Изйестен манипулятор, содержащий корпус, в котором на направляющих элементах установлена скалка, несущая захват и связанная с электродвигателем через винтовую передачу с демпфирным механизмом, и механизм для фиксации скалки при отключении электродвигателя, В этом манипуляторе самопроизвольное перемещение скалки в моменты, когда выключен при вод, исключается за счет специального электромагнитного фрикционного тормоза и самотормозяшего винта 1 Однако в известном устройстве применение винта с углом подъема винтовой линии, равным углу самоторможения, приводит к снижению КПД передачи, а соответственно к увеличению мощности привода. При этом для получения малого времени срабатывания манипулятора требуется наличие высоких оборотов двигателя, что приводит к шумной работе манипулятора. Кроме того, наличие электромагнитного Фрикционного тормоза усложняет привод и увеличивает его габариты Целью изобретения является упрощение конструкции манипулятора и,сни жение потребляемой мощности. Поставленная цель достигается тем, что в манипуляторе, содержащем корпус, в котором на направляющих элементах установлена скалка, несущая схват и связанная с электродвигателем через винтовую передачу, и механизм для фиксации скалки при отключении электродвигателя в исходном состоянии, электродвигатель установлен с возможностью поворота относительно корпуса, а механизм для фикса ции скалки при отключении электродвигателя выполнен в виде упора, закрепленного на электродвигателе, и подпружиненного стопора, установленного на скалке с возможностью вза взаимодействия с упором. На фиг, 1 изображен манипулятор, в верхнем исходном положении скалки общий вид; на фиг. 2 - разрез А-А на фиг, 1; на фиг. 3 - разрез В-Б на фиг, 2. Манипулятор включает корпус 1, с помощью которого он может монтироваться в состав технологической цепочки для выполнения конкретных операций, связанных с загрузкой или выгрузкой деталей. В корпусе крепят ся оси 2 с роликами для перемещения скалки 3. На скалке закреплена план ка 4, на которой может монтироваться схват. На корпусе 1 с помощью опоры 5 и колонок 6 установлен винт 7, который имеет возможность продол ного перемещения в опоре 5 и в отверстиях колонок для осуществления демпфирования, исключающего заклинивание привода при останове скалки на жестком упоре. Колонки жестко связаны с втулкой 8, Внутри втулки на подшипниках закреплен правый конец винта, с которым соединен вгш электродвигателя 9. Корпус электродвигателя через переходной фланец 10 прикреплен к втулке 8 болтами, которые обеспечивают гарантированный зазор по поверхности контакта. На фланце выполнены выступы 11, которые входят в пазы втулки. Корпус электродвигателя и фланец жестко соединены винтами. На фланце закреплен упор 12. Фланец с упором, а соответственно корпус электродвигателя имеют возможность поворота на угол, ограничиваемый стенками пазов втулки 8, в которые упираются выступы, В скалке 3 установлен стопор 13 через пружину 14 и заглушку 15, взаимодействующий с пальцем 16, закрепленным в скалке. Ход стопора в отверстии скалки ограничивается пазом, через который проходит палец 16. Взаимосвязь скалки с винтом осуществляется через гайку 17, которая через фланец крепится к скалке 3, Ход скалки ограничивается регулируемым упором 18. Отключение привода в крайних положениях происходит с помощью датчиков 19 и 20. Демпфирование остано- . ва скалки обеспечивается в нижнем (левом) положении, когда, например, на оси центров станка требуется точный останов по жесткому упору 18. В верхнем (правом) положении, где не требуется точность позиционирования, останов скалки происходит по инерции отключением двигателя датчиком 20, Это исключает заклинивание привода, а небольшая величина перебега обеспечивается электроторможением привода, т.е. схемой его управления. Манипулятор работает следующим образом. В первый момент после включения электродвигателя 9, так как сопротивление в паре винт 7 - гайка 17 больше, чем по поверхности контакта деталей 9 и 10, происходит поворот корпуса двигателя совместно с фланцем .10 и упором 12 в сторону, противоположную вращению винта (или вала двигателя), необходимого для перемещения скалки 3 вниз (справа налево), до упора в стенку пазов втулки 8 (против часовой стрелки на фиг. 2) выступов 11, При этом упор выходит из зацепления со стопором 13, ограничивакадим самопроизвольное перемещение скалки вниз при выключенном приводе. Так как вращению винта ничего не мешает, начинается поступательное движение гайки, а соответственно скалки по ро
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1114549A1 |
| Автоматическая револьверная головка металлорежущего станка | 1985 |
|
SU1329918A1 |
| Автоматическая револьверная головка металлорежущего станка | 1980 |
|
SU944803A1 |
| Манипулятор | 1985 |
|
SU1291383A1 |
| Электромагнитный шаговый привод | 1986 |
|
SU1410217A1 |
| Автоматическая револьверная головка | 1984 |
|
SU1194590A2 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Стенд для слесарно-доводочных работ | 1989 |
|
SU1660804A1 |
| Автоматический многозахватный манипулятор | 1990 |
|
SU1731626A1 |
МАНИПУЛЯТОР, содержащий корпус, в котором на направляющих элементах установлена скалка, несущая схват и связанная с электродвигателем через винтовую передачу, а также механизм для фиксации скалки, отличающийся тем, что, с целью упрощения конструкции манипулятора и снижения потребляемой мощности, электродвигатель установлен с возможностью поворота относительно корпуса, а механизм для фиксации скалки выполнен в виде упора, закрепленного на электродвигателе, и подпружиненного стопора, установленного на скалке с возможностью взаимодействия с упором.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Белянин П.Н | |||
| Промышленные роботы Японии | |||
| М., НИАТ, 1977, с.304 (прототип). | |||
