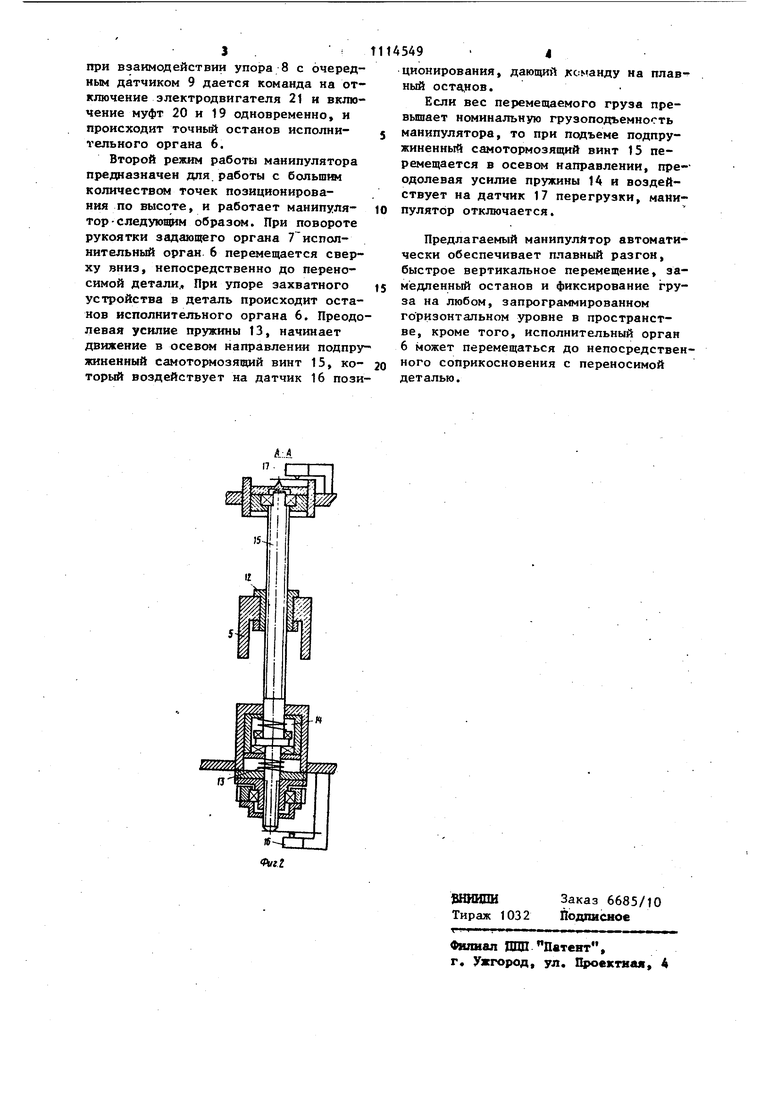
1 Изобретение относится к станкостроению и может быть использован для механизации и автоматизации операций загрузки OCHOBHOI O и вспомогательного оборудования крупногабаритными деталями. Известен манипулятор, содержащий установленную на основании колонну, на корпусе которой закреплены исполнительный и задающий органы, кинематически связанные посредством механизма поступательного перемещения с приводом t1l. Недостатком известного устройства является неточное ручное позиционирование стрелы и жесткое сочленение стрелы с корпусом, что повышает вероятность манипулятора и утом ляет оператора. Целью изобретения является повышение производительности тргща и надежности, а также безопасности работы. Цель достигается тем, что в манипуляторе , содержащем установленную на основании колонну, на корпусе которой закреплены исполнительный и задающий органы, кинематически связанные посредством механизма поступательного перемещения с приводом, механизм поступательного перемещения снабжен блоком управления и электромагнитными муфтами и выполнен в виде каретки и подпружиненного относитель но корпуса сямотормозящего винта, на котором размещена эта каретка, при.чем блок управления выполнен на каретке в виде упоров управления перемещением исполнительного органа и в виде системы датчиков останова, размещенных на корпусе с зазором относительно самотормозящего винта, при этом самотормозяций винт кинематически связан посредством электромагнитных муфт и дополнительно вве денной зубчатой пары с приводом. На фиг. 1 представлен манипулятор общий вид; на фиг. 2 - разрез А-А на фиг. 1 . Манипулятор содержрит колонну 1, установленную на основании. В верхней части колонны 1 крепится приводное устройство 2 корпусе 3, на котором расположены направляюир1е 4 под вижкой каретки 5, шарнирно связанной с исполнительным органом 6, выполHeHHbw в виде рычажно-шарнирной сис49темы и на чонце которого расположен задающий орган 7. На подвижной каретке 5 установлен блок управления, выполненный. в виде упоров 8, взаимодействующих с датчиками 9 останова быстрых и медленных ходов каретки 5, закрепленных на планках 10, устанавливаемых на нужной высоте при помощи регулировочных Ъинтов 11. Подвияшая каретка 5 через гайку 12 кинематически с помощью подпружиненного пружинами 13 и 14 самотормозящего винта 15, являющегося последним звеном кинематической цепи, имеющего возможность осевого перемещения и воздействующего на датчики 16 и 17 позиционирования зубчатьк пар 18, электромагнитных муфт быстрых 19 и медленных 20 ходов связана с электродвигателем 21 вертикальных перемещений. Манипулятор работает следующим образом. Перемещение груза в горизонтальной плоскости осуществляется вручную за счет поворота манипулятора вокруг оси колонны 1 и изменения угла наклона плеч рычажно-шарнирной системы исполнительного органа 6. Подъем и опускание исполнительного органа 6 осуществляется по команде от задающего органа 7 с помощью приводного устройства 2, при этом возможны два режима работы. Первый режим работы предназначен для работы по двум точкам позиционирования. При повороте рукоятки задающего органа 7 включаются электродвигатель 21 вертикальных перемещений и муфта 20. Вращение от электродвигателя 21 передается через зубчатые пары 18, электромагнитную муфту 20 на подпружиненный самотормозящий винт 15, действующий на каретку 5 через гайку-12, перемещающуюся по направляющим 4. При взаимодействии упора 8 с соответствувдщим датчиком 9 включается муфта 19, а муфт 20 отключается, исполнительный орган 6 перемещается с большей скоростью. Б конце хода воздействует упор 8 управления на соответствующий датчик 9, происходит выключение муфты 19 и включение муфты 20. Исполнительный орган 6 перемещается с медленной скоростью, далее 3i при взаимодействии упора 8 с очередным датчиком 9 дается команда на отключение электродвигателя 21 и включение муфт 20 и 19 одновременно, и происходит точный останов исполнительного органа 6. Второй режим работы манипулятора предназначен для. работы с большгш количествен точек позиционирования по высоте, и работает манипуляторследующим образом. При повороте рукоятки задающего органа 7исполнительный орган 6 перемещается сверху вниз, непосредственно до переносимой детали. При упоре захватного устройства в деталь происходит останов исполнительного органа 6, Преодо левая усилие пружины 13, начинает движение в осевом направлении подпру жиненный самотормозящий винт 15, который воздействует на датчик 16 пози 549 ционирования, дающий команду на плавный остатков. Если вес перемещаемого груза превышает номинальную грузоподъемность манипулятора, то при подъеме подпружиненный самотормозящий винт 15 перемещается в осевом направлении, пре одолевая усилие пружины 14 и воздействует на датчик 17 перегрузки, манипулятор отключается. Предлагаемый манипулятор автоматически обеспечивает плавный разгон, быстрое вертикальное перемещение, замедленный останов и фиксирование груза на любом, запрограммированном горизонтальном зфовне в пространстве, кроме того, исполнительный орган 6 может перемещаться до непосредственного соприкосновения с переносимой деталью.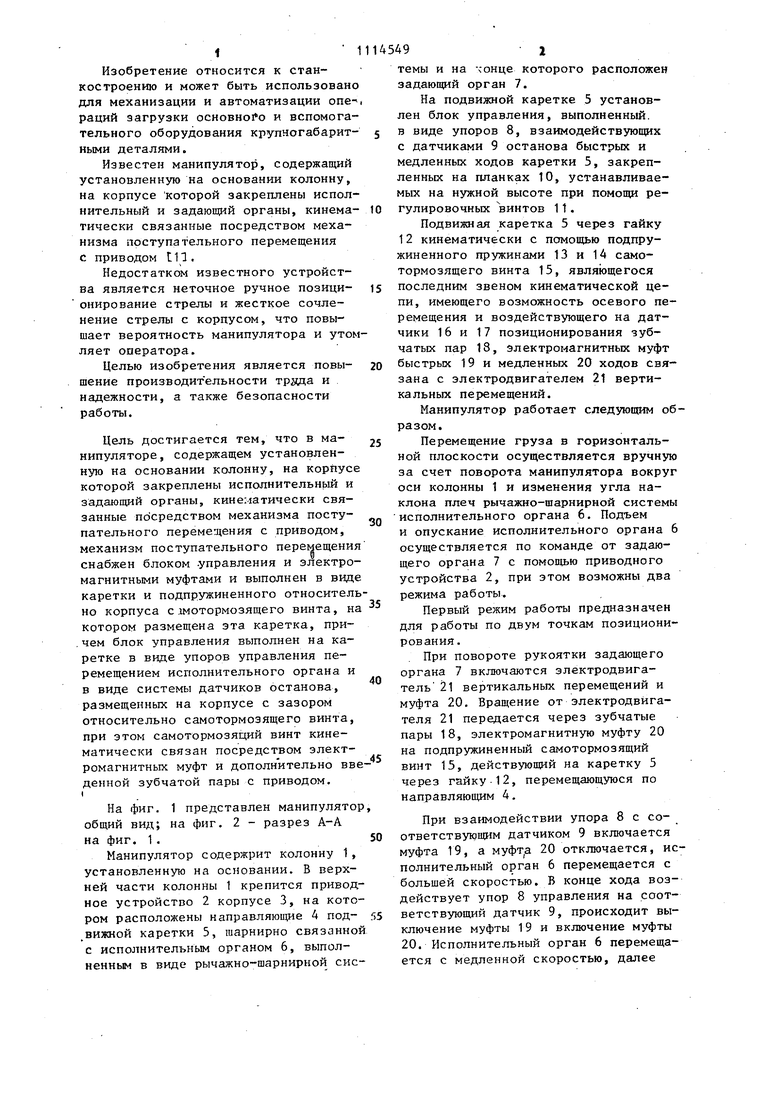
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1983 |
|
SU1093536A1 |
| Электропневматический позиционный следящий привод | 1976 |
|
SU596739A1 |
| Установка для сборки резинотехнических изделий | 1980 |
|
SU971666A1 |
| Установка для сборки резинотехнических изделий | 1984 |
|
SU1148797A2 |
| МЕХАНИЗМ ПРИВОДА УПРАВЛЯЮЩЕГО УСТРОЙСТВА | 2024 |
|
RU2826171C1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Подвесной транспортный робот | 1986 |
|
SU1333571A1 |
| Устройство для открывания и закрывания створок | 1980 |
|
SU943383A1 |
| Модуль промышленного робота | 1979 |
|
SU831606A1 |
| Модуль промышленного робота | 1975 |
|
SU525541A1 |
.МАНИПУЛЯТОР, содержащий установленную на основании колонну, на корпусе которой закреплены исполнительный и задающий органы, кинематически связанные посредством механизма поступательного перемещения с приводом, отличающийся тем, что, с целью повышения производительности труда и ЗС С6КШ|| 1 тгхййчвскАя Ш надежности, a также безопасности работы, механизм поступательного перемещения снабжен блоком управления и электромагнитными муфтами и выполнен в виде каретки и подпружиненного относительно корпуса самотормозящего винта, на котором размещена эта каретка, причем блок управления выполнен на каретке в виде упоров управления перемещением исполнительного органа и п виде системы датчиков останова, размещенных на корпусе с зазором относительно самотормозящего винта, при этом самотормозящий винт кинематт1чески свяi зан посредством электромагнитных муфт и дополнительно введенной зуб(Л чатой пары с приводом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Манипулятор | 1978 |
|
SU679385A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
