Изобретение опюсится к машиностроению и может быть использовано при разработке узлов автоматических линий и роботов-манипуляторов.
Цель изобретения - расширение техмологических возможностей, увеличение бы- передаче и каретка 4 получает поступатель- стродействия и точности позиционирования. вое перемещение. После срабатывания путевого датчика или при поступлении другой технологической команды производится
шипниках. При поступлении управляющего сигнала на пневмораспределитель включается цилиндр 14, который стопорит червячные колеса 12. При этом пара червячных колес работает как гайка в винтовой
расстопорение червячных колес и одновреПоставленная цель достигается тем, что в манипуляторе, содержащем корпус, в котором на направляющих элементах установлена каретка, несущая схват и связанная ю менно срабатывает механизм фиксации ка- с электродвигателем через винтовую пере- ретки (не показан). При этом электродви- дачу, и механизм фиксации каретки. Ка- гатель или выключается, или меняет на- ретка снабжена установленными на подтип- правление вращения в зависимости от про- никах червячными колесами, находящими- граммы работы манипулятора. ся постоянно в зацеплении с винтом, иПри таком выполнении в манипуляторе
механизмом стопорения червячных колес. 5 может быть установлен механизм ускорен- Такое выполнение манипулятора позволит ного перемещения каретки 4, выполненный в виде цилиндра (не показан), перемещающего своим штоком каретку 4 при рас- фиксированных червячных колес 12, или через шестерню 16 может быть кинематически
20
расширить технологические возможности его за счет возможности остановки каретки в любой точке рабочего хода каретки без выключения привода, что, в свою очередь, увеличит точность позиционирования, а также быстродействие манипулятора.
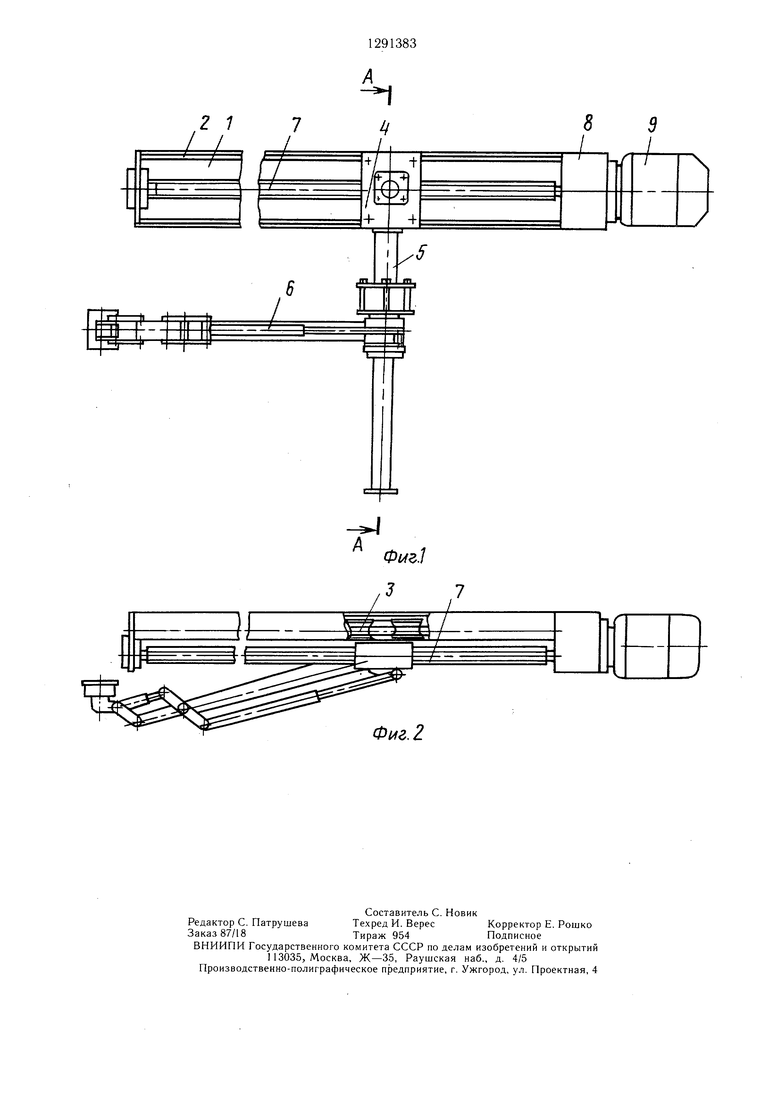
На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - то же, вид сверху; на фиг. 3 - разрез А-А на фиг. 1.
Манипулятор содержит корпус 1, в кото- 25 или иную сторону ускоренно. ром на направляющих элементах 2 установлена посредством роликов 3 каретка 4, несущая щтангу 5, на которой закреплена рука 6 (рабочий орган), несущая схват. В корпусе 1 в подщипниках установлен
присоединен другой привод ускоренного перемещения каретки. При этом вращение от привода передается червячному колесу 12, Которое взаимодействует с винтом 7, как с рейкой, перемещая каретку 4 в ту
Формула изобретения
1. Манипулятор, содержащий корпус, в
винт 7 с червячным профилем витков, 30 котором на направляющих установлена ка- приводимый в действие посредством редуктора 8 электродвигателем 9. В каретке 4 посредством подшипников 10 на осях 11 закреплены червячные колеса 12, находящиеся постоянно в зацеплении с винтом 7.
ретка, несущая рабочий орган, связанный с двигателем посредством винтовой передачи, гайка которой расположена в каретке, и механизм фиксации каретки, отличающийся тем, что, с целью расширения технологиНа крыщке 13 каретки 4 установлен при- ческих возможностей, увеличения быстродей- вод - силовой цилиндр 14 механизма 15ствия и точности позиционирования, гайка стопорения, взаимодействующего с торцамивинтовой передачи выполнена в виде чер- червячных колес 12. На одном из червяч-вячных колес, установленных в каретке в ных колес закреплена шестерня 16, котораяопорах качения, а механизм фиксации ка- может быть кинематически связана с при- Q ретки выполнен в виде приводных тормоз- водом ускоренного перемещения каретки.ных элементов, взаимодействующих с червячМанипулятор работает следующим образом.
При включении электродвигателя 9 винт 7 вращается, а червячные колеса 12 не зафиксированы и свободно вращаются на подными колесами.
2. Манипулятор по п. 1, отличающийся тем, что одно из червячных колес кинематически связано с индивидуальным приводом ускоренного перемещения каретки.
передаче и каретка 4 получает поступатель- вое перемещение. После срабатывания путевого датчика или при поступлении другой технологической команды производится
шипниках. При поступлении управляющего сигнала на пневмораспределитель включается цилиндр 14, который стопорит червячные колеса 12. При этом пара червячных колес работает как гайка в винтовой
расстопорение червячных колес и одновре менно срабатывает механизм фиксации ка- ретки (не показан). При этом электродви- гатель или выключается, или меняет на- правление вращения в зависимости от про- граммы работы манипулятора. При таком выполнении в манипуляторе
присоединен другой привод ускоренного перемещения каретки. При этом вращение от привода передается червячному колесу 12, Которое взаимодействует с винтом 7, как с рейкой, перемещая каретку 4 в ту
торону ускоренно.
Формула изобретения
котором на направляющих установлена ка-
ретка, несущая рабочий орган, связанный с двигателем посредством винтовой передачи, гайка которой расположена в каретке, и механизм фиксации каретки, отличающийся тем, что, с целью расширения технологических возможностей, увеличения быстродей- ствия и точности позиционирования, гайка винтовой передачи выполнена в виде чер- вячных колес, установленных в каретке в опорах качения, а механизм фиксации ка- ретки выполнен в виде приводных тормоз- ных элементов, взаимодействующих с червячными колесами.
2. Манипулятор по п. 1, отличающийся тем, что одно из червячных колес кинематически связано с индивидуальным приводом ускоренного перемещения каретки.
2 7
/ /
{
/
-ь/
+
ч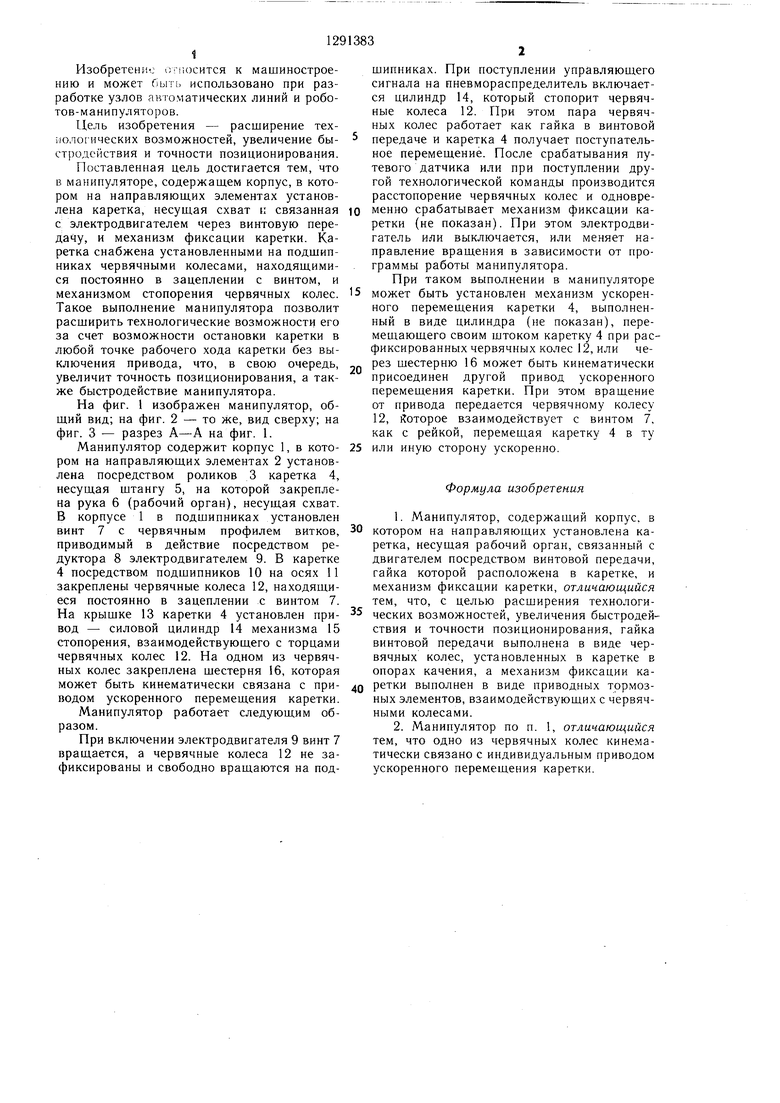
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для схвата к протезамВЕРХНиХ КОНЕчНОСТЕй | 1979 |
|
SU845824A1 |
| МАНИПУЛЯТОР АВТОСЦЕПКИ | 2010 |
|
RU2434734C1 |
| Манипулятор | 1983 |
|
SU1093536A1 |
| Манипулятор | 1986 |
|
SU1357220A1 |
| Машина для точечной контактной сварки | 1972 |
|
SU442903A1 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| Устройство для ориентации заготовки к листогибочной машине | 1991 |
|
SU1780904A1 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Горизонтально-хонинговальный станок | 1988 |
|
SU1611708A1 |
Изобретение относится к машиностроению и может быть использовано при разработке узлов автоматических линий и роботов манипуляторов. Цель изобретения - расширение технологических возможностей, увеличение быстродействия и точности позиционирования манипулятора. Манипулятор содержит корпус 1, в котором на направляюш,их элементах 2 установлена посредством роликов 3 каретка 4, несущая схват. В корпусе 1 и подшипниках установлен винт 7, приводимый в действие электродвигателем. В каретке 4 закреплены червячные колеса 12, постоянно находящиеся в зацеплении с винтом 7. На крышке 13 каретки 4 установлен привод 14 механизма стопорения 15. При включении электродвигателя и стопорении червячных колес 12 вращающийся винт и колеса образуют винтовую пару, в результате каретка 4 получает рабочее перемещение. Затем колеса 12 расфиксируют и от индивидуального привода ускоренно перемещают каретку. При этом червячные колеса 12 взаимодействуют с винтом 7, как с рейкой. 1 з.п. ф-лы, 3 ил. « С/ с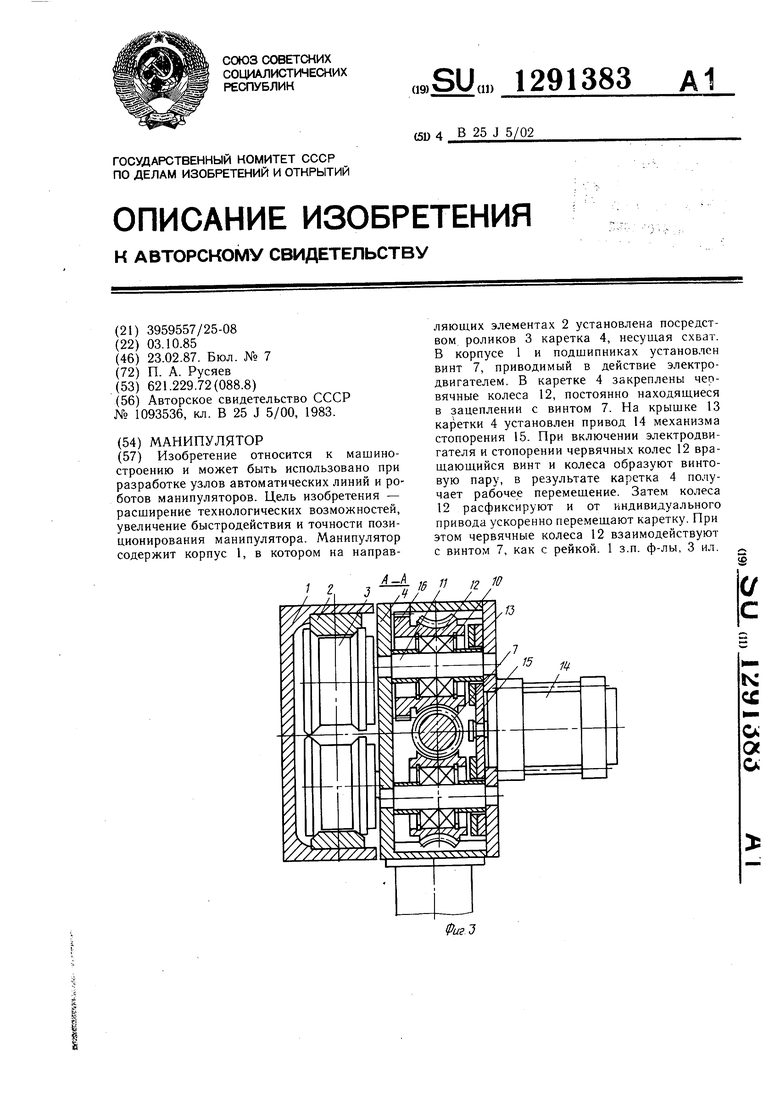
/
./
Фиг. 2
| Манипулятор | 1983 |
|
SU1093536A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
