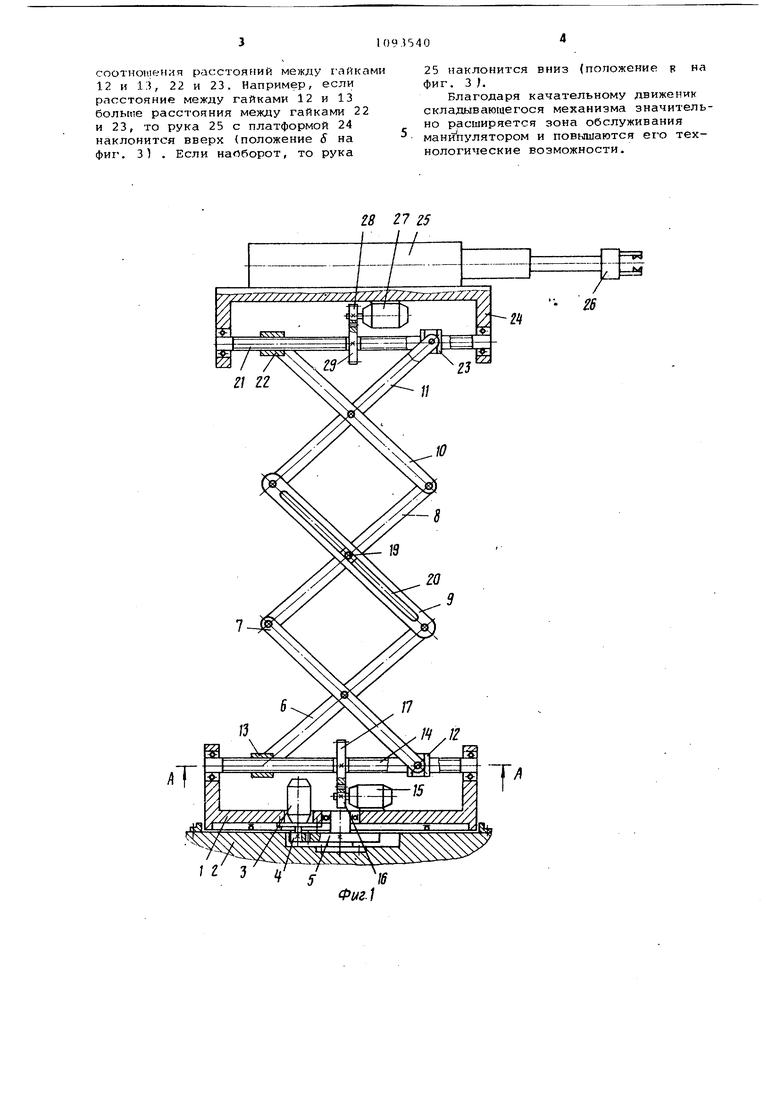
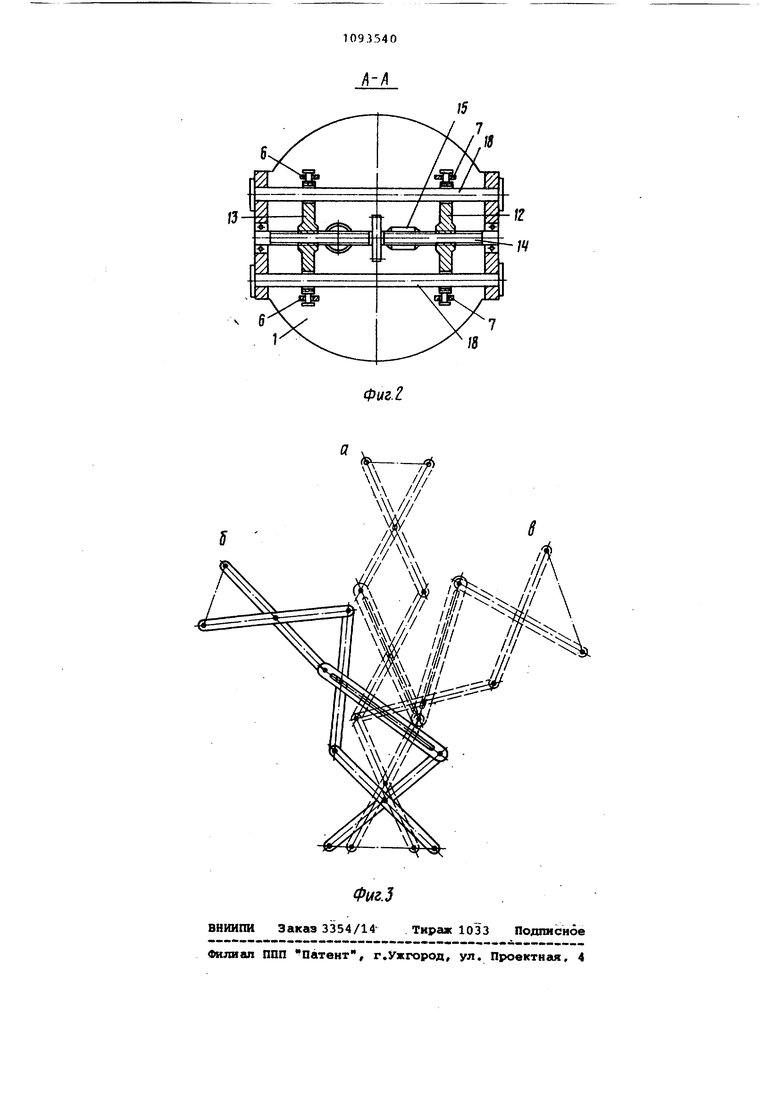
X) :о :п i Изобретение относится к машиностроению и может быть использовано при создании и разработке средств автоматизации техноло1ических процессов . Известен манипулятор для перемещения различных предметов, состоящий из неподвижного основания, складывающегося механизма, выполня ющего роль стойки и механической руки с захватом, в котором вертикальное перемещение осуи.1ествляется путем передвижения одного из шарниров в горизонтальном направлении по неподвижному основанию с помощью силового цилиндра ClD. Наиболее близким к предлагаемому техническим решением является манипулятор, содержащий поворотное осно вание, на котором установлен склады вающийся механизм типа пантографа, содержащий ряд пар шарнирно соедине ных между собой звеньев, платформу несущую механическую руку с захватом и закрепленную н-а верхних звень ях складывающегося механизма и привод подъема в виде винтовой переда чи с 1айкой, которой соединены нижние звенья складывающегося меха низма С2 3 . Однако в известных устройствах складывающийсямеханизм обеспечивает только вертикальное переметение руки, что ограничивает технологические возможности манипулятора. Цель изобретения - расщирение технологических возможностей путем увеличения зоны обслуживания и сообщения руке дополнительного качательного движения. Поставленная цель достигается тем, что манипулятор, содержащий поворотное основание, на котором установлен складывающийся механизм типа пантографа, содержащего ряд пар шарнирно соединенных между собо звеньев, платформу, несущую механическую руку с захватом и закрепленную на верхних звеньях складывающе гося механизма и основной привод подъема в виде винтовой передачи, с гайками которой соединены нижние звенья складывающегося механизма, снабжен дополнительным приводом подъема, идентичным основному, при чем гайки этого привода подъема соединены с верхними звеньями скла дывающегося механизма и винт каждо го привода подъема имеет на своих концах резьбы противоположного направления, при этом звенья-одной из пар складывающегося механизма связаны между собой шарнирно с воз можностью продольного перемещения. Выполнение одной из пар звеньев складывающегося механизма с переме О1ающимся шарниром вдоль тела одног звена позволяет при различном сбли жении гаек обоих винтовых механизм получать дополнительно платформы вместе с рукой в ту или иную сторону, что, в свою очередь, расширяет зону обслуживаемого пространства манипулятора и его технологические возможности. На фиг. 1 изображен манипулятор; на фиг. 2 - разрез А-А на фиг.1; на фиг. 3 - различные положения складывающегося механизма. Манипулятор имеет поворотное основание 1, установленное на неподвижном основании 2 и снабженное приводом вращения., содержащим электродвигатель 3, шестерню 4 и неподвижную шестерню 5, два идентичных складывающихся механизма типа пантографа, содержащих шарнирно соединенные между собой звенья 6-11, установленных параллельно друг другу на гайках 12 и 13, взаимодействующих с винтом 14, имеющим на своих концах резьбы противоположного направления. Винт 14 установлен в поворотном основании 1 и связан с электродвигателем 15 через шестерни 16 и 17, а гайки 12 и 13 зафиксированы от проворота с помощью направляющих валов 18. Звенья 8 и 9 связаны между собой с помощью скользящего шарнира 19 вдоль паза 20 звена 9. На звеньях 10 и 11 с помощью идентичного винтового механизма, содержащего винт 21, гайки 22 и 23 с направляющими валами (не показаныJ установлена платформа 24, несущая механическую руку 25 с захватом 26. Винт 21 снабжен отдельным приводом вращения, содержащим электродвигатель 27 и шестерни 28 и 29. Манипулятор работает следующим образом. Вращение Манипулятора вокруг вертикальной оси осуществляется от электродвигателя 3 через шестерню 4 и неподвижную шестерню 5. Перемещение платформы 24 вместе с рукой 25 в вертикальном направлении осуществляется при одновременном включении электродвигателей 27 и 15,которые приводят во вращение винты 21 и 14 соответственно .При этом гайки 12 и 13, а также 22 и 23 одновременно сближаются или расходятся, что соответствует подъему или опусканию платформы 24 (положение а на фиг. 3) .В этом случае расстояние между гайками 12 и 13 должно быть равно -расстоянию между гайками 22 и 23. При этом центр платформы 24 перемещается строго в вертикальном направлении. При различном выдвижении гаек перемещающийся шарнир 19, закрепленный на звене 8, перемещается вдоль паза 20 звена 9 и платформа 24 наклонится в ту или иную сторону от горизонтальjioro положения в зависимости от
cooTHOuienna расстояний между гайками 12 и 13, 22 и 23. Например, если расстояние между гайками 12 и 13 больше расстояния между гайками 22 и 23, то рука 25 с платформой 24 наклонится вверх (положение S на фиг. 3) . Если наоборот, то рука
25 наклонится вниз (потюжение р на фиг. 3 К
Благодаря качательному движеиик складывающегося механизма значительно расширяется зона обслуживания манй пулятором и повышаются его технологические возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2705824C1 |
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2691169C1 |
| Манипулятор модульного типа | 1983 |
|
SU1263521A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Манипулятор | 1985 |
|
SU1321580A1 |
| Манипулятор | 1971 |
|
SU372885A1 |
| Манипулятор | 1973 |
|
SU460682A1 |
| Схват манипулятора | 1981 |
|
SU963850A1 |
| Ковочный манипулятор | 1980 |
|
SU893385A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
1ИЛНИПУЛЯТОР, содержащий поворотное основание, на котором установлен складывающийся механизм типа пантографа, содержащий ряд пар шарнирно соединенных между собой звеньев, платформу несущую механическую руку с захватом и закрепленную на верхних звеньях складывающегося механизма и основной привод подъема в виде винтовой передачи, с гайками которой соединены нижние звенья складывающегося механизма, отличающийся тем, что, с целью расширения технологических возможностей, он снабжен дополнительным приводом подъема, идентичным основному, причем гайки этого привода подъема соединены с верхними звеньями складывающегося механизма и винт каждого П15ивода подъема имеет на своих концах резьбы противоположного направления, при этом звенья одной из пар складывающегося механизма свя-j (Л заны между собой шарнирно с возможностью продольного перемещения.
г гг
; f 3 ц
28 27 25
//
18
/в
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| СОЕДИНИТЕЛЬ ЭЛЕКТРИЧЕСКИХ ПРОВОДОВ | 2003 |
|
RU2253929C1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Манипулятор | 1971 |
|
SU372885A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
