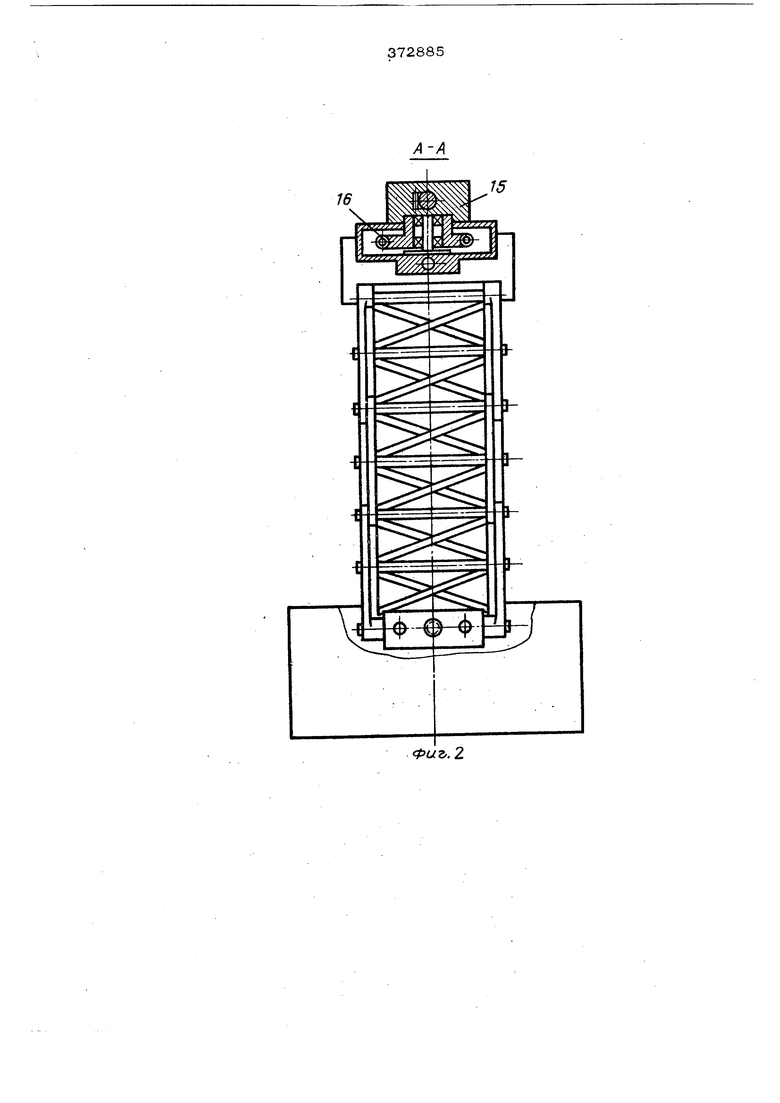
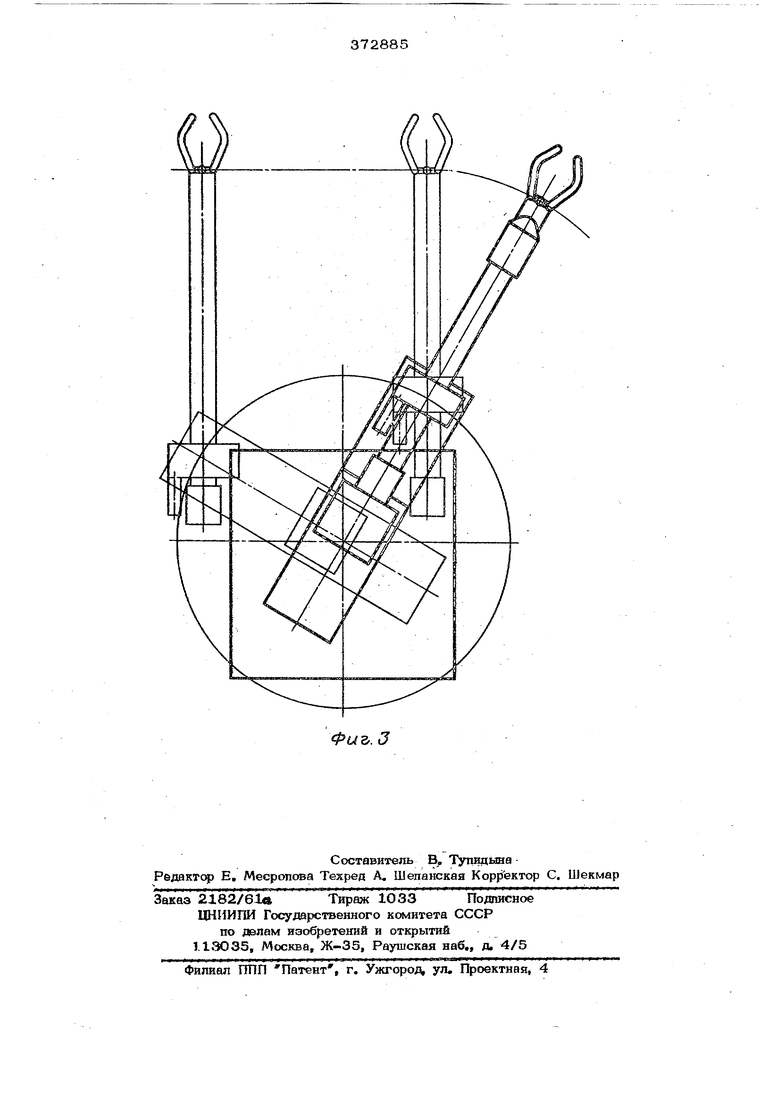
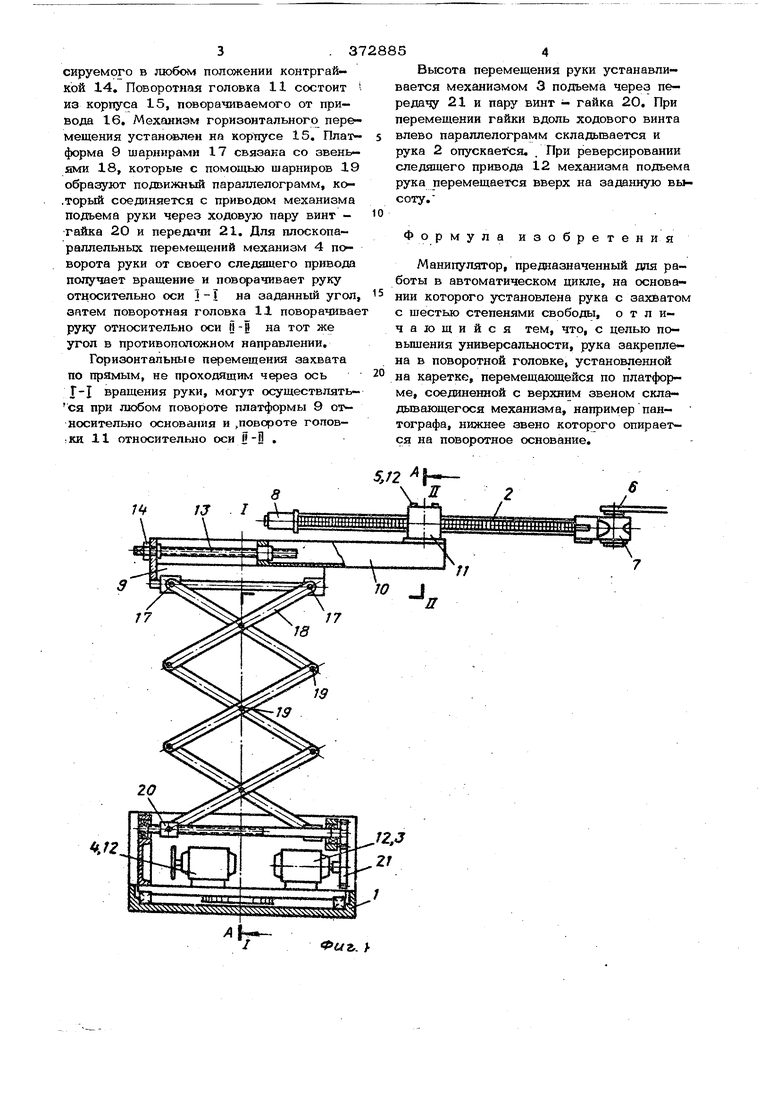
Изобретение отнооится к манипупятб рам для промышленного применения, например, в автоматических станичных линиях. Известны манипуляторы, работающие в автоматическом цикле, на основании ко торых установлена подъемная к поворот ная колонна, несущая руку с захватом с шестью степенями свободы. Предлагаемый манипулятор отличается от известных тем, что, с целью повьшения универсальности, рука закреплена в поворотной головке, установленной на каретке, перемещающейся по платформе, соединенной с верхним звеном складьюающегося механизма, например панто графа, нижнее звено которого опирается на поворотное основание. Этим обеспечивается перемещение руки по горизонтальным прямым, не проходящим через ось поворота основания, например, при загрузке многоместнкк пр способлений многоручьевых штампов. На фиг. 1 показан описьтаемый манипулятор, общий вид, на фиг. 2 - разрез А-А фиг. 1, на фиг, 3 - рабочая зона манипулятора. Манипулятор состоит из основания 1 к подвижной относительно основания руки 2. В основании расположен механизм 3 подъема руки и механизм 4 поворота руки относительно основания. Рука механизм 5 горизонтального перемещения и захват 6, который приводатся в действие механизмом 7 смыкания и размыкания. Захват 6 ориентируется относительно руки механизмом 8. Рука снайкена смонтированной на механизме подъема платформой 9 и перемещвемой относительно него в гориэонтапьгном нанравпении подвижной кареткой J О, на которой установлена поворотная головка 11. Все механизмы работают от следящих приводов 12. Рабочая зона манипулятора обслуживается перемещением подвижной каретки 10, на1фнмер, от ходового винта 13, фкксируемрго в любом положении контргайкой 14. Поворотная головка 11 состоит из корпуса 15, поворачиваемого от привода 16, Механизм горизонтального перемещения устансжлен на корпусе 15. Платформа 9 шарнирами 17 связана со звеньями 18, которые с помощью шарниров 19 образуют подвижный параллелограмм, ко.торый соединяется с приводом механизма подъема руки через ходовую пару винт гайка 20 и передачи 21. Для плоскопараллельных перемещений механизм 4 поворота руки от своего следящего привода получает вращение и поворачивает руку относительно оси j - Т на заданный угол, зятем поворотная головка 11 поворачивае руку относительно оси tl-S на тот же угол в противоположном направлении. Горизонтальные перемещения захвата по прямым, не проходящим через ось Г-1 вращения руки, могут осуществляться при любом повороте платформы 9 относительно основания и повороте голов:ки 11 относительно оси И-П . Фиъ. Высота перемещения руки устанавливается механизмом 3 подъема через передачу 21 и пару винт - гайка 20. При перемещении гайки вдоль ходового винта влево параллелограмм складьюается и рука 2 опускается. . При реверсировании следящего привода 12 механизма подъема рука перемещается вверх на заданную вььсоту. Формула изобретения Манипулятор, предназначенный для работы в автоматическом цикле, на основании которого установлена рука с захватом с щестью степенями свободь, отличающийся тем, что, с целью повыщения универсальности, рука закреплена в поворотной головке, установленной на каретке, перемещающейся по платформе, соединенной с верхним звеном складьтающегося механизма, например пантографа, нижнее звено которого опирается на поворотное основание. )
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1980 |
|
SU944919A1 |
| Автомат для сборки пакетов магнитопроводов электрических машин | 1988 |
|
SU1534645A1 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| Манипулятор | 1982 |
|
SU1085805A1 |
| Автоматическая линия для сборки ребристых нагревателей | 1989 |
|
SU1710171A1 |
| Сварочная установка | 1975 |
|
SU556919A1 |
| Подъемный механизм крепеустановщика | 1986 |
|
SU1320431A1 |
| Устройство для очистки корпусов судов | 1972 |
|
SU516574A1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |
| Устройство для накопления и перемещения изделий | 1985 |
|
SU1242331A1 |