00 ел
Изобретение относится к машиностроению, а именно к средствам автоматизации технологических процессов.
Известен манипулятор, содержащий исполнительный орган и модули стойки и механической руки, выполненные в виде телескопических звеньев с приводом винтового перемещения, установленньГх на основаниях.
Недостатком известного манипулятора являются ограниченные технологические возможности и малая грузоподъемность.
Цель изобретения - расширение технологических возможностей и повышение грузоподъемности.
Поставленная цель достигается тем, что в манипуляторе модульного типа, содержащем исполнительный орган и модули стойки и механической руки, выполненные в виде телескопических звеньев с приводом винтового перемещения, установленных на основаниях, модули как руки, так и стойки вьтолнены из двух параллельных рядов телескопических звеньев, расположенных в одной плоскости, причем первое звено первого ряда телескопических звеньев каждого модуля жестко связано со своим основанием, первое звено второго ряда телескопических звеньев каждого модуля шарнирно связано с тем же основанием, последние звенья обоих рядов телескопических звеньев модуля стойки шарнирно связаны с основанием модуля руки, а последние звенья обоих рядов телескопических звеньев модуля руки шарнирно связаны с исполнительным органом, при этом оси шарнирных соединений звеньев перпендикулярны плоскости расположения телескопических звеньев.
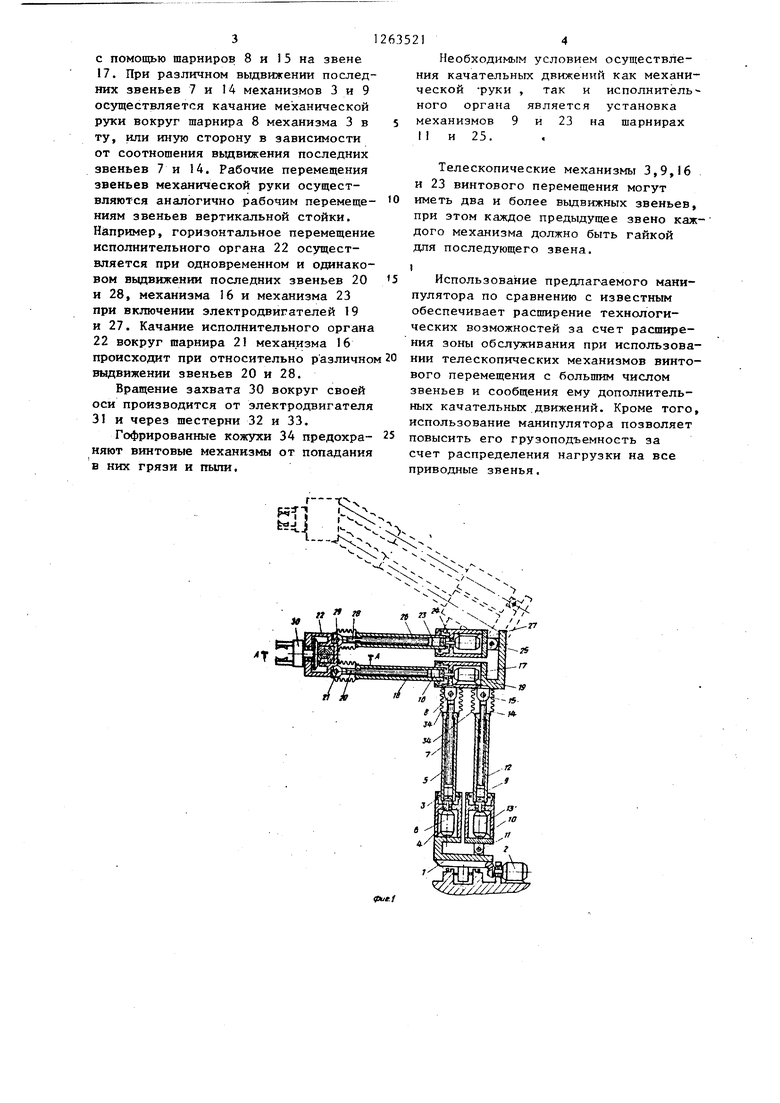
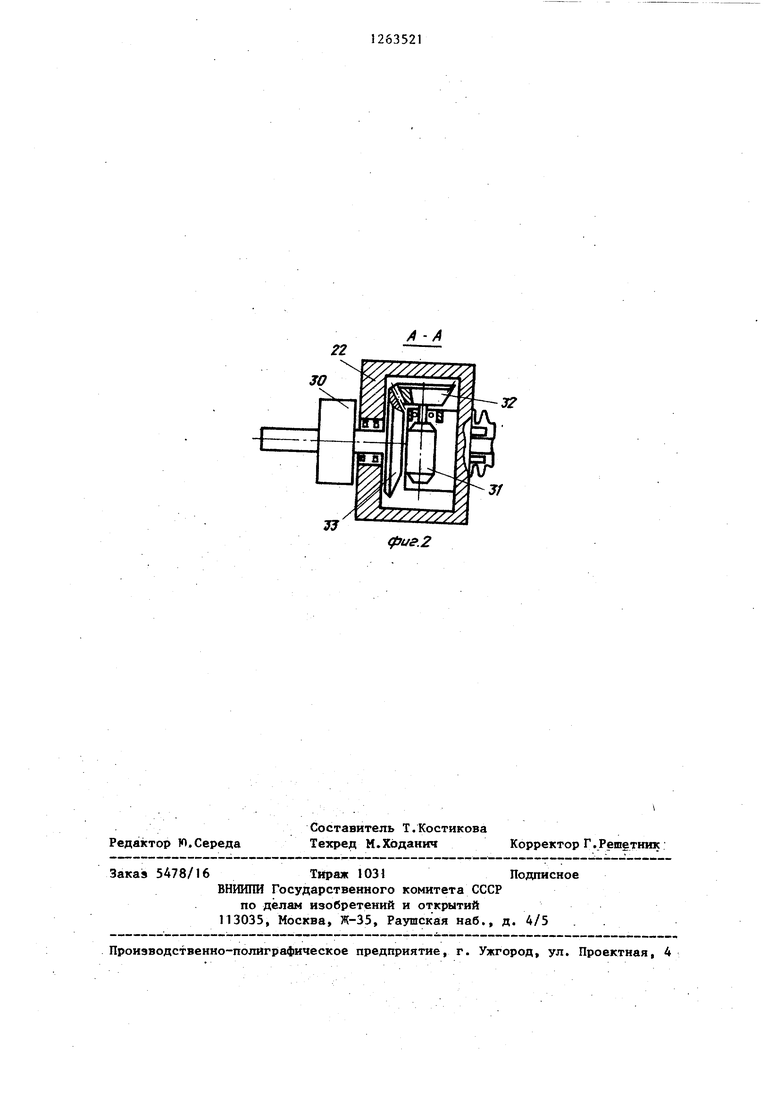
На фиг.1 схематически изображен манипулятор модульного типа, осевой разрез; на фиг,2 - разрез А-А на фиг,1.
Манипулятор модульного типа содержит аналогичные модули стойки и руки.
Модуль стойки выполнен в виде поворотного основания 1, связанного с электродвигателем 2 привода поворота, двух параллельных рядов телескопических звеньев. Первый ряд состоит из телескопического механизма 3 винтового перемещения, содержащего первое звено А, жестко связанное с основанием 1, звено 5, связанное с электродвигателем 6 привода винтового перемещения, установленного в первом звене 4, и последнее звено 7 с-гаарниром 8. Второй ряд состоит из телескопического механизма 9 винтового перемещения, содержащего первое звено 10, связанное с основанием 1 с помощью шарнира 11, звено 12, связанное с основанием электродвигателя 13 привода качания, установленного в первом звене 10, и последнее звено 14 с шарниром 15.
Модуль руки выполнен аналогично модулю стойки и содержит два параллельных ряда телескопических звеньев.Первый ряд состоит из телескопического механизма 16 винтового перемещения, содержащего первое звено 17, закрепленное на шарнирах 8 и 15, звено 18, связанное с электродвигателем
19 привода горизонтального перемещения, установленного в звене 17, и последнее звено 20, связанное с помощью шарнира 2I с исполнительным органом 22, Второй ряд состоит из те лескопического механизма 23 винтового перемещения , содержащего первое звено 24, связанное через шарнир 25 с первым звеном 17 механизма 16, звено 26, связанное с электродвигателем
27 привода качания исполнительного органа 22, установленного в звене 24, последнее звено 28 которого связано через шарнир 29 с исполнительным органом 22. Исполнительный орган 22
включает захват 30, электродвигатель 31 привода вращения захвата через шестерни 32 и 33. Вьщвижные звенья всех телескопических механизмов винтового перемещения защищены гофрированными кожухами 34.
Манипулятор работает следующим образом.
Вращение манипулятора вокруг вертикальной оси осуществляется от электродвигателя 2, который приводит во вращение основание 1. Вертикальное перемещение механической руки осуществляется при одинаковом вьщвижении последних звеньев 7 и 14 механизмов 3 и 9, .которое осуществляется при одновременном включении электродвигателей 6 и 13, вращение от которых передается на звенья 5 и 12, выполняющих функцию гайки и, следовательно, последние звенья 7 и 14, выполняющие функцию винтов, осуществляют вертикальное перемещение, так как они зафиксированы от разворота с помощью шарниров 8 и 15 на звене 17. При различном вьщвижении последних звеньев 7 и 14 механизмов 3 и 9 осуществляется качание механической руки вокруг шарнира 8 механизма 3 в ту, или иную сторону в зависимости от соотношения вьздвижения последних звеньев 7 и 14. Рабочие перемещения звеньев механической руки осуществляются аналогично рабочим перемещениям звеньев вертикальной стойки. Например, горизонтальное перемещение исполнительного органа 22 осуществляется при одновременном и одинаковом выдвижении последних звеньев 20 и 28, механизма 16 и механизма 23 при включении электродвигателей 19 и 27. Качание исполнительного органа 22 вокруг шарнира 21 механ.изма 16 происходит при относительно различно выдвижении звеньев 20 и 28. Вращение захвата 30 вокруг своей оси производится от электродвигателя 31 и через щестерни 32 и 33. Гофрированные кожухи 34 предохраняют винтовые механизмы от попадания в них грязи и пыли. Необходимым условием осуществления качательных движений как механической -руки , так и исполнитель ного органа является установка механизмов 9 и 23 на шарнирах II и 25. Телескопические механизмы 3,9,16 и 23 винтового перемещения могут иметь два и более выдвижных звеньев, при этом каждое предыдущее звено каждого механизма должно быть гайкой для последующего звена. Использование предлагаемого манипулятора по сравнению с известным обеспечивает расщирение технологических возможностей за счет расширения зоны обслуживания при использовании телескопических механизмов винтового перемещения с большим числом звеньев и сообщения ему дополнительных качательных.движений. Кроме того, использование манипулятора позволяет повысить его грузоподъемность за счет распределения нагрузки на все приводные звенья.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1981 |
|
SU973350A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| Манипулятор | 1983 |
|
SU1093540A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Манипулятор | 1982 |
|
SU1068280A1 |
| Телескопический механизм выдвижения рабочего органа манипулятора | 1980 |
|
SU1066802A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1161370A2 |
| Шарнир манипулятора | 1982 |
|
SU1057274A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU975381A1 |
МАНИПУЛЯТОР МОДУЛЬНОГО ТИПА, содержащий исполнительный орган и модули стойки и механической руки, выполненные каждый в виде телескопических звеньев с механизмом винтового перемещения и установленные на основаниях, отличающийся тем, что, с целью расширения технологических возможностей и повьппения грузоподъемности, модули как руки, так и стойки вьтолнены из двух параллельных рядов телескопических звеньев, расположенных в одной плоскости, причем первое звено первого ряда телескопических звеньев каждого модуля жестко связано со своим основанием, первое звено второго ряда телескопических звеньев каждого модуля шарнирно связано с тем же основанием, последние звенья обоих рядов телескопических звеньев модуля стойки шарнирно связаны с основанием модуля руки, а последние звенья обоих рядов телескопических звеньев модуля руки шарнирно связаны с исполнительным орга(Л ном, при этом оси шарнирных соединений звеньев перпендикулярны плоскости расположения телескопических звеньев.
| Манипулятор | 1981 |
|
SU973350A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
