(S4) КОВОЧНЫЙ МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| КОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2010661C1 |
| Ковочный манипулятор | 1983 |
|
SU1171172A1 |
| Ковочный манипулятор | 1980 |
|
SU935196A1 |
| Ковочный безрельсовый манипуля-TOP | 1978 |
|
SU795707A1 |
| Механизм вращения хобота ковочного манипулятора | 1982 |
|
SU1038052A1 |
| Клещевой захват ковочного манипулятора | 1982 |
|
SU1034826A1 |
| Подвесной ковочный манипулятор | 1978 |
|
SU706176A1 |
| Механизм изменения высоты подъема хобота ковочного манипулятора | 1981 |
|
SU979012A1 |
| Ковочный манипулятор | 1983 |
|
SU1082542A1 |
| Ковочный манипулятор | 1979 |
|
SU848138A1 |
1
Изобретение относится я. кяюмагатёЯК ному оборудованию кузнечно-прессовых цехов машиностроительных предприятий, а именно к конструкциям ковочных манипуляторов.
Известен ковочный манипулятс, содержащий основание, установленную на нем поворотную опору с рамой, хобот с клешами, смонтированный на подвеске в внде рычажного пантографа, а также приводные механизмы поворота, подъема и перемещения клешей Ц .
Недостатками известного ковочного манипулятора явл51ются невысокие продолжительность и надежность его работы, а также неудовлетворительные условия его эксплуатации.
Цель изобретения - повышение проиэ водит ельности и надежности работы ковочного манипулятора, а также улучшение условий его эксплуатации.
Для достижения указанной цели ковочный манипулятор, содержащий основание, установленную на нем поворотную опору
С рамой, хобот с клешами, смонтированный на подвеске в виде рычажного пантографа, а также приводные механизмы поворота, подъема и пе|земешения клешей, снабжен размещенной на раме с возможностью перемешения приводной кареткой с установленным на ней кронштейном, а также шшиндром-уравновешивателем, размешенным на кронштейне, при этом рычаги подвески шарнирно смонтированы на
10 крсшштейне, а рычажный пантограф снабжен дополнительным рычагом, шарнирно установленным на одном из шарниров, соединяющих рычаги подвески с кронштейном, и связанным с механизмом подъе
ts ма и посредством серьги и соединенного с ней гидроцилиндра - с одним из рычагов подвески.
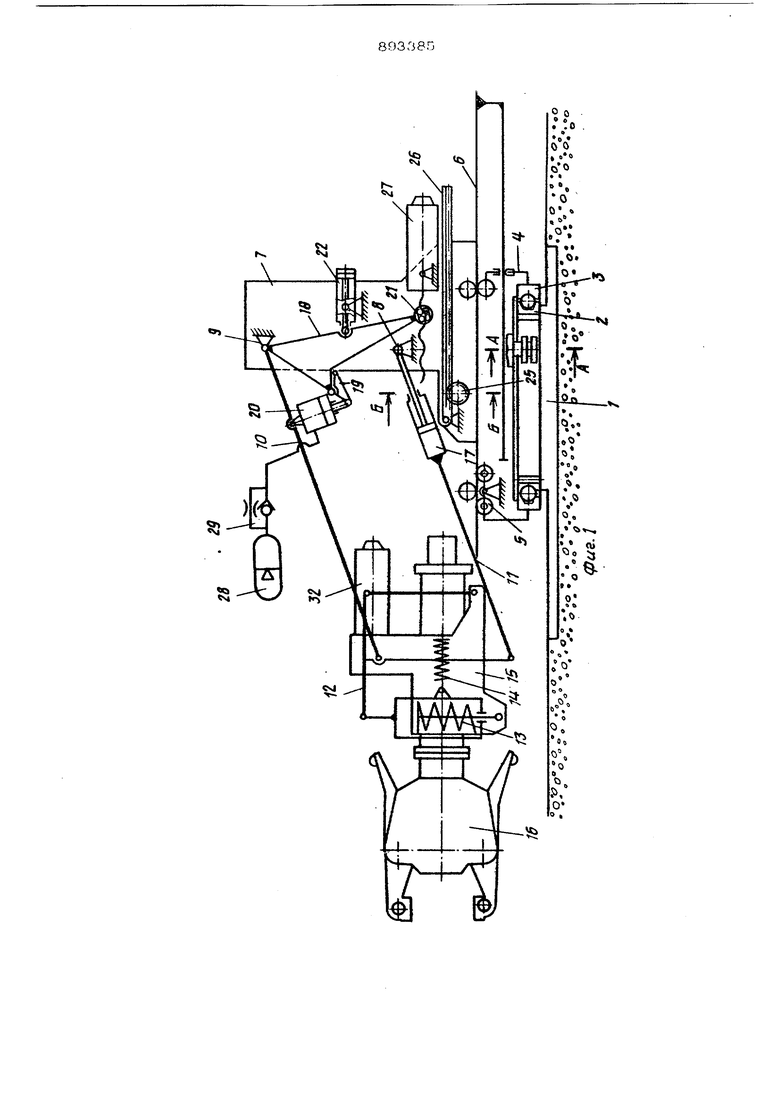
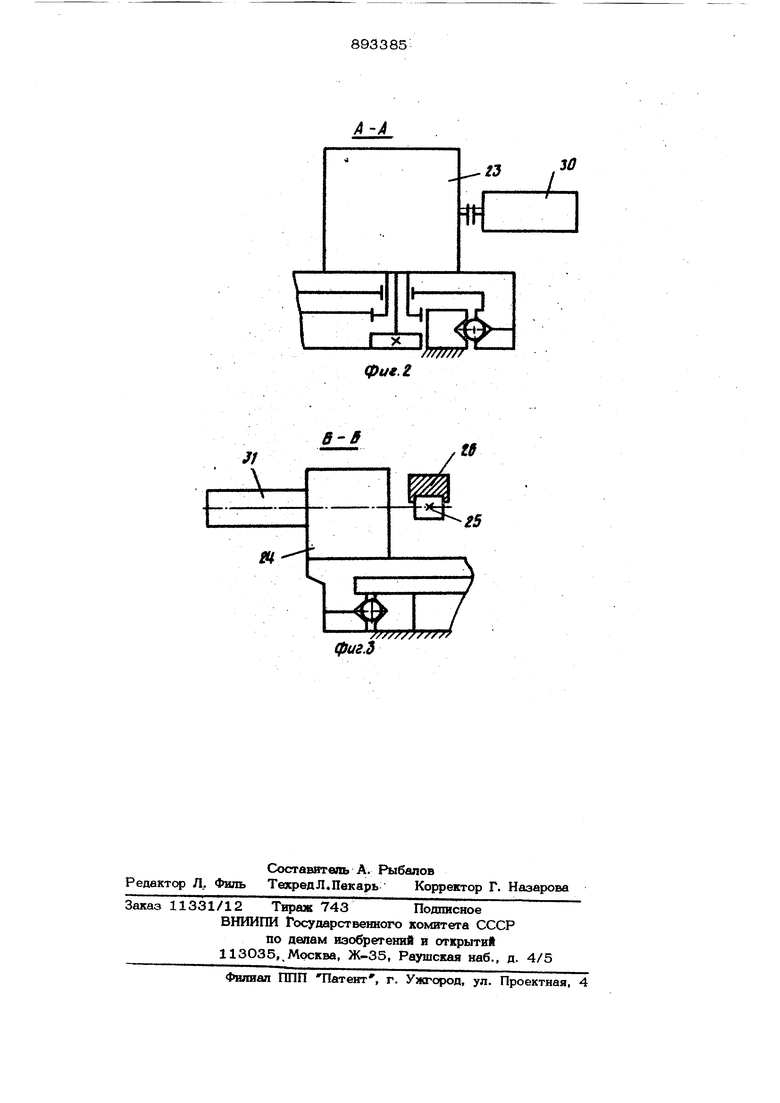
На фиг. 1 изображен ковочный манипулятор, обший вид| на фиг. 2 -разрез}
20 А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Манипулятор содержит основание 1 с закрепленной на нем неподвижной частью
2поворотной опоры. На подвижной части
3пЬворотной опоры смонтирована рама 4 в направляющих роликах 5 которой перемешается каретка 8. На кронштейне 7 каретки 6 с помощью осей 8 и 9 укреплены рычаги 10 и 11 пантографа, на замыкающем эвене 12с помошью упругих подвесок 13 и 14 прикреплен хобот 15, несущий на себе кпетяи 16. В нижний рычаг 11 пантографа подвески встроен гидроцилиндр 17. Рычаг 18 соединен с пантографом с помощью ломаюшейся серьги 19 и гидроцилинщзв 2О, к нек ж® присоединена шарико-винтовая пара 21 в цилиндр-уравновешиватель 22, облегчающий работу привода при подъеме.
На раме 4 смсмтирован безаазориый редуктор 23, выходные шестерни которо го зацепл51ются с эубчатым венцом неподвижной части повсфотной опоры основания. На той же раме 4 смонтирован и редуктор 24 осевого (радиального) пере мешения, шдходная шестерня 25 кторого соединена с рейкой 26, укрепленной шарнирно на кронштейне 7.
ШариЕо-винтовая пара 21 соединена с электродвигателем 27 подъема, а диляндр-буф 2О - с пневмогищюаккумулятором 28 через трубсяфовод и о 9втный клапан с дросселем 29. Редукторы 23 и 24 и редуктор хобота 15 соедине ны с электродвигателями ЗО-32 соответственно.
Машспулятор работает следующим образом.
Подъем (или опускание) хобота прс«сходит при включении электродвигателя 27, соединенного с шарико-винтовой парой 21, при этом рычаг 18 поворачивается и поднимает (или опускает) пгитоrpaj) 1О-11 вместе с хоботом и клешами При воздействии на клещи (через поковку) со стороны бойка пресса ось хобота 15 опускается за счет нытеснення масла из цилиндра 20 в пневмогидравлнческий аккумулятор 28. Последующий подъем хобота происходит замедленно за счет обратного клапана с дросселем 29.
При опускании поковки на боек прессов серьга 19 переламывается в шарнире соединяющем ее с рычагом 18, что предупреждает перегрузку механизмов. Поворот рамы, превышающий боковое движение клещей, происходит при включении электродвигателя 30 редуктора 23, шест эни которого обкатываются по венцу поворотного основания. Осевое (радиальное) движение клещей происходит при включении электродвигателя 31, соединенного с редуктором 24, выходная шестерня которого через рейку 26 перемеtutaeT каретку 6, а вместе с ней подвеску и клепш. Вращение клещей осуществляется от электродвигателя 32 через редуктор, вмс 1Т1фованный в хобот 15. Наклон клешей осушесгитяется за счет работы гидрошяиядра 17.
Испага эование изобретения позволяет повысить производительность и надежность рдботы ковочного манипулят }в, а также
улучшить успошм его эксплуатации.
а обретения
О р м 7 Л а
Ковочяый манипулятор, сод жащнй ос-Яование, установленную на нем поворотную опору с рамой, хобот с клешами, смонти- i роваякый на подвеске в виде рычажного шштографй, а также приводные механизмы
nosopote, подъема н перемеШения клешей, отличающийся тем, что; с П&пью повышения производительности и ваОежвости работы, а также улучшения условий эксплуатации, он снабжен размещенной на раме с возможностью перемещения тфиврдной кареткой с установленным на ней кронштейном, а также дилиндрин хурввновешивателем, размешенным на крсяяитейне, при атом рычаги подвески смонтироваю иа кронштейне, а рычажный снабжен дополнительным рычаroMi шарнирно установленным на одном из шарниров, соединяющих рычаги подвески с 1фО1оатейном, и связанным с механизмом поиъемб я посредством серьги и соединенного с ней гидроцилиндра - с одним из рычагов подвески.
Источники информации, щжнятые во Н1имание при экспертизе 1. Проспект фирмыMn(3romat7
0 Станкоимпс эт, 1977.
«
30
/J
I
Sff
Л
фигЪ
