Изобретение относится к технологическому оборудованию, применяемому для механизации и автоматизации технологических процессов, и может быть использовано в конструкциях промышленных роботов и манипуляторов.
Известен схват манипулятора, содержащий корпус, привод в виде винтовых пар и зажимные пальцы, связанные с приводом и корпусом шарнирно-рычажными механизмами l3Недостатком известного трехпалого схвата является сложность конструкции и невозможность захватывания, например, круглых деталей в широком диапазоне типоразмеров из-за ограниченности прямолинейного участка траектории перемещения зажимных пальцев.
Целью изобретения является упрощение конструкции и расширение технологических возможностей схвата.
Указанная цель достигается тем, что,винтовые пары кинематически связаны между собой и расположены в одной плоскости под углом 120° друг к другу, а шарнирно-рычажные мехаHH3NS3i по крайней мере двух -зажимных пдльцев выполнены каждый в виде пантографа и шарнирно связанного с ним параллелограммного механизма, причем исходное звено пантографа шарнирно установлено на гайке соответствующей винтовой пары.
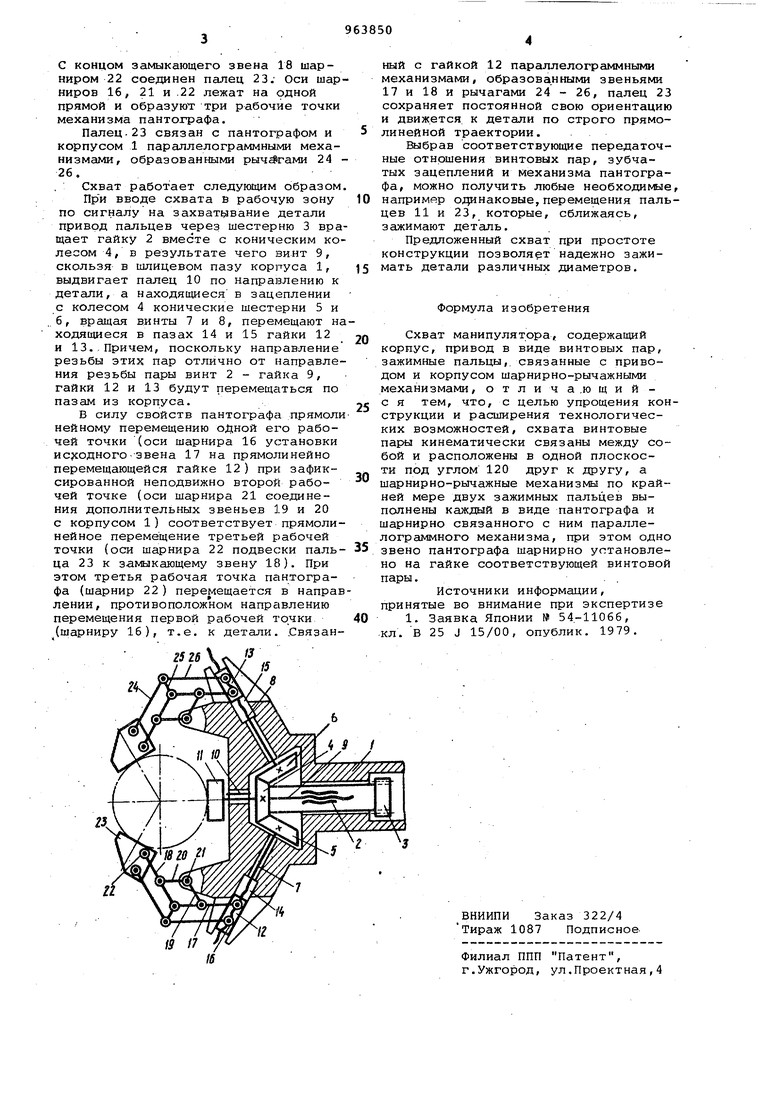
На чертеже схематично изображен предлагаемый схват манипулятора,
В корпусе 1 схвата размещены три винтовые пары, гайка 2 одной из ко10торых, имеющая левую резьбу, через жестко закрепленную на ней цилиндрическую шестерню 3 связана с приводом схвата, а через жестко закрепленное на ней коническое колесо 4, на15ходящееся в зацеплении с коническими шестернями 5 и 6,- с винтами 7 и 8 соответственно двух других пар, имеющих правую резьбу. На конце взаимодействующего с гййкой 2 винта
20 9 первой пары, расположенного в шпоночном пазу 10 корпуса 1, жестко смонтирован палец 11. На каждой из . гаек 12 и 13 расположенных в соответ ствующих пазах 14 и 15 корпуса двух других винтовых пар в шарнире 16 установлено исходное звено 17 четырехзвенного механизма пантографа, содержащего также замыкающее звено 18 и два дополнительных звена 19 и 20,
30 шарниром 21 связанных с корпусом 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват манипулятора | 1983 |
|
SU1087327A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор | 1983 |
|
SU1093540A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| ШАРНИРНОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 2019 |
|
RU2729690C1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Захват манипулятора | 1977 |
|
SU642151A1 |
| Манипулятор | 1980 |
|
SU935450A2 |
| ПРОСТРАНСТВЕННО-ПЛОСКИЙ ПЛАТФОРМЕННЫЙ СФЕРИЧЕСКИЙ МАНИПУЛЯТОР | 2021 |
|
RU2781602C1 |
| КОНЦЕВОЙ ЭФФЕКТОР С ШАРНИРНЫМ УЗЛОМ И ПРИВОД ЭНДОСКОПИЧЕСКОГО ХИРУРГИЧЕСКОГО АППАРАТА | 2016 |
|
RU2636853C2 |
