1
Р1зобретение относится к области судовой автоматики.
Известны авторулевые, содержащие датчик угла перекладки руля и элемент сравнения, выходы которых подключены соответственно к первому и второму входам усилителя мощности, датчик и задатчик курса, выходы которых соединены соответственно с нервым и вторым входами элемента сравнения.
Предлагаемы.й авторулевой отличается тем, что он содержит электронную моделр угловой скорости курса судна, вход которой подключен к выходу датчика угла перекладки рзля, а выход подключен к третьему входу усилителя мощности.
Это позволяет улучщить качество стабилизации угла курса судна и у меньщить расход энергии в рулевом приводе при морском волнении.
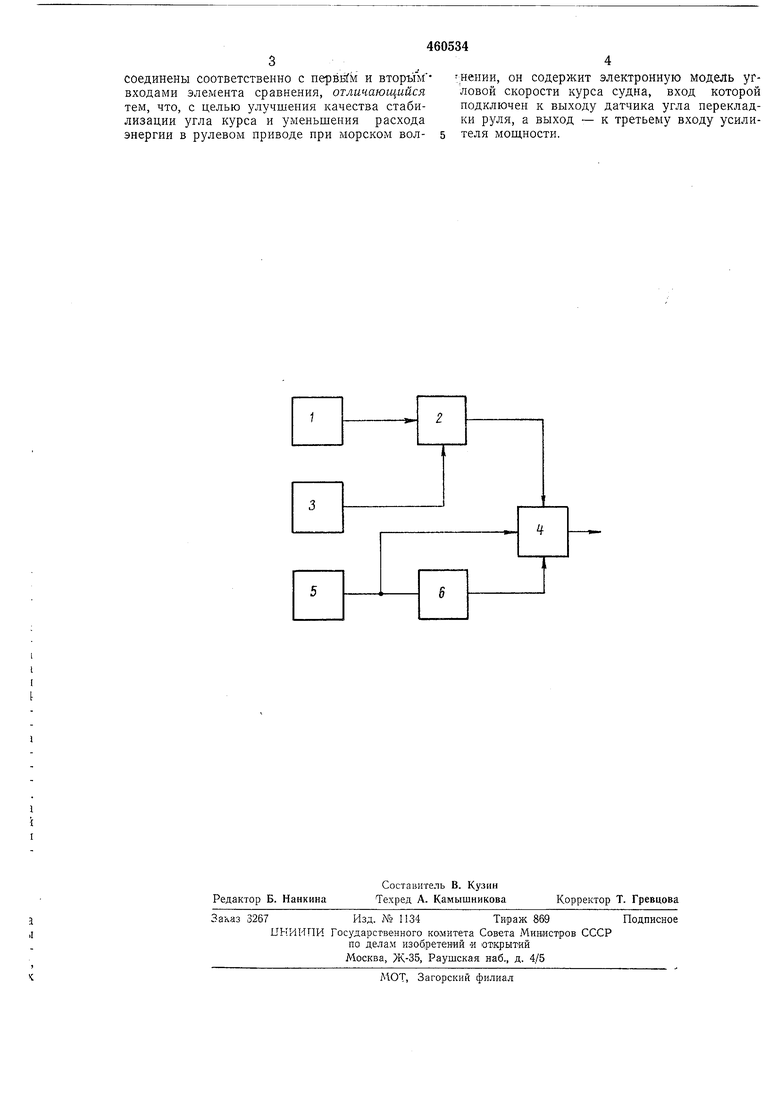
На чертеже изображена структурная схема авторулевого.
Он содержит задатчик I утла курса, выход которого соединен со входом элемента сравнения 2, второй вход которого соединен с выходом датчика 3 курса.
Выход элемента сравнения соединен со входом суммирующего усилителя 4 мощности, другой вход которого соединен с выходом датчика 5 угла перекладки руля.
Электронная модель 6 угловой скорости
курса судна, вход которой соединен с выхоом датчика угла перекладки руля, подклюена к одному из входов суммирующего усилителя мощности.
Задаипое значение величины угла курса
удна подается с задатчика 1 угла курса судна для сравнения с величиной истинного угла курса судна, получаемой с датчика 3 курса на элемент сравнения 2. Результат сравнения
суммируетея на суммирующем усилителе 4 мощности с сигналом с датчика о угла перекладки руля н сигналом, нолучаемым с электронной модели 6 угловой скорости курса судна, на вход которой подается сигнал с датчнка угла перекладки руля. Сигиал с суммируюп 1,его усилителя мощностн подается на исполнительный механизм рулевого привода. Так как не используется сигнал с датчика скорости изменения угла курса, содержащий
больщой уровень помех нри сильном морском волнении, то данное устройство работоспособно при любой погоде.
Пред м е т и з о б р е т е п и я
25
Авторулевой, содержащий датчик угла перекладки руля и элемент сравнения, выходы которых нодключены соответственно к первому и второму входам усилителя мощности, 30 датчик и задатчик курса, выходы которых
соединены соответственно с nepBBfk и вторъ1Л1 входами элемента сравнения, отличающийся тем, что, с целью улучшения качества стабилизации угла курса и уменьшения расхода
энергии в рулевом приводе при морском вол- 5 теля мощности.
нении, он содержит электронную модель угловой скорости курса судна, вход которой подключен к выходу датчика угла перекладки руля, а выход - к третьему входу усили
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| Авторулевой | 1983 |
|
SU1093622A2 |
| Авторулевой | 1987 |
|
SU1529181A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Устройство для перестройки параметровАВТОРулЕВОгО | 1979 |
|
SU830325A1 |