1
Изобретение относится к судовождению и касается, в частности, автоматизации устройств перестройки параметров авторулевого морских судов.
Известны авторулевые, в которых предусмотрена возможность ручной перестройки параметров, в частности, изменение крутизны сигнала рассогласования по курсу и по производной курса. Эти устройства содержат датчики рассогласования курса и угловой скорости курса, датчики угла перекладки руля, сигналы с которых поступают на суммирующий усилитель через регулируемые сопротивления, устанавливаемые рулевым 1. Однако такие устройства не эффективны при изменении динамических свойств объекта управления (загрузки судна, скорости хода), а также при изменении условий плавания (характера внешних возмущений).
Известны также авторулевые, в которых для исключения сильных перегрузок рулевого привода вместо сигнала угловой скорости судна вырабатывается только составляющая угловой скорости судна от управляющего воздействия угла перекладки руля 2.
Восстановление составляющей угловой скорости судна, без внешних возмущений от волнения, с помон;ью электронной модели позволяет исключить необходимость перестройки параметров судна при сильном волнении.
Наиболее близким по технической сущности к данному изобретению является авторулевой, в котором для улучшения динамических характеристик основным источником информации является не гирокомпас, а автономный датчик угловой скорости курса. Этот авторулевой содержит подключенный к первому входу первого множительного блока датчик рассогласования курса, подключенный к первому входу второго множительного блока датчик угловой скорости курса, задатчик пробного сигнала, счетчик времени, два блока сравнения, делительный блок и суммирующий усилитель, соответствующие входы которого соединены с выходами множительных блоков 3.
Недостатком всех указанных авторулевых является необходимость ручной перестройки параметров в зав 1симости от изменения условий плавания судна.
Цель изобретения - повышение точности стабилизации курса и скорости перестройки параметров авторулевого.
Для этого устройство содержит источники опорных снгиалок и блок памяти, выходы которого подключены соответственно ко вторым входам множительных блоков, первый вход блока памяти подключен к выходу второго блока сравнения, входы которого подключены соответственно к первому источнику опорного
сигнала и выходу делительного блока, входы счетчика времени соединены с выходом задатчика пробного сигнала и выходом нервого блока сравнения,., а выход счетчика времени подключен к входу делительного блока и второму входу блока памяти, выход задатчика пробного сигнала подключен к первому входу суммирующего усилителя, к входам первого блока сравнения подключены соответственно датчик угловой скорости курса и выходы второго источника опорных сигналов.
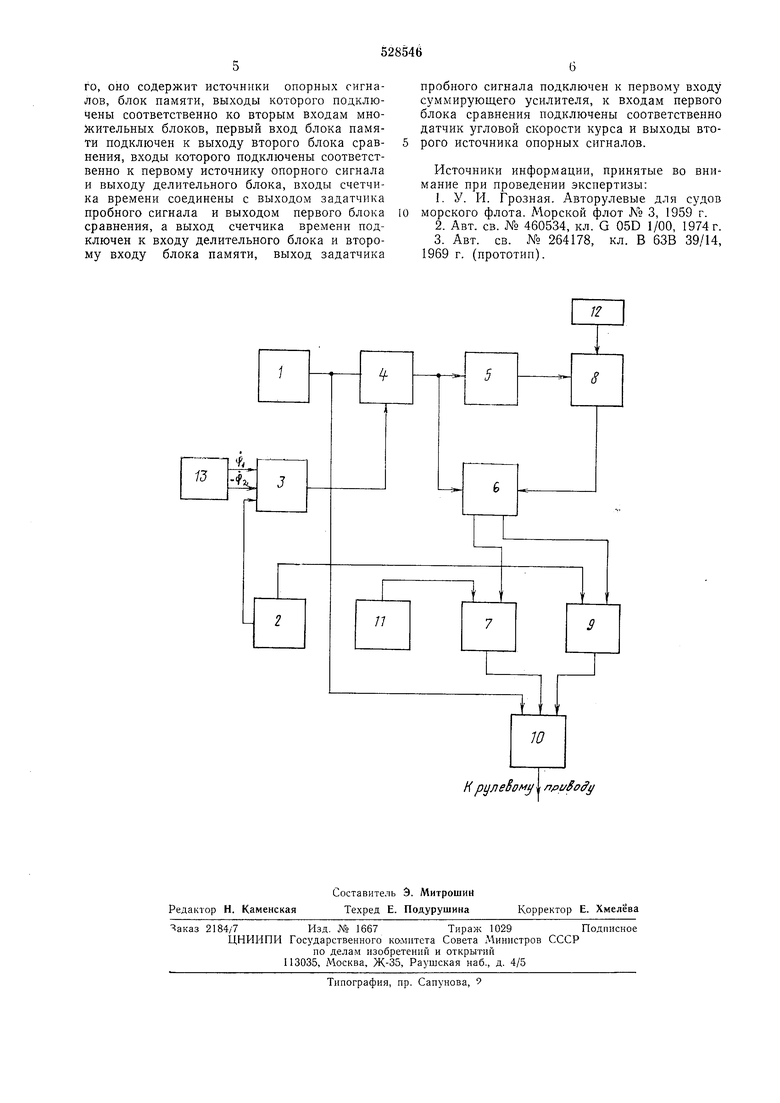
На чертеже изображена блок-схема предлагаемого устройства.
Устройство содержит задатчик пробного сигнала 1, датчик угловой скорости курса 2, первый блок сравнения 3, счетчик времени 4, блок деления 5, блок памяти 6, первый множительный блок 7, второй блок сравнения 8, второй множительный блок 9, суммирующий усилитель 10, датчик рассогласования курса 11, источники опорных сигналов 12, 13.
Устройство перестройки параметров авторулевого работает следующим образом.
С помощью задатчика пробного сигнала 1 производят отклонение руля судна (в устройстве предлагается проводить перекладку руля в сторону правого борта с максимальной скоростью). В процессе перекладки руля происходит постепенное нарастание угловой скорости судна. Сигнал с датчика угловой скорости курса 2 поступает на блок сравнения 3, на входы которого со второго источника опорных сигналов 13 поступают также опорные значения уставки угловых скоростей курса +(fi я и-ф2. При достижении текущей угловой скорости судна уставки фь происходит переключение знака пробного воздействия в задатчике пробного сигнала 1 и скорость перекладки руля меняется на противоположную и равна вновь максимальной. Руль начинает перекладываться в обратную сторону (в сторону левого борта) до момента, когда судно достигает значения угловой скорости курса, равной второй уставке -ф2- С помощью счетчика времени 4 измеряется время достижения судном опорных значений +(pi и -ф2 - ti и iz соответственно; полученные значения ti и t2 поступают на делительный блок 5, на выходе которого получается сигнал, пропорциональный отнощению ti/t2, а значение iz, кроме того, поступает на блок памяти 6. Величина iz, пропорциональная инерционности судна, зависит от скорости хода и загрузки судна. Сигнал, пропорциональный значению t2, поступает на первый множительный блок 7, на второй вход которого приходит сигнал от датчика рассогласования курса П. Таким образом, на выходе первого множительного блока 7 формируется сигнал /СгАф, где Ki - перестраиваемый коэффициент крутизны сигнала рассогласования по курсу, зависящий от динамики объекта.
Напряжение, пропорциональное ti/t2, поступает на вход множительного блока 9, на второй вход которого одновременно приходит сигнал от датчика угловой скорости курса 2. Таким образом, во втором множительном
блоке 9 формируется сигнал , где К - за данный заранее минимально допустимый коэффициент крутизны сигнала производной по курсу.
В блоке сравнения 8 происходит сравнение выходной величины, снимаемой с блока деления 5 с постоянной уставкой (ti/t2)o, поступающей из первого источника опорных сигналов 12. В том случае, когда величина (ti/t2) незначительно отличается от заданной (ti/t2)o, блок памяти 6 осуществляет перестройку ко эффициента /Ci(t2) в первом множительном блоке 7, коэффициент К2 во втором множительном блоке 9 в этом случае не перестраивается. Если величина (ti/t2) существенно отличается от заданной, (т. е. волнение моря велико), по величине сигнала, поступающего с блока сравнения 8 на блок памяти 6, в последнем по величине рассогласования сигналов (ii/iz) и (ti/t2)o оценивается степень волнения моря, и выдается сигнал во второй множительный блок 9 на перестройку коэффициента /(2(ti/t2). Перестройка коэффициента /Ci при сильном волнении не осуществляется.
Сигналы с изменяющимися параметрами по Аф и ф с множительных блоков 7 и 9 поступают на суммирующий усилитель 10 авторулевого.
С целью исключения ощибок пробное измерение повторяют 2-3 раза подряд. Перестройка параметров авторулевого производится с периодичностью 1-2 час.
Использование предлагаемого изобретения повышает эффективность автоматической стабилизации курса судна, благодаря перестройке параметров в зависимости от условий эксплуатации. Повыщается также экономическая эффективность использования рулевого привода, т. к. с увеличением волнения на море загрузка рулевого привода повыщается незначительно, благодаря резкому уменьшению дисперсии внещних возмущений, приходящих на вход рулевого привода.
Формула изобретения
Устройство для перестройки параметров авторулевого, содержащее подключенный к
первому входу первого множительного блока датчик рассогласования курса, подключенный к первому входу второго множительного блока датчик угловой скорости курса, задатчик пробного сигнала, счетчик времени, два блока сравнения, делительный блок и суммирующий усилитель, соответствующие входы которого соединены с выходами множительных блоков, отличающееся тем, что, с целью повыщепия точности стабилизации курса и
скорости перестройки параметров авторулевоfo, оно содержит источники опорных сигналов, блок памяти, выходы которого подключены соответственно ко вторым входам множительных блоков, первый вход блока памяти подключен к выходу второго блока сравнения, входы которого подключены соответственно к первому источнику опорного сигнала и выходу делительного блока, входы счетчика времени соединены с выходом задатчика пробного сигнала и выходом первого блока сравнения, а выход счетчика времени подключен к входу делительного блока и второму входу блока памяти, выход задатчика
пробного сигнала подключен к первому входу суммирующего усилителя, к входам первого блока сравнения подключены соответственно датчик угловой скорости курса и выходы второго источника опорных сигналов.
Источники информации, принятые во внимание при проведении экспертизы:
1.У. И. Грозная. Авторулевые для судов морского флота. Морской флот N° 3, 1959 г.
2.Авт. св. № 460534, кл. G 05D 1/00, 1974г.
3.Авт. св. № 264178, кл. В 63В 39/14, 1969 г. (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перестройки параметровАВТОРулЕВОгО | 1979 |
|
SU830325A1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Авторулевой | 1983 |
|
SU1183944A2 |
| Авторулевой | 1977 |
|
SU651321A2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1978 |
|
SU774411A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
