Изобретение относится к автоматическому управлению подвижными объектами, в частности к разделу автоматической стабилизации курса морского судна.
Цель изобретения - повышение надежности авторулевого при разных погодных условиях плавания.
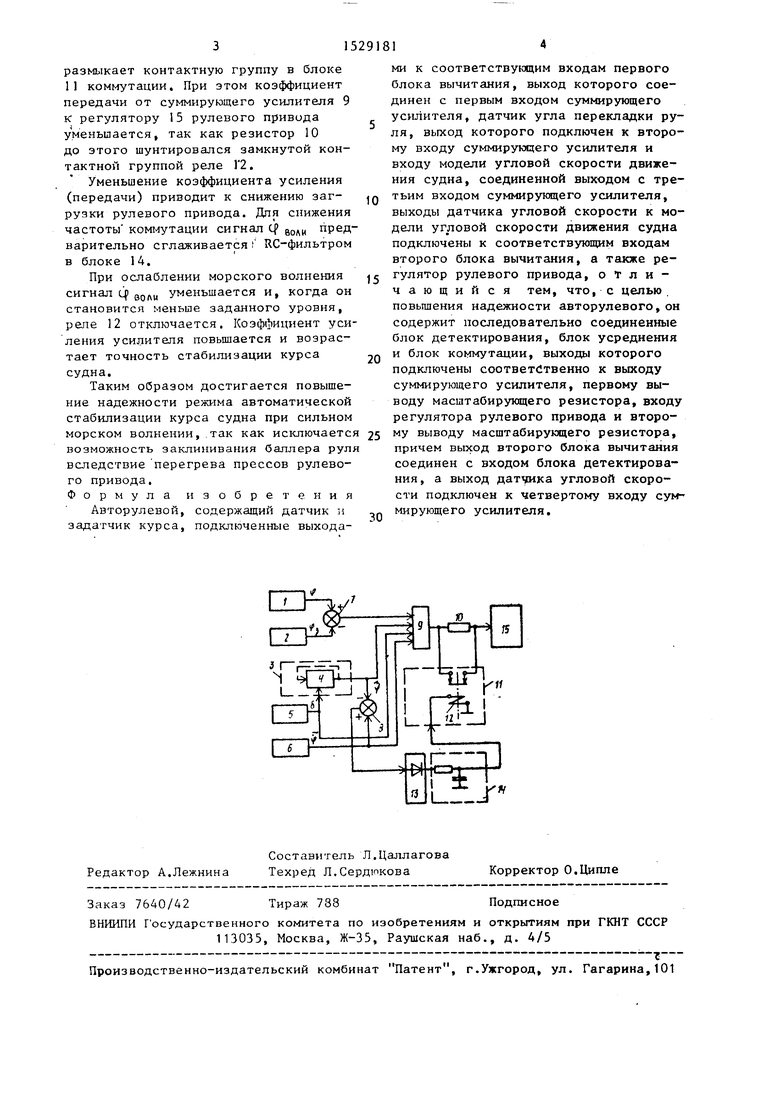
На чертеже приведена функциональная схема авторулевого.
Авторулевой содержит датчик 1 и задатчик 2 курса, модель 3 угловой скорости движения судна, интегратор 4, датчик 5 угла перею1адки руля, датчик 6 угловой скорости судна, два блока 7 и 8 вычитания, суммирующий усилитель 9, масштабирующий резистор 10, блок П коммутации, реле 12, блок 13 детектирования, блок 14 усреднения и регулятор 15 рулевого привода.
Работа предлагаемого авторулевого при спокойном море не отличается от работы известного авторулевого. При увеличении волнения на море на выходе блока 8 появляется сигнал, харак- теризукнций степень воздействия морского волнения на судно, в виде разницы между полным сигналом угловой скорости судна и компонентой его только от управляющего воздействия
угла перекладки руля л
а
с
м
волн
Lf -Cf,
где (f - полный сигнал угловой скорости судна, измеренный датчиком 6 угловой скорости судна;
Ч - оценка сигнала угловой скорости судна от управляющего воздействия угла перекладки руля, вырабатываемая моделью 3 угловой скорости движения судна (компонента угловой скорости от управления); LP ьолц- компонента угловой скорости
судна от воздействия волн. При достижении сигналом Ц воли четного уровня срабатывает реле 12 и
ел
гч:)
СХ)
размыкает контактную группу в блоке 11 коммутации. При этом коэффициент передачи от суммирующего усилителя 9 к регулятору 15 рулевого привода Уменьшается, так как резистор 10 до этого шунтировался замкнутой контактной группой реле Г2.
Уменьшение коэффициента усиления (передачи) приводит к снижению загрузки рулевого привода. Дпя снижения частоты коммутации сигнал Lp цод предварительно сглаживается Г RC-фильтром в блоке 14.
При ослаблении морского волнения сигнал Ц) уменьшается и, когда он становится меньше заданного уровня, реле 12 отключается. Коэффициент усиления усилителя повышается и возрастает точность стабилизации курса судна.
Таким образом достигается повышение надежности режима автоматической стабилизации курса судна при сильном морском волнении, так как ис1спючаетс возможность заклинивания баплера рул вследствие перегрева прессов рулевого привода. Формула изобретения
Авторулевой, содержащий датчик и задатчик курса, подключенные выхода
ми к соответствующим входам первого блока вычитания, выход которого соединен с первым входом суммирующего усилителя, датчик угла перекладки руля, выход которого подключен к второму входу суммирующего усилителя и входу модели угловой скорости движения судна, соединенной выходом с третьим входом суммирующего усилителя, выходы датчика угловой скорости к модели угловой скорости движения судна подключены к соответствующим входам второго блока вычитания, а также регулятор рулевого привода, отличающий ся тем, что, с целью повышения надежности авторулевого, он содержит последовательно соединенные блок детектирования, блок усреднения и блок коммутации, выходы которого подключены соответственно к выходу суммирующего усилителя, первому выводу масштабирующего резистора, входу регулятора рулевого привода и второму выводу масштабирующего резистора, причем выход второго блока вычитания соединен с входом блока детектирования , а выход датчика угловой скорости подключен к четвертому входу суммирующего усилителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА | 1991 |
|
RU2012919C1 |
| Авторулевой | 1981 |
|
SU1095803A1 |
| АВТОРУЛЕВОЙ С ОЦЕНКОЙ УГЛОВОЙ СКОРОСТИ | 2004 |
|
RU2269451C1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Устройство для перестройки параметров авторулевого | 1974 |
|
SU528546A1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2144884C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КУРСОМ СУДНА И СИСТЕМА АВТОРУЛЕВОГО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2004 |
|
RU2282884C2 |
| Авторулевой | 1973 |
|
SU460534A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2029346C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1998 |
|
RU2150409C1 |
Изобретение касается управления движением морскими судами. Авторулевой позволяет повысить качество управления судном при переменных условиях эксплуатации путем адаптации параметров закона управления к внешним возмущениям. Это достигается введением блока детектирования и блока усреднения, а также блока коммутации, которые автоматически изменяют коэффициент усиления регулятора при изменении погоды. 1 ил.
| Авторулевой | 1973 |
|
SU460534A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторулевой | 1975 |
|
SU540258A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
